
基于迭代端点拟合辅助的目标机动检测方法
2014-03-08 06:43颜世刚石章松
舰船科学技术 2014年4期
颜世刚,石章松
(1.中国人民解放军92941部队,辽宁葫芦岛 125000;2.海军工程大学电子工程学院,湖北武汉 430033)
基于迭代端点拟合辅助的目标机动检测方法
颜世刚1,石章松2
(1.中国人民解放军92941部队,辽宁葫芦岛 125000;2.海军工程大学电子工程学院,湖北武汉 430033)
提出一种基于迭代端点拟合辅助的目标机动检测方法。考虑图像离散点曲线拟合与机动目标跟踪的相似性,在运用现有的方法进行目标机动检测的同时,采用迭代端点拟合原理提取目标机动信息,将得到的机动信息反馈到目标机动检测处理中,能够更为准确地检测出机动起始点。数值仿真表明,该方法能够更准确地发现机动起始信息,提高目标机动检测方法的性能。
点迹;迭代端点拟合;目标机动检测;机动目标跟踪
0 引言
机动目标跟踪方法主要有基于决策的单模方法与多模方法。对于基于决策的单模方法而言,机动目标跟踪处理过程主要包括观测数据的预处理、机动目标模型、机动检测与机动辨识、滤波与预测以及跟踪坐标系和滤波状态变量的选取等,机动检测与机动辨识是其中的重要模块,目的是检测目标运动模式的变化。尽管多模方法的跟踪性能较之单模算法要好,但其设计过程复杂且计算资源耗费大,因此适用范围受到限制[1-2]。而研究表明,配合好的机动检测方法,基于决策的单模算法可以获得与多模算法相近的跟踪性能,因此及时准确地实现目标的机动检测成为此类方法的关键[3-4]。主要的检测方法有滑窗式检测方法及其改进方法等[5-6],文献[7]对典型的机动检测算法的算法特性进行了数值仿真与比较,这些研究为机动检测方法的研究提供了帮助。
实际上,机动目标跟踪就是对属于同一目标的点迹进行曲线拟合。因此考虑图像曲线拟合与机动目标跟踪处理的相似性,采用数字图像处理中的有关方法对点迹进行处理,可以提取到一定的目标机动运动信息,包括机动起始点、机动起始时刻等,将该信息反馈到传统的目标机动检测方法处理流程中,能够更进一步地了解目标机动运动的细节,更为细致地刻画目标的机动运动轨迹,提高目标机动检测方法的性能。
1 算法原理
对于机动目标而言,虽然机动样式多变,但实质上均由变向和变速2种模式组合而成。因此机动运动模式可大致分为匀速变向机动、直线变速机动以及变速变向机动等3类,如图1所示。
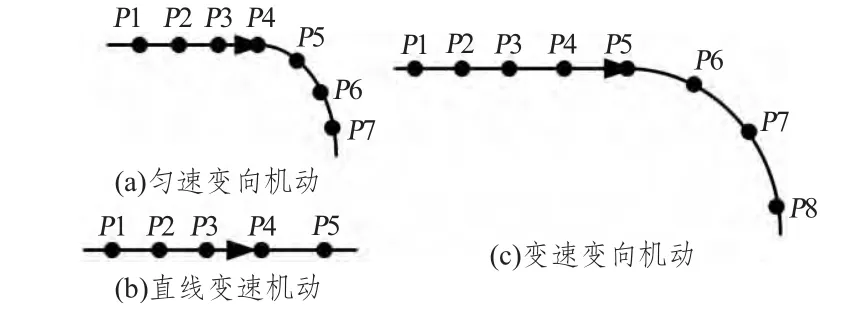
图1 机动运动的3种模式Fig.1 Threemodes of targetmaneuvering
