
挠性航天器在轨分离冲击缓冲模糊滑模控制研究①
2014-01-16 01:49赵刚练陈余军
固体火箭技术 2014年5期
赵刚练,姜 毅,陈余军,刘 冬
(1.北京理工大学 宇航学院,北京 100081;2.中国空间技术研究院,北京 100094)
0 引言
随着航天器的发展,空间伴飞、小卫星编队等逐渐成为航天器发展的一个重要方向。有效载荷在轨分离是完成这些功能和任务的基础。挠性航天器与有效载荷分离过程中,为保证有效载荷分离后具有一定的分离速度,分离机构必须提供足够的分离推力推动有效载荷运动。近几年国内对在轨分离过程进行了较多的研究[1-2],但对于分离反作用力对航天器的影响及分离推力的缓冲并未进行深入分析。分离冲击载荷具有时间短、频带宽和峰值大的特点,分离过程中航天器基座受到较大的冲击,而且瞬间过载可能造成航天器中的精密设备损坏。因此,需要采用缓冲装置降低传递到基座的冲击载荷峰值。
有效载荷分离时间量级在150 ms左右,传统的弹簧阻尼机构响应速度慢,难以根据冲击载荷的变化实时调整。近年来,随着材料科学的发展,智能材料被广泛用于减振控制。其中,磁流变阻尼器具有可控、连续和响应快速的特点[3],在冲击减振领域已经得到较为广泛的应用[4-5]。为了保证平稳的缓冲,需要对缓冲装置实施主动控制。滑模控制具有设计灵活、控制精度高、对外部扰动和参数不确定性不敏感等特点,从而成为非线性控制的一种重要控制方法,并应用于冲击减振领域[6-7]。然而,滑模控制由于采用不连续切换控制项使系统存在抖振现象,这种抖振可能会使系统不稳定。使用连续函数代替切换函数[8-9]与边界层调整技术[10]能够有效抑制抖振现象。此外,国内外学者将滑模控制与模糊控制相结合,也有效抑制了抖振,并提高了系统的控制品质,但均未考虑误差变化速率的影响[11-12]。
基于以上研究,本文提出将磁流变阻尼器用于航天器冲击减振,给出了磁流变阻尼缓冲器的基本结构和动力学模型,建立了大范围运动挠性航天器的动力学模型,在传统模糊指数趋近律[13]基础上结合二维模糊控制,提出了以误差和误差导数作为模糊输入,指数趋近律系数为模糊对象的控制策略。仿真结果证实了航天器平台采用磁流变阻尼缓冲器减振的有效性和此控制策略良好的跟踪特性。
1 含缓冲装置挠性航天器动力学模型
1.1 磁流变阻尼缓冲器结构与动力学模型
单杆磁流变阻尼缓冲器结构见图1,主要包括活塞杆、活塞、缸筒、磁流变液、线圈和气囊。活塞与缸筒间的环形面积形成间隙,两者相对运动使磁流变液体从该间隙流过。线圈与活塞和缸筒一起构成磁路,使流液间隙中产生磁场,当液体通过流液间隙时,受到磁场作用,产生屈服应力。

