公路行车动力学仿真分析的研究
2013-12-18 07:25,,
石家庄铁道大学学报(自然科学版) 2013年4期
, ,
(1.海口市市政工程设计研究院,海南 海口 570100;2.石家庄铁道大学 土木工程学院,河北 石家庄 050043)
0 引言
公路工程主要是人-车-路-环境所构成的非常复杂的系统工程,行车安全性及乘车舒适性等是由人-车-路-环境的相互作用所决定的。公路线形一经确定就不能随便更改,而线形的优劣是公路设计及其作用的主要评价方法。在公路的运营期间,由于设计的缺陷和疏漏,往往造成公路几何特性与车辆行驶特性、驾驶员特性三者之间的不匹配,甚至出现事故多发路段(交通黑点)。据统计,2012年9月30日至10月7日长假期间,全国共发生道路交通事故68 422起,同比下降24.1%。涉及人员伤亡的道路交通事故2 164起,造成794人死亡、2 473人受伤,直接财产损失1 325万元。由可见此,对于公路线形的检验和评价应该首先着手于设计阶段,在设计完成以后,利用线形检验和评价方法,发现它的不合理之处进行及时改正,使得公路线形的投入和产出达到协调与统一。
鉴于汽车工程研发的车辆动力学仿真技术,对于机械工业中产品的“设计—样品—试验—修改设计”设计理念逐渐地受到重视,进行类似于工业产品那样的虚拟行驶试验,来评价道路线形组合设计的质量,而其发展则是一个缓慢的过程。Alan Nicholson[1]于1998年研究了公路平竖组合线形的一致性与汽车运行速度之间的关系;2007年李磊等[2]利用软件ADAMS/Car建立了汽车运动学模型和动力学模型,并进行动力学仿真分析,能较全面地评价和预测动力学性能;2010年朱亮亮等[3]采用ADAMS软件建立实体仿真模型,将理论计算和仿真计算的内容分析整理,为以后的公路设计与研究提供借鉴;2011年游克思等[4]利用MATLAB/Simulink建立了3自由度整车动力学模型,通过数值仿真模拟,分析了汽车在不同超高、纵坡坡度以及合成纵坡下的动力响应,在此基础上进一步分析了在不同车速以及前轮转角输入下,道路几何参数对车辆操纵稳定性的影响。
1 UM软件简介
Universal Mechanism软件由俄罗斯布良斯克国立理工大学(Bryansk State Technical University)的著名数学家、计算力学专家Dmitry Pogorelov教授带领的计算力学实验室开发,简称UM。它是一款非常优秀的通用多体系统动力学仿真分析软件,并具有轮式车辆、履带车辆、机车车辆、列车、轮轨磨耗和车桥耦合等诸多专用分析模块,已广泛应用于相关行业。
UM软件基于现代计算机辅助工程技术,从建模到仿真和后处理融合了许多优秀的算法和程序,从各个方面增强软件的实用性。UM使用简单方便。用户图形界面友好,设计非常人性化,将多体系统的数学模型都隐藏在程序内核,便于用户操作。同时,UM也是一个开放的系统,其良好的开放性和兼容性,便于与其他软件(如ANSYS、ADAMS/CAR等)联合使用,具有一套自己的程序风格和标准语言,可以根据相关语法就能做进一步的开发。
2 车辆-道路动力学模型
2.1 汽车动力学模型