相比于匀速直线运动目标,在对机动目标进行跟踪滤波时,预测值与观测值之间的距离值将随着目标机动进行过程而逐渐增大。在按照既定的运动模型进行目标跟踪时,若目标发生机动,则在一定点迹录取周期之后,滤波预测值与观测值之间的误差将达到一个不能接受的程度,此时,可以判定目标发生了机动,如图2所示。随着目标的机动,预测值与观测值之间的距离 (P5与P5'、P6与P6'、P7与P7')越来越大,此时设定一个门限值,当差值大于门限值时,可以判定目标已经发生机动。
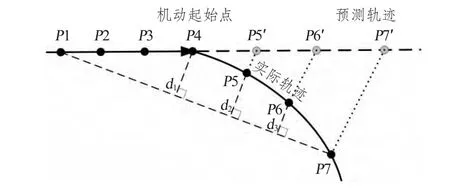
图2 算法原理示意图Fig.2 The principle of algorithm
在判定目标发生机动的基础上,按照一定规则选取一定数量录取周期内的点迹,考虑目标跟踪与离散点曲线拟合的相似性,采用数字图像中进行离散点曲线拟合的迭代端点拟合方法进行处理,根据各点与进行迭代处理点迹集合中首尾点迹连线的距离关系实现目标机动参数的提取。
2 基于迭代端点拟合的目标机动检测方法
1)目标是否发生机动的判别
设传感器在x方向上的测量均方差为dx,在y方向上的测量均方差为dy,当前时刻预测点迹值与测量值之间x方向上的预测均方差为dx',y方向上的预测均方差为dy'。为了保证既能及时检测到目标发生机动,同时又能保证后续处理时准确地发现目标的机动起始点,经试验验证,在进行门限值的选定时,以3dx与3dy作为门限值能够取得较好的判别效果,因此选择3dx与3dy为门限值进行判别,即

2)迭代端点拟合方法
迭代端点拟合方法是数字图像处理中进行离散点曲线拟合的一种方法,其实现曲线拟合原理如图3所示,具体步骤如下:
①首先连接离散点集合的2个端点AB,计算离散点集中各个点到直线AB的距离;
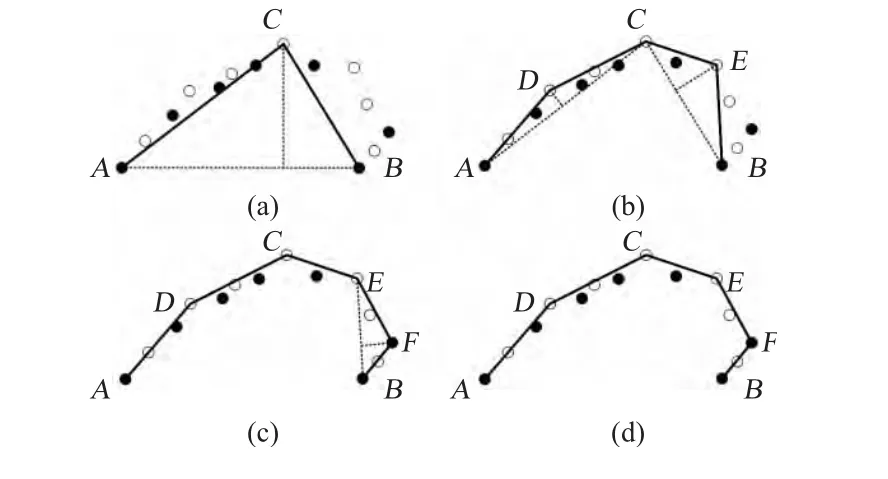
图3 基于迭代端点拟合的曲线拟合方法原理Fig.3 The principle of iterative endpoint fittingmethod
②设定一个门限值,找出与AB距离最大的点C,若该点距离直线AB的值小于门限值,则认为是两端点内的点属于同一组点,可用某一函数拟合,否则进入步骤②;
③连接AC与CB,然后对每一段线段按照步骤①和步骤②进行迭代拟合,直到找出所有距离超出门限值的点,称之为转折点,则相邻转折点内的点为一组采用某函数进行拟合。
3)目标的机动检测
①确定进行端点迭代拟合的点迹的数量。设一段时间内所有录取点迹的数量为i,预测值与观测值之间的误差均大于传感器探测误差,且最新录取的点迹预测值与观测值之间的误差超出门限值,则进行端点迭代拟合的点迹的数量n按下式计算:

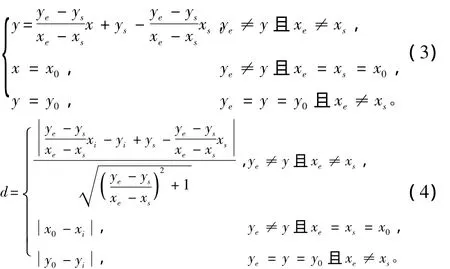
②迭代端点拟合处理。设两端点点迹对应的坐标分别为(xs,ys)和(xe,ye),某非端点点迹坐标为(xi,yi),用式(3)求取两端点连线对应直线的方程,用式(4)求取非端点点迹距该直线距离;
