
越野车EPS用开关磁阻电动机的参数设计与有限元分析
2013-12-04 03:03:28许艳梅张栋省王海亮
北京汽车 2013年1期
许艳梅,张栋省,王海亮
Xu Yanmei1,Zhang Dongsheng1,Wang Hailiang2
(1.重庆交通大学,重庆,400074;2.大连理工大学,大连,116023)
0 引 言
在国内,电动助力转向系统(EPS)主要应用在普及型轿车上,在越野车上的应用还很少。因为越野车行驶路况较差,滚动阻力大,所以需要的转向力也大。EPS用电动机具有多种类型,各有优缺点。开关磁阻电动机(SRM)具有结构简单坚固、工作可靠、在低速时能输出高转矩等诸多优良特性,而且SRM电动机单位体积输出功率是异步电动机或直流换向电动机的2~4倍[1]。研究表明1个四相8/6型SRM驱动能够为齿条助力式EPS提供最大10 kN的力[2]。随着SRM系统和42V电压系统的发展,EPS在越野车上的大规模应用将成为可能。因此,文中以越野车用EPS开关磁阻电动机为研究对象,采用Ansoft软件对其进行本体设计和有限元分析。
1 开关磁阻电动机的结构设计
开关磁阻电动机的结构有多种类型,除了常规结构外,还有盘式结构、滚动转子结构、外转子结构和定转子极数相等的结构等。最常用的结构有三相6/4极、三相12/8极、四相8/6极等,文中选用具有正反方向自启动能力、常规结构的三相6/4极开关磁阻电动机为研究对象。根据越野车电动助力转向系统的需求,开关磁阻电动机的额定参数如表1。
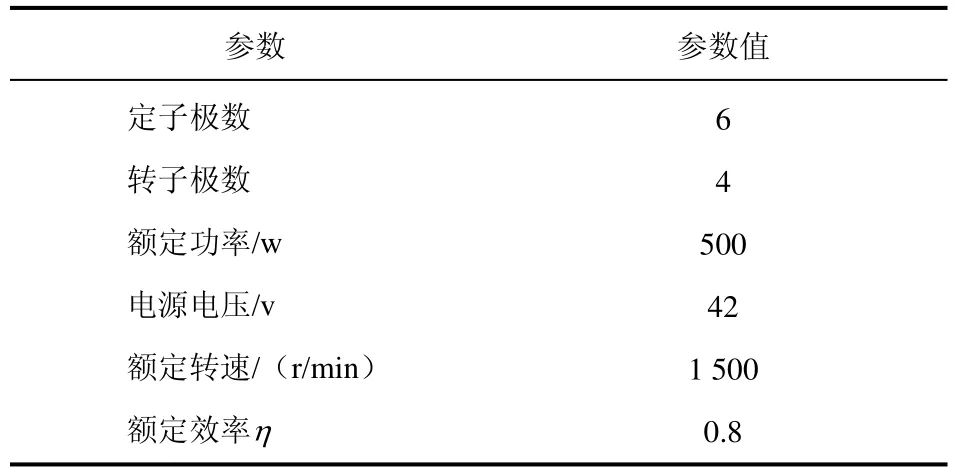
表1 电动机的基本参数
根据经验公式和电动机的基本参数来计算电动机结构的初始尺寸。
1.1 电动机的主要尺寸计算[3]
1)电磁功率Pem
2)细长比λ
式中:ℓa为铁心长度;Da为转子直径。参照中小型交流电动机的经验数据,λ的取值一般为0.5~3.0。
3)转子外径Da
式中:ki为绕组电流系数,ki=0.48~0.51;km为方波电流系数, km=0.8。对中小型SRM电动机,电负荷A的取值范围为A=15000~50000A/m,三相6/4极SRM电动机的磁负荷为Bδ=0.3~0.6T。
4)定子外径Ds
根据各种规格和功率产品统计,定、转子外径的比值范围为
1.2 电动机的其他结构尺寸[3]
1)定、转子极弧βs、βr
定、转子极弧的确定,应保证对任何转子位置,SRM电动机均具有正、反方向的自启动能力。因此,当某一相定、转子极处于极对极时,相邻相定、转子极必须有一定的重叠。所以极弧满足的必要条件为
2)定、转子极弧系数βns、βnr
式中:bps为定子极宽;bpr为转子极宽;τs为定子极距;τr为转子极距。
3)定、转子轭高hcs、hcr
4)轴径Di
根据经验公式计算的主要结构尺寸如表2。在电动机的设计初期,这些结构参数只是初选值,电机的几何尺寸、绕组匝数、线规等参数都无法准确给出,需要用RMxprt模块进行参数化分析和优化计算,经过反复计算和多方案对比后才能确定主要的尺寸。

表2 电动机的主要尺寸
2 开关磁阻电动机模型的建立及有限元分析
文中主要应用Ansoft机电系统中的RMxprt和Maxwell2D模块。RMxprt为旋转电动机设计软件,包含多种电动机模型,根据RMxprt中开关磁阻电动机模型建立二维电动机模型,RMxprt除具有最基本的校核功能外,还具有参数分析和优化设计功能。Maxwell2D是一种功能强大、结果准确、易于使用的二维电磁场有限元分析软件,包括电场、静磁场、涡流场、 瞬态场、交变电场等分析模块,可以用来分析电动机的静态、稳态和瞬态特性。
2.1 RMxprt电动机模型的建立
根据初始值生成的电动机二维模型,如图 1(a),对其进行电磁计算分析,性能特性并不满足要求,必须通过优化电动机的结构参数来提高电动机的性能特性。对SRM性能影响较大的结构参数主要有定、转子外径,定、转子极弧系数,定、转子轭厚度和气隙大小等。在RMxprt中,根据电流密度、槽满率、磁通密度等一些约束条件和电动机的性能,对电动机的主要结构进行参数化分析。每个参数的取值范围为初始值的80%~120%,组合成多种不同的方案,然后对其进行反复计算和比较,最后确定方案的优化值如表2,二维模型如图1(b)所示。
