
结构动位移测试的计算机视觉方法实现
2013-12-02 07:42季云峰
同济大学学报(自然科学版) 2013年11期
季云峰
(同济大学 土木工程学院,上海200092)
随着工程结构柔度的不断增大和复杂结构模型试验研究的发展,如大跨度桥梁、高层建筑等的现场测试以及结构振动台试验、风洞试验等,结构动位移的测试显得尤为重要.目前的工程应用中,结构动位移的传统测试设备包括加速度计、线性位移计(包括挠度计)、全球定位系统(GPS)等.传统测试手段主要是进行接触式测量,即需要将测试仪器固定或贴紧在所测结构表面,这给实际应用带来许多安装困难.同时,传统动位移测试方法在需进行多点、三维测量时,往往缺少现场操作的灵活性且费用较高.
计算机视觉是研究计算机模拟生物外显或宏观视觉功能的科学与技术,其通过视觉传感器(如相机或摄像机等)来分析三维空间物体的二维图像,经过图像计算,可以进一步重构实物的三维几何信息,包括形状、位置、运动等[1].因此,在土木工程领域,采用计算机视觉技术实现结构动位移的测试是可行的,且其测试方式是非接触式的.目前,国内外文献关于计算机视觉在结构动位移测试中的研究主要集中于单相机、单点、单向的动位移测试,且大部分研究采用的是费用十分昂贵的量测型相机或者相机标定过程仅适用于其研究本身[2-8].因此,已有文献基于计算机视觉的动位移测试技术缺少工程应用的通用性,即未将该测试方法系统化.本文以计算机视觉的基本原理为理论基础,采用两台商用消费级相机作为测试工具,避免了复杂的相机参数标定过程和高昂的测试成本,研究出了能灵活地进行多点、多维、非接触式动位移测试的新方法.
1 相机参数标定
在计算机视觉中,相机参数标定是指确定表征相机测量能力的数学参数的过程,这些参数能直接反映二维图像点与三维空间点间的计算关系.相机成像的过程在数学上被称为透视投影,通常可采用针孔模型来描述,其数学表达式为[9]

式中:m=(u,v,1)T为以齐次坐标形式表达的图像点二维坐标;M=(X,Y,Z,1)T为m对应的三维空间点的齐次坐标;λ为比例因子;P为投影矩阵;K为相机标定矩阵,它包含了五个相机内部参数αx,αy,s,u0及v0;R为3×3的坐标变换的转动矩阵(含三个转角参数);t为坐标变换的平动列向量(含三个平动参数);I为3×3的单位矩阵.可见,若要标定单个相机的11个参数,则需至少六个已知点的空间和图像坐标值.
采用非量测型相机作为动位移测试工具,可避免量测型相机复杂的预先标定过程和昂贵的费用[10],同时,为了进一步提高现场位移测试的使用灵活性,利用计算机视觉中的平面相机标定方法来对相机进行现场标定[11].该相机标定方法采用转动如图1所示的黑白方格平板来进行单个相机的参数标定,每个小方格尺寸均为30mm×30mm.假定在某一固定焦距下,相机在不同角度拍摄了方格平板的n张图像,每张图像上有l个角点,考虑到矩阵K在标定过程中为不变量(焦距固定),且所有空间点均共面,根据式(1)和(2)有

式中:mij=(uij,vij,1)T,Mj=(Xj,Yj,0,1)T,i=1,2,…,n,j=1,2,…,l.若设m~ij为所得第i张图像上第j个角点的实际图像坐标,则单个相机的参数可由以下优化公式求得:

式中:‖‖为两点间的距离.
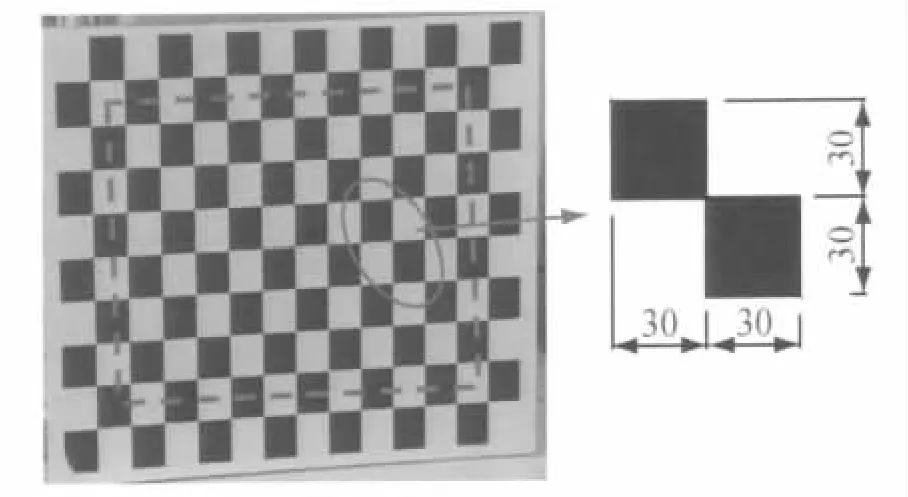
图1 用于相机标定的黑白方格平板(单位:mm)Fig.1 Planar pattern with black and white squares used in camera calibration(unit:mm)
2 图像点跟踪
图像点跟踪是基于立体视觉的结构位移测试方法中的重要环节.在图像(或视频)分析过程中,点跟踪的精度会直接影响位移测试的最终结果.在实际测试中,本文采用两个黑方格组成的目标模板(黑色方格打印在白纸上,见图2a)粘贴在所测结构的表面,方格尺寸均为30mm×30mm,两方格的交叉角点作为图像分析的跟踪点.
图2为下文简谐振动试验中的图像点跟踪过程,具体包括以下步骤:①采用边缘检测技术对目标方格进行二值图像处理(见图2b);②利用二值图像骨架的交点来提取潜在的特征点;③通过图像匹配方法剔除掉明显非交叉角点的特征点;④在二值图像上提取最可能的角点,确定其图像坐标值;⑤最后,根据Harris角点检测算法[12],以步骤④所得角点坐标作为初始值,在原始真彩图像上进行角点优化计算,最终得到目标中两方格交叉角点的亚像素坐标值.