图1 磁流变阻尼缓冲器结构图Fig.1 Configuration of MR shock absorber
为了简化计算和便于控制,选择Bingham模型对缓冲器进行建模。在冲击载荷作用下,环形阻尼通道内磁流变液的速度和加速度值可能很大,使磁流体的流动状态为不规则流动(湍流),必须考虑惯性力的作用。根据流体力学分析可知,磁流变阻尼缓冲器总阻尼力[14]为
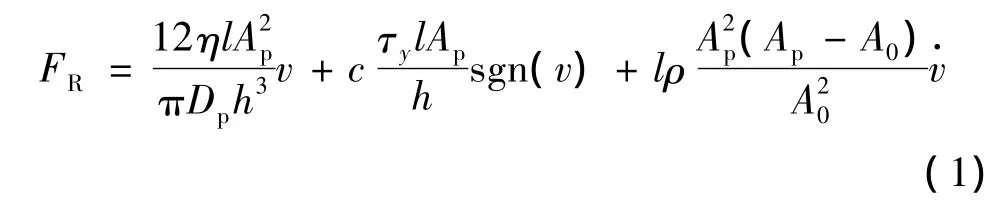
式中 第一项为粘滞阻尼力;第二项为库伦力,即可控制力;第三项为惯性力;η为磁流变阻尼液的表现粘度;l为阻尼器的有效长度;Ap为活塞有效面积;h为环形间隙大小;Dp为缸筒内直径;ρ为磁流变液的密度;c为给定流量条件下的常数,取值为2~3之间。
1.2 含缓冲装置的挠性航天器动力学模型
典型飘浮基挠性航天器系统由中心基座和挠性附件组成,对飘浮基航天器进行如下假设:
(1)两侧挠性附件可作为等截面小变形梁处理;
(2)执行分离任务过程中挠性附件与中心刚体处于锁定状态,即挠性附件与基座采用固定连接;
(3)不对基座的位姿进行主动控制,忽略微重力、锁定机构的柔性和摩擦;
(4)缓冲装置和有效载荷都嵌入基座,且与基座是移动关系,有效载荷分离后解除与基座的移动约束。
挠性航天器模型如图2所示,航天器基座和缓冲装置的活塞缸统称为B1,B2和B3为挠性附件,B4为缓冲装置的活塞杆,B5为有效载荷。

图2 飘浮基挠性航天器动力学模型Fig.2 Dynamic model of free-floating flexible spacecraft
建立图 2 所示的全局惯性坐标系 XYZ,ξB2ηB2ζB2和ξB3ηB3ζB3为挠性体 B2和 B3的动坐标系;ξB4ηB4ζB4、ξB5ηB5ζB5为位于B4、B5质心的随体坐标系,基座的随体坐标系位于基座质心且初始时刻与全局惯性坐标系重合。
挠性附件的广义坐标为

式中 Ri、Rj分别是随体系原点、动坐标系原点的全局位置矢量;θi、θj分别是随体系、动坐标系的欧拉转角;是广义弹性坐标。
RB1、RB4分别表示基座、活塞杆的质心 OB1、OB4的全局位置矢量,RB2、RB3分别表示B2和B3动坐标系原点的全局位置矢量,则基座上的任一点P和挠性体B2的任一点Q在全局坐标系中的位置矢量为

式中 AB1为B1随体坐标系与全局坐标系的坐标变换矩阵;AB2为B2动坐标系与全局坐标系的坐标变换矩阵;为P点在随体坐标系ζB1ηB1ζB1中的坐标列阵;和分别为Q点未变形前和变形后在动坐标系ηB2ζB2中的坐标列阵为 B2上第 j个单元在动坐标系中的单元形函数;Cj为单元局部坐标系向物体动坐标系的变换矩阵;为单元结点位移向量局部坐标与动坐标系之间的变换矩阵;为常数矩阵;Φj为单元局部坐标系中的单元形函数,本文采用三维二节点欧拉-伯努利梁单元进行离散。
同理,可得其他体上任一点的位置矢量。
对各个组件的矢量坐标求导,可得系统的总动能和弹性势能如下:

矩阵M为

其中,柔性体B2和B3采用一致协调质量矩阵计算:

对于刚体B1、B4和B5的质量矩阵可由下式求解:

其中


式中 G的各列分别为沿3个欧拉转动轴的单位矢量在全局坐标系中的坐标列阵[15]。
利用式(4)和式(5)由拉格朗日方程可得漂浮基挠性航天器系统刚柔耦合多体动力学方程:

式中 q为系统的广义坐标;Φ为系统约束方程;Φq为系统约束方程对广义坐标的雅克比矩阵;λ为拉格朗日乘子;u为系统的广义控制力;Qe为系统的广义惯性力;F=Kq为系统的广义弹性力;C=α2M+β2K为系统的阻尼;γfix为约束方程的右端项;α1、α2、β1、β2为常数。
令:

则
其中

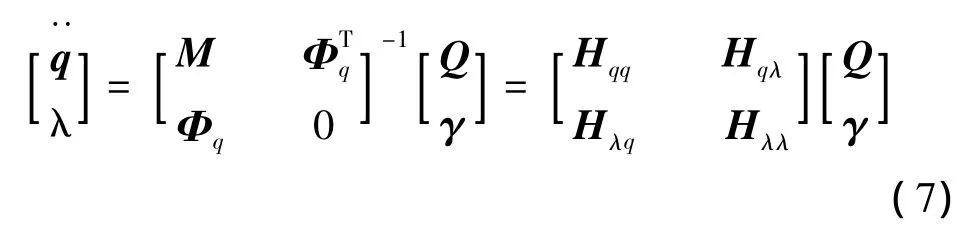
由式(7)可得
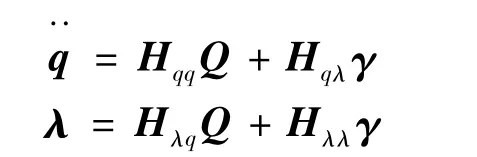
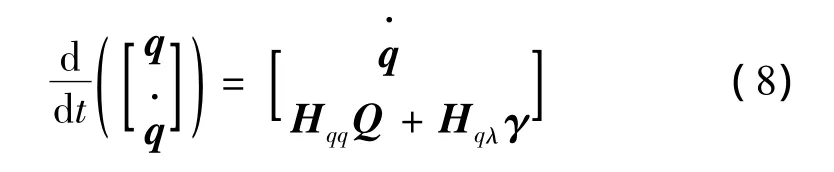
故此挠性航天器系统的状态方程为
2 分离冲击载荷下缓冲器控制策略
2.1 滑模控制设计与稳定性分析
为了降低冲击载荷对安装在基座中仪器的影响,采用缓冲装置将短时大峰值的冲击载荷转换为长时小峰值的作用力。因此,需要控制磁流变阻尼缓冲器的库伦力,保证缓冲装置的总输出阻尼力为恒定目标值,从而实现作用在基座上的力不随冲击载荷改变。根据此要求,将缓冲器的输出与预期输出值之间的差值e作为误差控制。基于滑模控制的基本思想,选择滑模面

其中,k的选择满足Hurwitz多项式条件。
为方便计算,采用高为炳教授提出的趋近律概念,选择指数趋近律进行计算:

式中 ε和δ为调整趋近律的参数。
对式(9)求导得

由于航天器受到冲击后基座和缓冲装置同时运动,故式(12)中的位移、速度和加速度是缓冲装置相对于基座随体坐标系的值,则沿基座ζ方向的速度vζ和加速度aζ分别为

将式(1)、式(9)、式(10)、式(13)和式(14)代入式(11),则有

对式(15)进行化简得

式中 Fd=(c1vζ+c2aζ)。
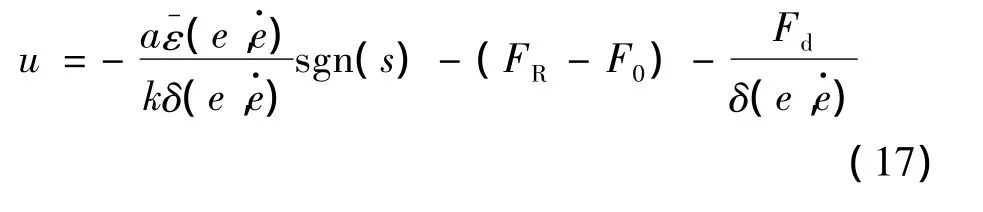
求解此微分方程并忽略与时间相关的幂次项,得控制力的表达式为


2.2 二维模糊滑模控制
控制律式(16)中的切换项用于补偿建模误差和外界干扰等不确定项,保证滑模存在性条件得到满足,但也是造成抖振的主要原因。δs项影响系统趋近过程,从而影响系统的动态品质。为抑制抖振现象,本文提出以规范化的误差和误差的导数作为输入的二维模糊规则来控制趋近律参数和的值和分别ε和δ是规范化后的值。将引入模糊控制后能够考虑误差导数变化对系统的影响,使控制系统根据误差e的变化方向和当前误差的正负及时调整输出,从而提高系统对理想输出的跟踪效果,克服了传统只通过e的正负控制输出无法提前判断误差方向的缺点[16-17]。根据ε和δ对系统状态的影响[18],模糊控制规则设计原则为:

式中 NB为负大值;Z为零;PB为正大值。
为方便实时计算,采用三角形隶属度函数,如图3所示,模糊规则如表1所示。

图3 隶属度函数Fig.3 Membership function
表 1 、控制规则Table 1 Fuzzy control rulesand
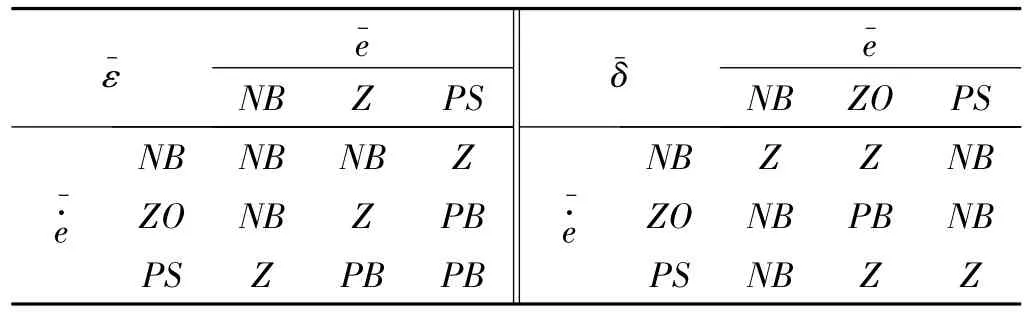
表 1 、控制规则Table 1 Fuzzy control rulesand
ε- e -δ- e -NB Z PS NB ZO PS e·-NB NB NB Z ZO NB Z PB e·-NB Z Z NB ZO NB PB NB PS Z PB PB PS NB Z Z
根据控制规则并采用代数积-Max-重心法[19],将模糊控制器输出量和转化为精确的控制量。
采用模糊推理后控制量u的表达式为
3 数值算例
飘浮基航天器处于无重力环境下,初始时刻系统处于静止状态。系统各组件的参数如表2和表3所示。挠性附件各划分为6个梁单元,截面为20 mm×20 mm的正方形。缓冲装置参数如下:ρ=3.09×103kg/m3、η =240 cP、l=350 mm、Ap=204 mm2、h=2 mm、Dp=8 mm,分离推力通过火工品燃烧产生高压气体作用于活塞产生,有效载荷所受推力如图4所示。设仿真时间为5 s,仿真步长为1.0×10-5s,理想输出 F0=90 N。经多次试探仿真,取 ε =0.05、δ=1 000、k=10对比缓冲装置开启(采用式(17)控制总阻尼力输出)和缓冲装置关闭(缓冲装置与基座相对固定无阻尼力输出)2种情况,仿真结果如图5~图9所示。
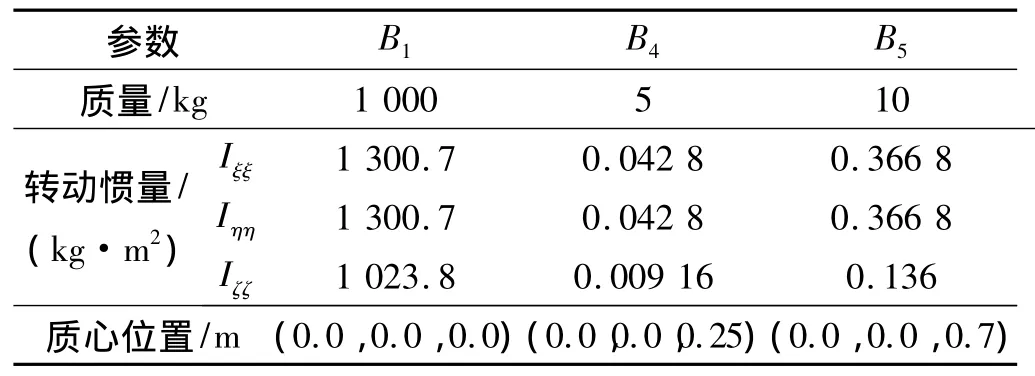
表2 基座和缓冲装置物理参数Table 2 Physical parameters of the base and shock absorber