UM中包含有一个特殊模块UM Automotive用于车辆动态分析。这个模块包括集成到程序核心的附加工具,还有特有的悬架和传动装置库(独立传递)。UM包括以下主要组件:道路几何形状生成与可视化;道路不平顺文件和功率谱密度文件库;道路微观外形(不平顺)生成与可视化工具;精确的轮胎力模型(轮胎与道路接触力);驱动模型;特有的动态实验装置。UM Automotive模块提供了两种驾驶员模型:MacAdam’s model和Second order preview model。轮胎参数在UM Simulation里设置,利用轮胎向导工具可以快速创建所需模型,用于表达模型参数存储文件为(*.tr)。UM Automotive模块中提供了两种车型:小客车与货车。本文主要研究的是公路平纵组合线形对行车动力影响,通过比较确定哪种线形是好的,从而能够满足人们日益增长的舒适性和安全性要求。因此,直接选用UM中的车辆模型进行车辆的动态仿真,并在必要时对模型进行了参数修改,而把重点放在了道路的平、纵、横组合设计过程中。车辆动力学模型主要有客车与货车,在仿真分析时主要采用vaz21_09模型,模型具体参数见表1。

表1 汽车vaz21_09模型主要参数参数数值参数数值车体质量/t1.269车轮摇头转动惯量/(kg·m2)2.5×10-1车体侧滚转动惯量/(kg·m2)4.0×102车轮横向阻尼/(kN·s·m-1)6.0×101车体点头转动惯量/(kg·m2)1.2×103车轮纵向阻尼/(kN·s·m-1)1.0×101车体摇头转动惯量/(kg·m2)1.2×103车轮垂向阻尼/(kN·s·m-1)3.0×101车体材料密度/(kg·m-3)7.8×103轮胎内宽/m1.5×10-1轮胎内直径/m5.6×10-1前轮轮距/m1.39轮胎截面高度/m1.2×10-1后轮轮距/m1.37轮胎截面宽度/m1.742×10-1轴距/m2.468车轮质量(除去转臂)/kg2.0×101车轮横向刚度/(kN·m-1)1.0×102车轮侧滚转动惯量/(kg·m2)2.5×10-1车轮纵向刚度/(kN·m-1)1.0×102车轮点头转动惯量/(kg·m2)5.0×10-1车轮垂向刚度/(kN·m-1)6.25×102
2.2 道路模型
UM Automotive模块中的路面工具包括两部分:Macrogeometry(用于宏观线路设计)和Irregularities(生成路面不平度)。顺着车辆的运行方向,即为道路纵断面的路面不平度,道路外形主要分为三种:宏观(长波)、微观(短波)和粗糙度(粗糙纹理)。本文道路模型的建立主要是运用纬地软件(道路三维动态可视化几何设计软件),并从运动学角度出发,结合影响平竖曲线组合的主要因素,考虑汽车速度变化的影响,建立相关的3D道路线形设计文件,通过离散平、纵曲线,并将离散点坐标转化为UM软件道路模型。
3 仿真计算
3.1 道路平纵横断面设计资料及参数
本汽车动力仿真试验采用的是海口市羊山路网一期工程项目(主干道北段)。道路起点为海口市绕城高速公路博片村路口处,本设计起点坐标为:X=204 627.916,Y=197 947.960(坐标系统为海南海口独立坐标系统),途径羊山地区本年度国际高尔夫球赛事项目区,终点与规划路在永兴镇段内衔接,本次设计终点坐标为(X=199 895.948,Y=192 877.071), 全长为9 405.025 m。在本设计中,道路红线宽度为30 m,按双向6车道设置。道路等级为城市主干道Ⅰ级,设计车速为60 km/h,最大纵坡为3.253%,最小纵坡为0.5%。为了在UM中建模的方便,将设计路段进行离散化,并选取其中特殊的一段(此段同时含有平曲线、缓和曲线、竖曲线以及超高的设置)进行汽车动力学仿真计算,具体用桩号表示为:K1+834.797~K4+534.797。将设计路段的平面设计资料利用纬地道路CAD系统软件进行重新设计,输出线形的逐桩坐标表,并将其用二维直角坐标系绘制出来,具体如图1、图2所示。

