
基于电动汽车稳定性控制研究
2013-12-04 03:03:28应世明张宏双
北京汽车 2013年1期
段 敏,应世明,张宏双
Duan Min, Ying Shiming, Zhang Hongshuang
(辽宁工业大学 汽车与交通工程学院,辽宁 锦州121001)
通过对车辆的横向运动、纵向运动和横摆运动的有效控制,可以实现汽车的稳定性。文中采用了模糊逻辑横摆力矩的控制方法,其优点为:模糊控制器的设计不需要精确的数学模型;模糊逻辑控制展示了鲁棒性强的特点;该算法便于使用计算机软件实现。1
1 整车模型动力学计算
鉴于建立的模型对文中研究的电动汽车横摆力矩的重要性,选择 7自由度整车,在建模时忽略了汽车的扭振、摆振运动。该模型包含汽车的横向运动、汽车的纵向运动、汽车绕z轴的横摆运动及4个车轮的转动共7个自由度。其动力学方程如下:
汽车的纵向力平衡方程
式中:δ为转向盘转角;vx为汽车的纵向车速;vy为汽车的侧向车速;γ为横摆角速度;Fxi为轮胎纵向力,Fyi为轮胎侧向力(其中i =1、2、3、4,分别对应4个车轮);m为整车质量;tw1为前轴轮距;t为后轴轮距;d=为平w2均轮距;h为质心到地面的距离;Iz为汽车绕 z轴的转动惯量;lf和lr分别为车辆质心到车轮前、后轴的距离。
2 动力学控制目标的模型建立
电动汽车在水平路面上以较小的加速度转弯时,车辆的操纵特性在驾驶员的控制范围内,驾驶员的操纵特性可用单轨模型(2自由度)来描述。因此,理想的线性2自由度车辆模型被视为汽车稳定性控制的主要目标。车辆动力学控制目标主要有期望的汽车质心侧偏角及期望的横摆角速度[1]。本研究把期望的汽车质心侧偏角选为零,采用基于线性2自由度汽车模型的横摆角速度计算方法,即车身的横向平移运动,横摆运动2个自由度。电动汽车模型的动力学方程如式(5)、(6),文中设计的动力学控制目标是输出驾驶员所需要的横摆角速度和质心侧偏角,根据运动学方程建立横摆角速度模型,如图1。
3 稳定性控制策略
在建立汽车理想模型后,为确保电动汽车不失去稳定性,电动汽车上安装了能够实时监控车辆的动力学数值传感系统。当被监测的车辆实际参数与设定的动力学目标参数不同时,直接横摆力矩控制器能够依据设计的模糊规则求出汽车稳定时所需要的补偿横摆力矩的大小,将计算的力矩通过驱动电机把转矩传送到 4个车轮,以获得目标横摆力矩[2-4]。
3.1 横摆力矩控制器的结构
采用两输入单输出的控制系统结构,输入分别为质心侧偏角的误差、横摆角速度误差,输出为车辆稳定时的补偿横摆力矩 Mzf,如式(7)、(8)。
式中:e(β)为质心侧偏角误差;e(γ)为横摆角速度误差;βd为质心侧偏角的期望值;γd为期望的横摆角速度;γ为传感器反馈的横摆角速度;β 为电动汽车反馈信号路面估计的质心侧偏角。
3.2 输出和输入隶属度函数
依据隶属度函数的制定规则,选择三角形隶属度法,分别制定横摆力矩控制器的输入与输出变量的隶属度函数。模糊控制器的输入变量为e(β)和e(γ),其基本论域分别为[-0.1,+0.1]和[-5°,+5°]。输出变量为 Mzf,其基本论域为[-3000,+3000]。输入语言变量的模糊子集为{NB,NM,NS,ZE,PS,PM,PB},输出语言变量的模糊子集为{NVB,NB,NM,NS,ZE,PS,PM,PB,PVB},其中,PVB代表正极大,PB代表正大,PM代表正中,PS代表正小;ZE代表零;NVB代表负极大,NB代表负大,NM代表负中,NS代表负小。
模糊控制器采用 IF-THEN语句规则形式的Mamdani模糊推理系统,其控制规则如表 1所示,图2是稳定性控制器与 Simulink软件建立的连接。