表3 挠性附件的物理参数Table 3 Physical parameters of flexible appendages

图4 分离推力曲线Fig.4 Thrust curve
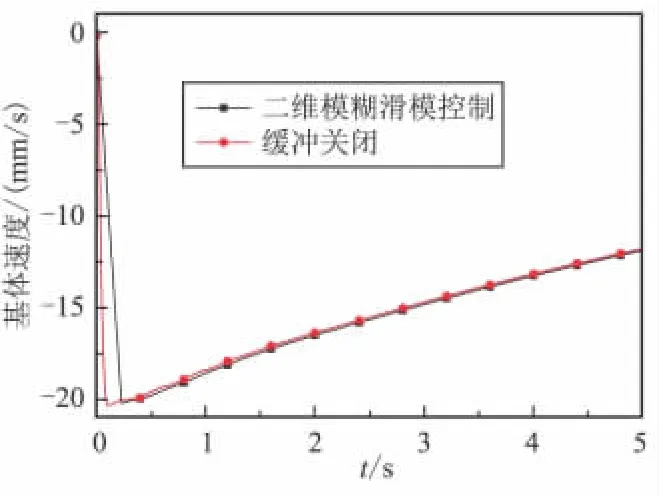
图5 基体速度Fig.5 Velocity of the base

图6 挠性体B2端点A相对于基体的速度Fig.6 Velocity of point A with respect to the base

图7 基体加速度Fig.7 Acceleration of the base
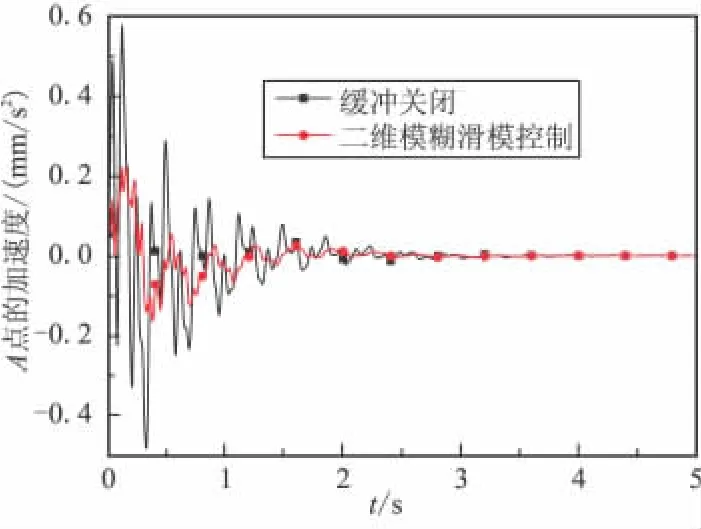
图8 挠性体B2端点A相对于基体的加速度Fig.8 Acceleration of point A relative to the base
由图5可知,缓冲装置关闭时相对于减振装置开启时基座速度迅速上升,而且有波动,增加缓冲装置后,基体最大速度由 20.35 mm/s降为 20.23 mm/s,到达最大速度后,由于挠性附件变形回弹基体逐渐减速。从图6可看出,缓冲装置输出阻尼力时,端点A弹性变形速度曲线显著平稳,波动频率更低,而且峰值由43.81 mm/s下降为37.19 mm/s,下降幅度达到15.1%。