图1 仿真路段平曲线 图2 仿真路段竖曲线
由于本设计资料中的超高过渡是按三次抛物线渐变的,通过设计横断面资料可得汽车左右轮的超高,并对离散的点进行三次抛物线拟合,其得到的数据经过软件自动修正后如图3所示。然后通过点生成谱的方式,并且令谐波数分别等于10 000随机生成路段的左右轮不平顺,将超高与不平顺叠加导入UM中,经过UM自动修正后,生成仿真路段超高不平顺如图4所示。

图3 仿真路段超高修正图 图4 仿真路段超高不平顺
对于汽车仿真时的最大行车速度,取设计速度为60 km/h(16.7 m/s)。为了使仿真结果接近实际情况,通过统计身边开车驾驶人在转弯时的驾驶速度,合理确定该路段的行车速度,从而符合实际驾驶操作。另外,为了减小软件对超高修正的影响,起始路段采用匀加速模型,而曲线路段的车速适当降低为36 km/h(10 m/s)。根据车速变化计算出各段行驶时间得到时间与速度关系如图5所示。

图5 汽车行驶速度图
3.2 动态仿真分析
由于实际工程中道路同侧内采用的是单向横坡形式,因此仿真时将道路模型简化为单车道形式。通过对上述数据及参数的设置后,汽车动态仿真时采用MacAdam驾驶员模型,参数Preview time取为1 s,Reaction time delay取为0.1 s,Neuromuscular lag取为0.1 s,Number of control steps取为4。首先需要得出横向合成加速度的数据,然后利用2D Curve editor求导解出横向加速度变化率的数据,横向合成加速度值为其空间向量的模,即X、Y、Z轴加速度投影的模的平方和的二次方根。而其指向可以通过Animation Window实时监控,非常方便。
汽车某时刻的行驶状态,经过一系列的汽车动力学仿真,首先得到路段的各加速度在坐标轴上的投影变化图以及x轴、y轴和z轴加速度合成图,即模m方向的加速度图,如图6所示。
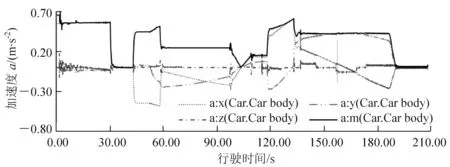
图6 路段仿真分析结果数据图(忽略不平顺)
通过分析图6可以得出以下结论:平纵横合成加速度值除了初始阶段(主要是由于UM软件对超高的自动修正,此段无实际意义可以忽略),其余段均小于0.6 m/s2,采用文献[5]的横向力加速度标准来评价舒适性,发现道路设计成果的动态性能比较好。路段内,平纵横合成加速度出现拉升的位置基本上都是汽车加减速与匀速突变的位置。由于车辆运行时与x、y轴成一定的角度,因此,从图6中可以发现在直线路段上,x轴向加速度和y轴向的加速度要受到路拱坡度的影响,产生的加速度分别向各轴进行投影,在曲线段内,这种影响尤为明显。此外,将上述图中两个路段的平纵横合成加速度对时间求导,得到了合成加速度变化率图形,具体如图7所示。

图7 仿真路段合加速度变化率(忽略不平顺)
从图7中可以看出,在加减速路段与匀速路段交接的位置加速度变化率很大,影响了乘车的舒适性。图7中虽然将超高修正段的数据设为0,但是由于车辆行驶过程中,相邻的曲线段之间存在耦合的特点,受修正段的影响,其相邻段内的加速度变化率也是比较大的。而在路段尾端由圆曲线进入缓和曲线、由缓和曲线进入直线时,加速度变化率虽然比较小,但是波动还是比较密集的。另外,由于路段一在中间两段缓和曲线之间没有加入直线段,从图7中可以发现拐点之后的加速度变化率波动很大,直接影响了乘车的舒适性。