③比较计算得到的各点到端点连线的距离值,找出距离值最大的点,则该点为机动起始点,由此处开始应当切换跟踪模型,进入步骤④;
④输出当前目标的机动检测结果,判断是否完成所有点迹组的判别,若是,则结束,否则返回步骤①,对下一组点迹分组进行处理。
通过对点迹态势图对目标机动信息进行提取,将得到的信息反馈到机动目标跟踪的机动检测与机动辨识环节,从而提高目标机动检测的概率。
完整的数据处理流程如图4所示。
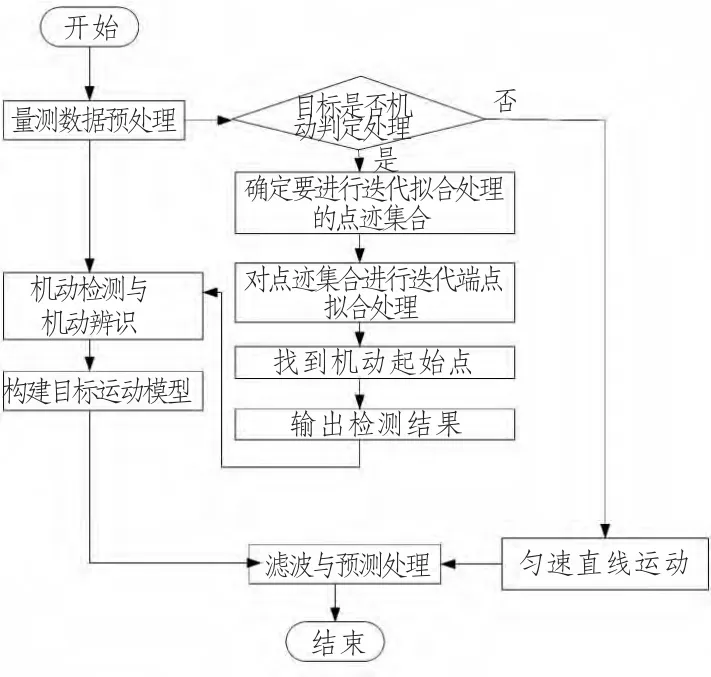
图4 算法处理流程Fig.4 Data processing flows
3 算法仿真与分析
设目标运动场景为:1部坐标雷达对一水平面上运动的目标进行观测,目标在t=0~200 s沿y轴做匀速直线运动,运动速度为30 m/s,方向为沿y轴负方向,目标的起始点为 (2 000 m,10 000 m),在t=200~300 s向x轴方向做90°的慢转弯,加速度为ax=ay=0.15 m/s2,完成慢转弯后加速度将降为0,从305 s开始做90°的快转弯,加速度为0.6 m/s2,在330 s结束转弯,加速度降至0。雷达扫描周期T=2 s,在x方向和y方向独立地进行观测,观测噪声的标准差均为50 m。
为了验证算法的有效性,本文针对上述例子,采用基于Singer模型的机动跟踪算法以及引入迭代端点拟合辅助检测的Singer机动模型跟踪算法进行比较计算,目标跟踪轨迹如图5所示。

图5 两种方法跟踪效果对比Fig.5 Target tracking tracks of the twomethods
仿真结果图6给出了该2种方法在x方向和y方向上的估计均方差对比情况。

图6 两种方法在x方向及y方向上的估计误差均方差比较Fig.6 Comparisons of the estimated square errors of twomethods
从仿真结果可以看出,基于本文提出的引入迭代端点拟合辅助检测的Singer机动模型跟踪算法在机动检测快速性、跟踪性能上更佳,并且滤波精度高为准确,验证了算法在理论上的准确性和实用性。
4 结语
机动目标跟踪问题一直以来是目标跟踪领域中的难点问题之一。如何提高机动的快速性能和跟踪性能,是机动目标跟踪算法研究中的关键。本文考虑到曲线拟合与目标机动轨迹的相似之处,借鉴图像中曲线拟合方法的迭代端点拟合方法,提出了一种目标机动辅助检测方法来尝试改善机动目标跟踪性能,扩展了目标机动检测方法的研究思路,具有一定的理论研究意义和应用参考价值。
[1]范红旗,王胜,付强.目标机动检测算法综述[J].系统工程与电子技术,2009,31(5):1064 -1069.