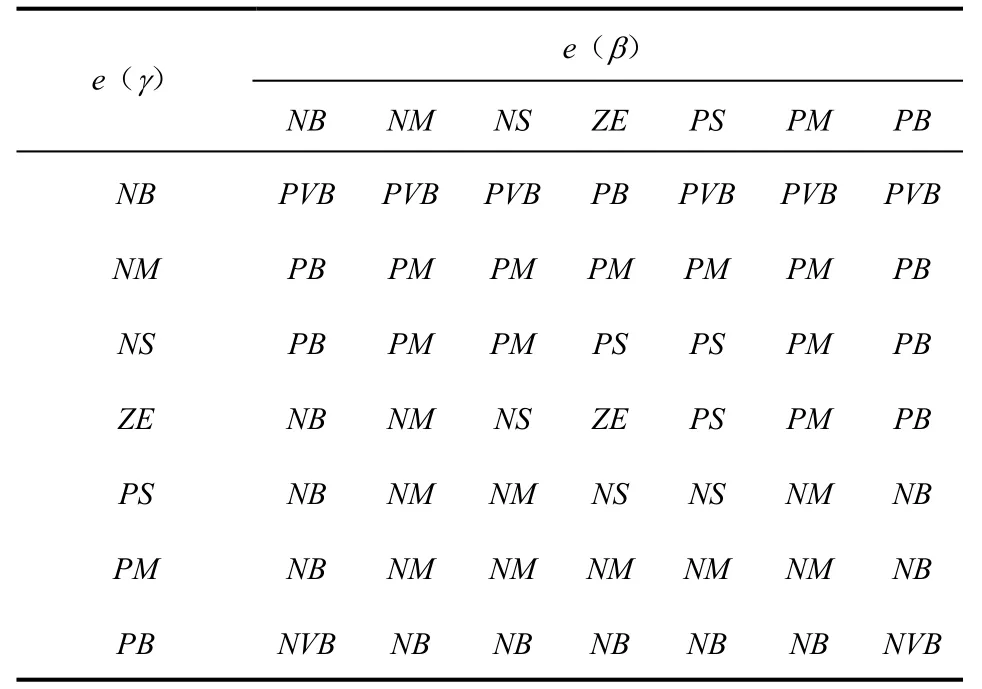
表1 模糊逻辑规则控制表
4 仿真结果分析
为了验证电动汽车在行驶过程中所制定的控制器是否稳定,基于前面建立的 7自由度车辆仿真模型,结合Matlab/Simulink软件进行仿真分析,比较电动汽车在不同极限工况下车辆有控制器和无控制器作用时车辆的稳定性。
1)车辆在低附着系数路面上以40km/h的车速行驶,对转向盘进行阶跃输入操作。图3、图4表示工况 1中未受控车辆与采用横摆力矩控制器控制的仿真结果。
从图3、图4可以看出,在施加转向盘转角后,有控制器车辆的横摆角速度能够按照期望横摆角速度方向行驶,没有采用控制策略的电动汽车的横摆角速度与目标横摆角速度偏差随着时间不断变大;未加控制策略的电动汽车的质心侧偏角与理想车辆质心侧偏角的偏差较大,而有控制的电动汽车在补偿横摆力矩的作用下质心侧偏角与期望值的偏差变化范围很小,车辆一直处于稳定状态。
2)车辆在低附着系数路面上以40km/h 的车速行驶,对转向盘进行正弦输入操作。图5、图6是工况 2中采用控制器的车辆与未受控汽车对比的仿真结果。
从图5、图6可以看出,施加控制的车辆质心侧偏角与未受控车辆相比,在前轮转角最大时刻汽车的质心侧偏角大大降低,未安装控制器的电动汽车不能随着前轮转角的变化而做出响应,其横摆角速度有延后的现象。安装控制器的汽车轮毂电动机能够对车辆转向盘转角做出迅速响应,汽车的实际横摆角速度能够很好地跟踪期望的汽车横摆角速度,提高汽车的行驶稳定性。失去控制,汽车失去稳定性;而施加横摆力矩控制的汽车能够按照转向盘转角的轨迹行驶,并且横摆角速度和质心侧偏角变化很小,大大提升了汽车的侧向稳定性。
5 结 论
基于车辆反馈的实际质心侧偏角和横摆角速度跟踪目标值的控制方法,建立了 7自由度整车动力学仿真模型,制定的横摆力矩控制器能输出稳定车辆的补偿横摆力矩值,从而修正车辆行驶姿态。仿真结果得出:没有施加控制策略的电动汽车的横摆角速度及质心侧偏角变化范围很大,汽车失去稳定性并脱离行驶轨道,驾驶员对汽车
[1]Jeongmin Kim,Hyunsoo Kim.Electric Vehicle Yaw Rate Control using Independent In-Wheel Motor.Power Conversion Conference.Nagoya,Japan:IEEE Press,2007:705-710.
[2]石辛民,郝整清.模糊控制及其 MATLAB仿真[M].北京:清华大学出版社,2008.
[3]赵治国.车辆动力学及其非线性控制理论技术的研究[D].西安:西北工业大学,2002.
[4]吴义虎,宋丹丹,侯志祥,等.车辆横向稳定性的模糊控制仿真[J].长沙理工大学学报(自然科学版)2007,4(2):49-53.
猜你喜欢
汽车实用技术(2022年14期)2022-07-30 06:24:26
北京航空航天大学学报(2021年4期)2021-11-24 01:13:12
民用飞机设计与研究(2020年4期)2021-01-21 09:15:46
新课程·中学(2019年7期)2019-09-17 13:41:15
物理教学探讨(2018年1期)2018-02-13 09:26:52
中学生数理化·高一版(2017年3期)2017-07-08 11:55:27
火控雷达技术(2016年1期)2016-02-06 02:18:01
中国铁道科学(2015年4期)2015-06-21 06:46:06
航天器工程(2014年5期)2014-03-11 16:35:53
铁道建筑(2010年11期)2010-07-30 02:04:04