从图7基体的加速度曲线可发现,采用缓冲装置后,基体的加速度峰值显著减小,由463.99 mm/s2降为90.87 mm/s2,降幅达到 80.4%,缓冲效果较为明显。图8为端点A相对于基体的加速度,与速度曲线类似,加速度峰值显著下降,而且曲线波动减少,更为平稳。
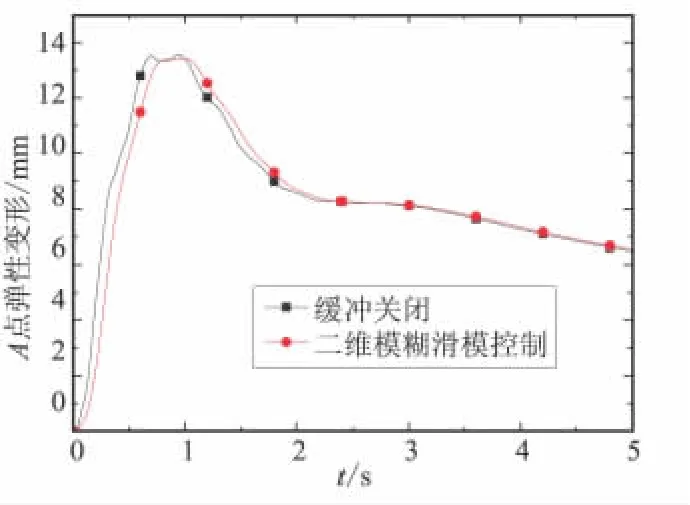
图9 挠性体B2端点A的弹性变形Fig.9 Elastic deformation of point A in B2
从图9中端点A相对于基座ζB1轴的弹性变形可看出,缓冲装置关闭时在0.6~1 s内弹性变形曲线发生了局部波动,这是基座的刚性位移与挠性附件的弹性变形发生了强烈耦合所导致的。缓冲装置输出阻尼力后,弹性变形曲线变化较为平稳,最大弹性变形量由13.567 mm降为13.427 mm。另外可看出,由于分离时间短,且挠性附件振动频率低。所以,缓冲装置对挠性附件弹性变形的抑制作用不明显。
为了说明本文控制方法的有效性,分别采用传统滑模控制、单变量模糊滑模控制和本文的模糊滑模控制3种方法,对缓冲装置进行控制,并进行仿真计算,仿真结果如图10、图11所示。
从图10所示的缓冲装置相对于基座的滑动距离曲线可看出,本文控制方法的滑动距离为0.313 2 m,此距离相对于基座的尺寸在接受范围之内,满足工程要求。从局部放大图也可看出,稳定输出后,采用二维模糊滑模控制的缓冲装置滑动距离小于传统滑模控制和单变量模糊滑模控制的滑动距离。这是由于磁流变阻尼缓冲器中的粘滞阻尼项和惯性力项与相对速度和加速度相关。