FAN Hong-qi,WANG Sheng,FU Qiang.Survey of algorithms of target maneuver detection[J].Systems Engineering and Electronics,2009,31(5):1064 -1069.
[2]FAN Hong-qi,ZHU Y L,FU Qiang.Impact of mode decision delay on estimation error for maneuvering target interception[J].IEEE Transactions on Aerospace and Electronic Systems,2011,47(1):702 -711.
[3]BIZUP D F,BROWN D B.Maneuver detection using the range ratemeasurement[J].IEEE Trans.on AES,2004,40(1):330-336.
[4]RU JF,CHEN H M,LIX R,eta1.A range based detection technique for tracking a maneuvering target[C].Proc.of SPIE on Signal and Data Processing of Small Targets,2005.
[5]CHAN Y T,HU A G C,PLANT JB.A Kalman filter based tracking scheme with input estimation[J].IEEE Trans.on AES,1979,15(2):237 -244.
[6]L X R,VESSELIN P J.A survey of maneuvering target tracking-Part IV:decision-basedmethods[C].Proceedings of SPIE Conf.on Signal and Data Processing of Small Targets,2002.
[7]石章松,谢君.机动目标检测算法特性分析仿真研究[J].计算机仿真,2007,24(9):90 -94.
SHI Zhang-song,XIE Jun.Simulation and analysis of the characters ofmaneuvering detection algorithm[J].Computer Simulation,2007,24(9):90 -94.
[8]余松煜,周源华,张瑞.数字图像处理[M].上海:上海交通大学出版社,2007:338-340.
YU Song-yu,ZHOU Yuan-hua,ZHANG Rui.Digital image processing[M].Shanghai:Shanghai Jiaotong University Press,2007:338 - 340.
Targetmaneuver detection method with iterative endpoint fitting assisted
YAN Shi-gang1,SHIZhang-song2
(1.No.92941 Unit of PLA,Huludao 125000,China;2.Colleg of Electronic,Naval University of Engineering,Wuhan 430033,China)
A target maneuver detection method based on iterative endpoint fitting is derived and presented.The similarity between image curve fitting andmaneuvering target tracking has been thought of in themethod.With the point situation image was structured,the maneuvering target detection has been realized based on the principle of image iterative endpoint fitting.The effectiveness of themethod has been verified by numerical simulation.
point;image processing;iterative endpoint fitting;targetmaneuver detection
TP273
A
1672-7649(2014)04-0123-03
10.3404/j.issn.1672-7649.2014.04.026
2013-03-19;
2013-08-19
颜世刚(1972-),男,硕士,高级工程师,研究方向为舰炮火控系统试验及仿真。
猜你喜欢
气象学报(2021年2期)2021-05-13
现代计算机(2020年31期)2020-12-28
语数外学习·高中版中旬(2020年8期)2020-09-10
数学大世界(2020年2期)2020-03-07
数字通信世界(2020年2期)2020-03-04
中学生数理化·教与学(2019年8期)2019-09-18
价值工程(2017年31期)2018-01-17
汽车与安全(2017年4期)2017-12-07
投资北京(2017年1期)2017-02-13
专用车与零部件(2016年2期)2016-04-11