对优化后的模型进行计算,仿真结果给出电动机的性能参数和性能曲线。结果显示:槽满率ks为65%;对于手工下线,要求ks<80%;对于机器下线,要求ks<70%;电流密度J为7.8 A/mm2,一般要求 J<6 A/mm2;对于短时工作的电动机,J=8~9 A/mm2。EPS用电动机只是在需要助力的情况下工作,属于短时工作的电动机,电流密度符合要求;定子极的平均磁通密度为1.77 T,转子极的平均磁通密度为1.43 T。为了降低铁耗,要求定子的平均磁通密度低于1.8 T,转子的平均磁通密度低于1.5 T;相电流为14.6 A,输出功率为500.9 W,额定转速为1500.6 r/min,额定转矩为3.18 Nm。根据结果分析,设计的电动机基本满足要求。
图2为电动机的磁链波形,可以看出磁链不仅随电流的大小变化,也随转子位置角的变化而变化。磁链与电流成非线性关系,电流不变时,磁链随着位置角的增大而增大。
图3为相电感曲线图,定子极与转子极完全重合时,相电感最大;转子槽与定子极重合时,相电感最小。
图4给出电动机的主要特性曲线,可以看出整个电动机的启动过程和主要参数随转速的变化规律。从电流转速曲线和转矩转速曲线可以看出,开关磁阻电动机的启动转矩和启动电流很大,因此在启动期间一般采用电流斩波控制方式限制启动电流的幅值。
2.2 电动机模型的有限元分析
采用Ansoft自身的接口将RMxprt生成的电动机模型一键导入到二维瞬态场中,软件会自动加载几何模型并定义各部分的材料,同时给出电动机的边界条件、激励源和网格划分等,并自动给出电动机的外接电路,然后对电动机进行瞬态场分析,查看分析结果。
图5为电动机A相绕组的电流和磁链曲线图,可以看出电流的导通周期为90°,每隔30°就有一相导通。且磁链随着电流的变化而变化,从而验证了图2的结论。经过后处理得出电流有效值为14.67 A,与RMxprt计算的额定电流相比,电流误差为0.7%。
图6是电动机在额定转速时的转矩曲线,在一个电周期内,可得平均转矩为 3.24 Nm,与RMxprt的计算结果相比,误差为1.8%。通过相电流和电动机转矩的横向对比可以看出,RMxprt模块和Maxwell2D计算的结果极为接近,可以相互验证计算结果的准确性。
图7给出了不同时刻的电动机磁力线和磁密分布图,3个时刻的转子位置角分别为60.6°、88.5°和120°。从这 3个图可以看出,相绕组按顺时针方向依次通电,则转子逆着励磁顺序以逆时针方向旋转。从磁力线可以看出,因磁场的扭曲产生切向拉力使转子转动。由此验证了开关磁阻电动机的工作原理。可以看出该仿真模型的磁路是正确的,说明优化后的SRM结构参数是合理的。
3 结 论
通过对 RMxprt的磁路计算结果和Maxwell2D有限元分析的结果分析,证明文中设计的开关磁阻电动机结构是合理的,基本上满足要求。如果要将此开关磁阻电动机应用于 EPS中,还需要对其进行优化设计和控制系统的研究,此设计结果可以为电动机的优化设计和控制系统的研究提供理论依据。
[1]吴红星.开关磁阻电机系统理论与控制技术[M].北京:中国电力出版社,2010.
[2]Carlos Moron,Enrique Tremps,Puerto Ramirez,Alfonso Garcia.Performance optimization in switched reluctance motor drives[J].Key Engineering Materials Vol.495(2012):67-70.
[3]吴建华.开关磁阻电机设计与应用[M].北京:机械工业出版社,2000.
猜你喜欢
防爆电机(2021年4期)2021-07-28 07:42:56
防爆电机(2021年4期)2021-07-28 07:42:46
上海大中型电机(2021年2期)2021-07-21 03:01:32
防爆电机(2021年1期)2021-03-29 03:02:46
测控技术(2018年2期)2018-12-09 09:00:52
电子设计工程(2017年20期)2017-02-10 03:40:05
智能建筑电气技术(2015年5期)2015-12-10 05:52:25
智能建筑电气技术(2015年5期)2015-12-10 05:52:20
电机与控制应用(2015年10期)2015-03-01 03:50:16
电机与控制应用(2015年1期)2015-03-01 03:49:08