以上是在没有加入不平顺的情况下分析得到的结果,而实际情况,道路是存在不平顺的,因此,在动力仿真时加入一定的不平顺更符合实际情况,具体仿真结果如图8所示。
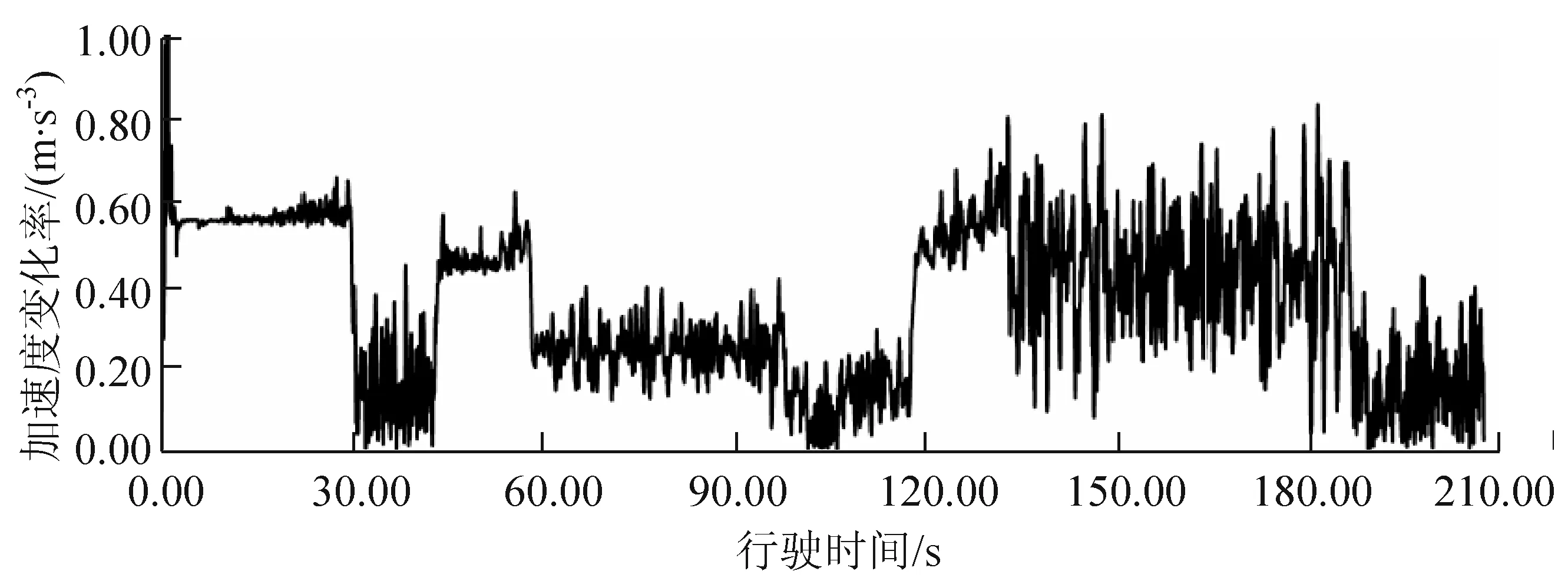
图8 仿真路段合成加速度变化(考虑不平顺)
从图8中可以看出,在超高加入不平顺之后,各轴向加速度都出现了不同程度的波动,尤其是竖向加速度波动最为明显,而纵横轴向加速度虽然有一定的波动,但是基本上都是在未加不平顺的加速度曲线上下一定范围内波动,其中在曲线路段,不平顺使得各加速度的波动显著增大。所以,实际公路运营期间,当曲线路段出现问题时,要及时进行修整,否则会造成严重的不良后果。此外,汽车行驶时还可以对其轮胎的受力与滑动进行监测,对公路线形存在不合理的位置进行修改,减小车辆的损耗,进而提高汽车行驶的安全性和稳定性。
4 结语
将公路线形设计软件与汽车动力仿真分析软件进行结合,应用纬地道路CAD系统软件将前人进行研究应用的公路资料,重新设计,并得到平纵横线形数据资料,将其编辑成UM软件中仿真时所需要的文件,完成道路模型的建立。从2010年中国市政工程中南设计研究院设计的海口市羊山路网一期工程项目(主干道北段)设计资料中,选取了一段线形特殊的道路,进行仿真分析,用平纵横合成加速度及其变化率为评价指标进行了相关的分析。在仿真分析时考虑了路面的不平顺,利用UM软件随机生成了不平顺,并与超高相叠加得到左右轮不平顺文件。在汽车动力学仿真时,加入不平顺来研究组合线形的舒适性问题。由于本人时间和能力有限,动力仿真分析时采用的是UM中现有的车辆模型,研究时会产生一定的误差,所以,对于车辆模型方面,有待于车辆工程等专业的研究人员建立我国现实情况下的车辆模型。在道路模型方面,仿真时采用的是刚性路面,从而忽视了实际中路面对车辆的减震作用。如果车辆通过道路时,路面能够产生相应的变形,此时的结果将更加符合实际。不过对于刚性路面来说,如果进行水泥路面的仿真分析还是比较符合实际情况的。
参 考 文 献
[1]ALAN NICHOLSON. Super elevation, side friction and roadway consistency[J].Journal of Transportation Engineering, 1998, 124(5): 411-418.
[2]李磊, 任勇生, 孙爱芹. ADAMS/Car在汽车动力学仿真分析中的应用[J]. 现代制造技术与装备, 2007(1): 25-27.
[3]朱亮亮, 李向国, 李木松. 高速公路平竖曲线组合行车舒适性研究[J].石家庄铁道大学学报:自然科学版,2010, 23(3): 68-72.
[4]游克思, 武加恒, 孙璐,等.道路几何参数对车辆操纵稳定性影响[J]. 公路交通科技, 2011, 28(10): 109-117.
[5]伍剑奇.高速公路行车舒适性评价研究[J].华东公路, 2009(6): 61-62.
猜你喜欢
工会博览(2022年5期)2022-06-30
中国交通信息化(2021年2期)2021-07-22
铁道建筑技术(2021年3期)2021-07-21
西部交通科技(2021年9期)2021-01-11
装备制造技术(2020年2期)2020-12-14
建材发展导向(2019年11期)2019-08-24
今日农业(2019年12期)2019-08-15
中国塑料(2015年1期)2015-10-14
Asian Herpetological Research(2014年3期)2014-03-25