图10 缓冲装置相对于基座的位移Fig.10 Displacement of the shocker absorber relative to the base
3种控制策略下缓冲器输出的总阻尼力如图11所示,总阻尼力峰值分别为 92.51、92.14、91.78 N,超调量分别为 2.79%、2.38%、1.98%。从图 11 可知,传统滑模控制抖振严重,采用本文控制策略后,抖振现象得到了抑制,而且阻尼力的峰值小于另外2种控制方法,且稳定输出值为90.03 N比单变量模糊的稳定值89.95 N更接近理想值90 N。以上两点说明了本文控制方法在跟踪理想输出和稳定值与理想值接近程度两方面的有效性。
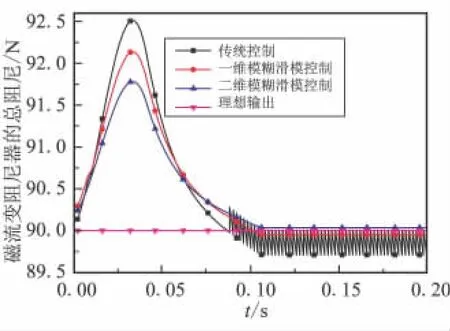
图11 磁流变阻尼器的总阻尼力Fig.11 Damping force of MR damper
4 结论
(1)本文将磁流变阻尼器用于航天器冲击减振,采用有限元与Lagrange方法,建立了含减振装置的飘浮基挠性航天器的刚柔耦合多体动力学模型,并开发了相应的计算程序。基于此模型,针对指数趋近律滑模控制,提出了将误差和误差导数作为输入的模糊控制方法,有效降低了分离推力对航天器的冲击。
(2)数值计算结果表明了磁流变缓冲装置对航天器缓冲的有效性。其中,缓冲装置显著降低了基座所受的冲击,而且降低了基座与挠性附件的耦合作用,使附件的速度和加速度变化更为平稳。
(3)与传统趋近律滑模控制方法和一维模糊滑模控制方法进行了仿真对比。结果表明,本文提出的控制方法提高了系统的动态品质,并有效抑制了系统的抖振。
[1] 舒燕,李志.在轨释放、分离载荷动力学仿真研究[J].航天器环境工程,2012(1):18-22.
[2] 沈晓凤,肖余之,康志宇.小卫星偏心分离动力学仿真模型的建立与验证[J].飞行力学,2012(3):258-262.
[3] Weiss K,Duclos T,Carlson J,et al.High strength magnetoand electro-rheological fluids[J].Society of Automotive Engineers,932451,1993.
[4] 张志勇,刘鑫,黄彩霞,等.具有参数不确定性的车辆座椅悬架输出反馈半主动控制[J].振动与冲击,2013(14):93-97,147.
[5] 涂奉臣,张洋,陈照波,等.采用磁流变阻尼器的整星隔振平台试验研究[J].振动与冲击,2012(21):33-36,40.
[6] 李赵春,王炅.火炮磁流变阻尼器试验分析与动态模型[J].振动与冲击,2012(1):64-67.
[7] 张步云,陈怀海,贺旭东,等.磁流变阻尼器减振特性实验研究[J].南京航空航天大学学报,2012(6):855-861.
[8] Chung J C Y,LIN C L.A transformed Lure problem for sliding mode control and chattering reduction[J].IEEE Transactions on Automatic Control,1999,44(3):563-568.
[9] Kuo T C,Huang Y J,Chang S H.Sliding mode control with self-tuning law for uncertain nonlinear systems[J].Isa Transactions,2008,47(2):171-178.
[10] Erbatur K,Kawamura A.Chattering elimination via fuzzy boundary layer tuning[M].Iecon-2002,Proceedings of the 2002 28th Annual Conference of the Ieee Industrial Electronics Society,2002(1-4):2131-2136.
[11] Wang J,Rad A B,Chan P T.Indirect adaptive fuzzy sliding mode control,Part I,fuzzy switching[J].Fuzzy Sets and Systems,2001,122(1):21-30.
[12] Wang S Y,Hong C M,Liu C C,et al.Design of a static reactive power compensator using fuzzy sliding mode control[J].International Journal of Control,1996,63(2):393-413.
[13] Gao W,Hung J C.Variable structure control of nonlinear systems,a new approach[J].Industrial Electronics,IEEE Transactions on,1993,40(1):45-55.
[14] 朱超.冲击载荷下磁流变阻尼器设计优化与控制算法研究[D].南京理工大学,2012.
[15] Shabana A A.Dynamics of multibody system[J].New York,Cambridge University Press,2005.
[16] 张永生,赵淑琴.船用蒸汽发生器水位的模糊自适应PID控制[J].中国舰船研究,2013,8(3):106-109.
[17] Rojas-Ramírez E,Benítez-Read JS,Segovia-De-Los Ríos A.A stable adaptive fuzzy control scheme for tracking an optimal power profile in a research nuclear reactor[J].Annals of Nuclear Energy,2013,58:238-245.
[18] Kun Jiang,Zhang Jing-gang,Chen Zhi-mei.A new approach for the sliding mode control based on fuzzy reaching law[A].Proceedings of the 4th World Congress on the Intelligent Control and Automation,2002(1):656-660.
[19] Kandel A,Langholz G.Fuzzy control systems[M].Florida,CRC Press Inc,1994.
猜你喜欢
疯狂英语·初中天地(2022年9期)2022-08-29
钻采工艺(2022年2期)2022-05-18
轻兵器(2022年3期)2022-03-21
铁道车辆(2021年4期)2021-08-30
电子技术与软件工程(2021年10期)2021-07-05
北京理工大学学报(2020年11期)2020-12-15
物理通报(2019年11期)2019-11-07
河南科技(2019年11期)2019-09-10
航天制造技术(2017年5期)2017-11-24
空间控制技术与应用(2015年3期)2015-06-05
