
通道相位不平衡对火控雷达测角影响分析
2014-03-13 17:38王李民郑启宁杨俊东
雷达科学与技术 2014年3期
王李民,郑启宁,杨俊东
(1.海军92493部队,辽宁葫芦岛125001;2.海军航空兵学院,辽宁葫芦岛125001)
0 引言
单脉冲雷达由于测角精度高而得到广泛应用,其对和差通道中的相位一致性要求较高,因为其直接影响测量精度,相位不平衡有可能造成测角灵敏度降低甚至测量结果完全失真。在设备交验过程中及重大任务前,都应对和差通道相位的一致性进行检查,对于由于种种内部和外部因素导致的一致性超差,应及时分析误差产生原因,并采用信号处理等方式加以补偿,以保证测角精度。本文对某型火控雷达在工作中出现的相位跳变问题进行分析,阐述了影响雷达相位一致性的因素,并通过仿真分析了相关参数对雷达测角特性的影响。
1 振幅和差式单脉冲测角理论
单脉冲测角技术是通过比较两个或多个同时天线波束的接收信号来获得精确的角位置信息[1]。在跟踪雷达中,单脉冲处理器输出的角偏差误差信号送入雷达天线的随动角伺服系统,以驱动天线向角误差减小的方向运动,从而使天线波束连续追随目标前进[2]。
在振幅和差单脉冲雷达系统中,如图1所示,为了确定一个平面内的角坐标,就要形成两个互相迭交的天线方向图,并设它们的中心线对等强信号方向偏离的角度分别为±θs。在零轴上,两波束图幅度相等,当目标在A点,并且从零偏离θ角时,则低波束接收信号大于高波束接收信号,两个信号的幅度差即表示等强方向的偏移量,而两个幅度之差的符号则表示等强方向相对于目标的偏离方向。典型的单脉冲雷达接收机通常有和、方位差、俯仰差三个接收支路,并对接收信号进行归一化处理。因为火控雷达在跟踪目标时,目标始终处于天线电轴附近,所以和信号的幅度近似地与目标的偏差角无关,仅随目标回波的大小而变,而且这种变化和、差信号都是一致的。通过对和、差信号进行归一化,差信号中回波幅度变化的影响便能较好地消除。和差方向图如图2所示。

图1 振幅定向法中角坐标的确定
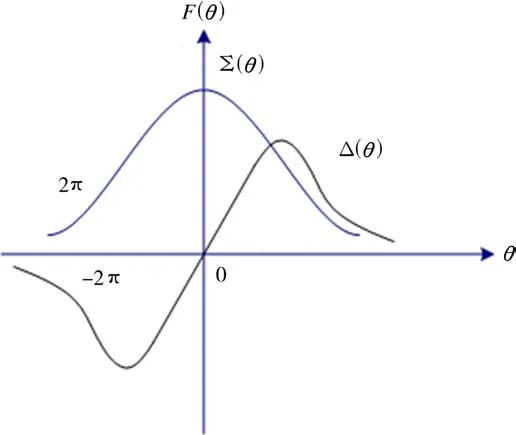
图2 和差方向图
下面简要叙述单脉冲系统工作流程与原理。
设两个分别与零轴方向偏离±θs的天线波束方向图F1(θ)与F2(θ),当目标偏离等强信号方向的偏移量很小时,天线第一支路和第二支路输出的信号由以下两式确定:

式中,Em为θ方向的目标回波信号。
假定波导桥对功率平均分配,则波导桥输出的和信号及差信号分别为

现假定目标的误差角为ε,在跟踪状态,ε很小,将Δ展开成Talor级数并忽略高次项,则

2 通道不一致影响
比幅单脉冲雷达的角度提取一般采用和差支路相位检波,图3给出了双平面内对目标进行单脉冲定向的幅度和、差单脉冲系统原理框图。

图3 幅度和差单脉冲系统原理框图
单脉冲天馈线形成的和、差信号通常要经过高频放大器、混频放大器及中频放大器再送到差路相位检波器进行处理,最终差支路鉴相器输出可表示为(取实部)

式中,Σ及φΣ分别为输入接收机和支路的模及相角;Δ及φΔ分别为输入接收机差支路的模及相角;E为AGC的比较电平;KΣ1,KΔ1分别为和、差支路高频放大器、混频放大器及中频放大器部分总增益的模,其总相移分别为φKΣ,φKΔ。从式(6)可以看出,相位差的存在会使测角灵敏度降低。
为了得到较高的测角精度,设计中一般尽量采用数字补相方法使φKΣ与φKΔ之间的相位差为0。由于种种内部和外部因素,通道间的一致性很难得到保证,引起接收机相位不一致的原因有:
(1)零件很难严格按照给定的公差制造;
(2)零件在使用过程中不可避免地会老化,因而引起一些参数的变化;
(3)在设备的使用过程中,因个别元件的温升使某些电路失调及失配;
(4)雷达可能会受到外界杂波的作用。
3 和、差通道相位不一致对测角精度的影响
为了分析通道相位差对雷达测角精度的影响,进行如下仿真。仿真研究中天线方向图用高斯函数近似:

从图4可以看出,60°相位不平衡会引起定向曲线斜率变小,测角灵敏度明显降低,同时从图5还可以看出,10°相位不平衡对定向特性曲线几乎没有影响。
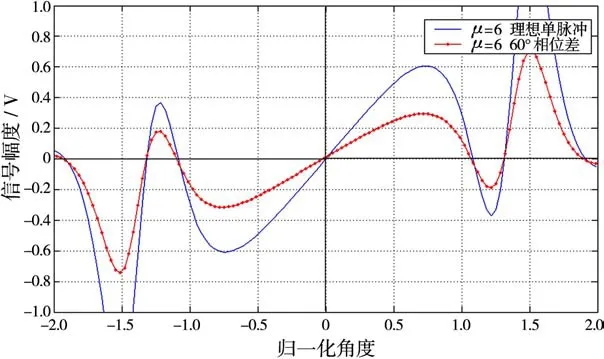
图4 相位差为60°对测向曲线的影响
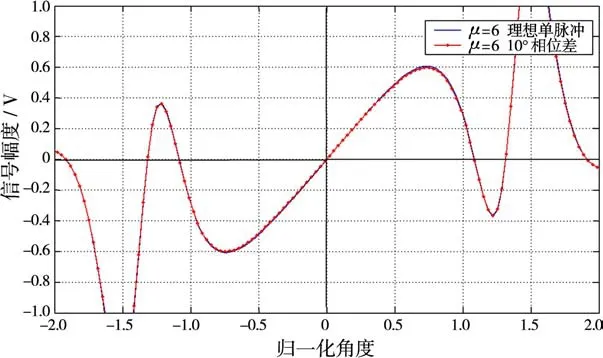
图5 相位差为10°对测向曲线的影响
4 通道相位一致性改进方法
雷达通道相位不一致对测角精度、跟踪质量都有直接的影响[3],因此一定要在必要的环节按一定的要求去控制相位差别。除了在设计时尽量保证各支路相位一致性外[4],还应在使用过程中采用相应的改进方法[5],以保证系统的测量精度,改进方法很多[6],本文主要从信号注入法和标定法两个方面作介绍。
4.1 信号注入法
将合成信号源的射频输出接天线方位(俯仰)测试信号注入口,用示波器接中频接收机相干检波和路信号与方位(俯仰)差路信号。改变射频点,在示波器上读出每一点频方位差(俯仰差)信号相对于和信号的相位延迟时间和信号周期,计算出每一点频的相位差,利用信号处理方法对接收机三路通道进行相位修正。
4.2 标定法
在距离雷达站适当距离处架设高度满足要求的信号源(或用气球托起反射体),以形成孤立的点目标,以标定的电轴中心为参考点,将天线方位和俯仰各拉偏1 mrad,读取方位(俯仰)误差,改变频点,记录每一频点的误差,利用信号处理方法对接收机三路通道相位一致性进行补偿。
通过补偿和修正,接收通道相位误差都能控制在10°之内,能够满足雷达测角精度要求。
5 改进方法效能分析
如果和通道与差通道之间存在相位不平衡,有相位差Δφ2,其影响主要反映在测角灵敏度的降低和天线电轴的漂移上。以某型雷达为例,由于微波接收机和路场放组件老化造成了相位差不稳定,通过信号注入法对相位进行校正。表1和表2分别是在和路场放更换前和更换后和路与俯仰支路相位差的变化情况。

表1 和路场放更换前数据对比

表2 和路场放更换后数据对比
从表1可以看出,由于微波组件老化造成通道相位差变化最大达到45°,在更换相关组件并经过相位调整后,通道相位差在10°之内,如表2所示。
6 结束语
本文研究了实际中应用比较广泛的振幅和差式单脉冲雷达测角特性,分析了通道相位不一致的影响因素,结合实例介绍了高频器件老化造成和差通道相位差的变化情况。最后通过仿真模拟了误差大小对定向曲线的影响,仿真结果表明,相位不平衡会极大地影响单脉冲雷达测角灵敏度,进一步说明了验前相位检查的重要性。
[1]黄虹.单脉冲雷达[M].北京:国防工业出版社,1975.
[2]方棉佳,吕涛.单脉冲和差波束测角的精度研究[J].雷达科学与技术,2013,11(6):645-649.FANG Mian-jia,LV Tao.Research on Precision of Angle Measurements in Monopulse Sum-Difference Beams[J].Radar Science and Technology,2013,11(6):645-649.(in Chinese)
[3]SHERMAN S M,BARTON D K.Monopulse Principles and Techniques[M].Dedham,MA:Artech House,1984.
[4]郑生华.振幅和差单脉冲雷达接收机高幅-相一致性AGC的设计[J].现代电子,2000(4):37-40.
[5]姜义成,喻春曦.一种改善单脉冲雷达测角精度的新方法[J].雷达科学与技术,2009,7(5):380-383.JIANG Yi-cheng,YU Chun-xi.A Novel Approach for Angle Measuring Precision Improvement in Monopulse Radar System[J].Radar Science and Technology,2009,7(5):380-383.(in Chinese)
[6]刘洪燕,郜丽鹏.比幅比相测角系统信号处理技术研究[J].应用科技,2003,30(10):7-9.
猜你喜欢
西安石油大学学报(自然科学版)(2022年5期)2022-10-08
电讯技术(2022年9期)2022-09-28
火控雷达技术(2021年1期)2021-04-20
北京航空航天大学学报(2020年3期)2021-01-14
航天电子对抗(2018年3期)2018-07-14
电机与控制学报(2018年9期)2018-05-14
航天电子对抗(2018年6期)2018-03-04
科技与创新(2017年7期)2017-05-13
汽车维修技师(2016年11期)2016-05-05
制导与引信(2016年3期)2016-03-20