3 三维点重构
采用两台固定位置的相机进行结构动位移的测试,在两台相机的所有相机参数和所拍摄的图像跟踪点都确定完成后,最后一个重要环节就是三维点重构,即得到实测结构上目标点的三维坐标值.三维点重构可采用计算机视觉中的非线性三角测量法进行.设三维空间点M=(X,Y,Z,1)T在两相机平面的图像点分别为m(1)=(u(1),v(1),1)T,m(2)=(u(2),v(2),1)T,由式(1)有

式中:上标代表相机序号.式(1)可整理成如下形式

式中:p(j)i为第j个相机投影矩阵P中第i行的行向量.式(6)为共含三个未知数的齐次方程组,则空间点的三维坐标(X,Y,Z)即为其最小二乘解.根据计算机视觉原理,将上述最小二乘解作为初始值,并通过下列目标函数(7)进行非线性优化求解,进一步找到三维坐标的最优值.

4 试验验证
为了验证基于计算机视觉的结构动位移测试方法的实际准确性,从不同振动形式的角度设计了平面简谐振动、悬臂梁自由振动和框架模型振动台试验.试验配备两台逐行扫描的高清摄像机,图像(视频)像素为1 280×720,摄像机视频采用频率为30 fps,10倍光学变焦能力(5.2~52.0mm).结构振动视频分析、相机参数标定、图像点跟踪及三维点重构的具体实现均采用自编的Matlab程序执行.
4.1 平面简谐振动试验
首先进行单向简谐振动试验,图像跟踪模板固定在振动台的表面,两台相机距离振动台约2m,相机之间的角度约30°(见图3).需要指出的是,根据前文所述的立体视觉原理,只要两台相机能够足够清晰地拍摄到模板的振动,相机与被测结构角度的影响并不重要.试验采用三种不同的焦距进行测试,分别为5.2,15.6,20.8mm.两台相机首先进行单相机标定和立体标定,标定结果显示,在静态情形下,空间点重构的误差在上述三种焦距设置下分别为0.44,0.22,0.13mm.可见,在图像保证清晰的情况下,焦距越大,测试精度越高.

相机标定完成后,给振动台设定沿X方向的不同频率的简谐振动(一维正弦振动),相机采用三种不同焦距进行测试.振动频率设置分别为1和5Hz,振动幅度均为20mm.图4为计算机视觉方法实测结果和振动台控制位移的比较图(以20.8mm 的焦距设置为例),表1列出了实测动位移时程测试误差(图1中目标模板角点处)的均值和方差.从表1可见,各对应时刻点位移测试结果的均值基本在0.25~0.30mm 之间,方差值随着结构振动频率的增加有所增大,其绝对值在0.37~0.91 mm 范围内.测试数据方差增大的原因可归结于频率增大导致的图像模糊和点对应关系所存在的误差.
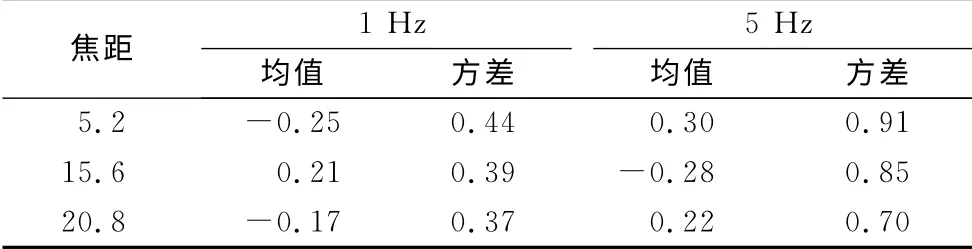
表1 动位移测试误差的均值和方差Tab.1 Means and standard deviations of dynamic displacement measurement errors mm
为了进一步验证计算机视觉方法用于简谐位移测量的可靠性,设置振动台进行二维平面振动,振动幅值为100mm,频率为1Hz.平面振动的X坐标为正弦振动,Y坐标为相同幅度和频率的余弦振动.计算机视觉的测试结果见图5.试验结果显示该方法可以非常准确地用于二维动位移的测试,其测试误差最大为0.4mm.
4.2 悬臂梁自由振动试验


图6为计算机视觉方法进行悬臂梁自由振动位移测试的试验装置图,悬臂梁长约530mm,材质为铝,方格目标模板粘贴离固定端约270mm 处.试验采用的相机和相机标定方法均与上述简谐振动试验相同.测量时两台相机距悬臂梁的距离约为2.5m,两者间的角度约30°,两台相机的焦距设置为15.6 mm.为了评估立体视觉结果的准确性,试验采用激光位移计进行同步测量,如图7所示.图7给出了两种测量方法所测得的悬臂梁在初始位移作用下自由振动位移时程.由图7可见,立体视觉方法的测量结果与激光位移计的测试结果十分吻合,在自由振动最大幅值处两者的测量误差仅为0.3mm.
4.3 三层框架模型振动台试验
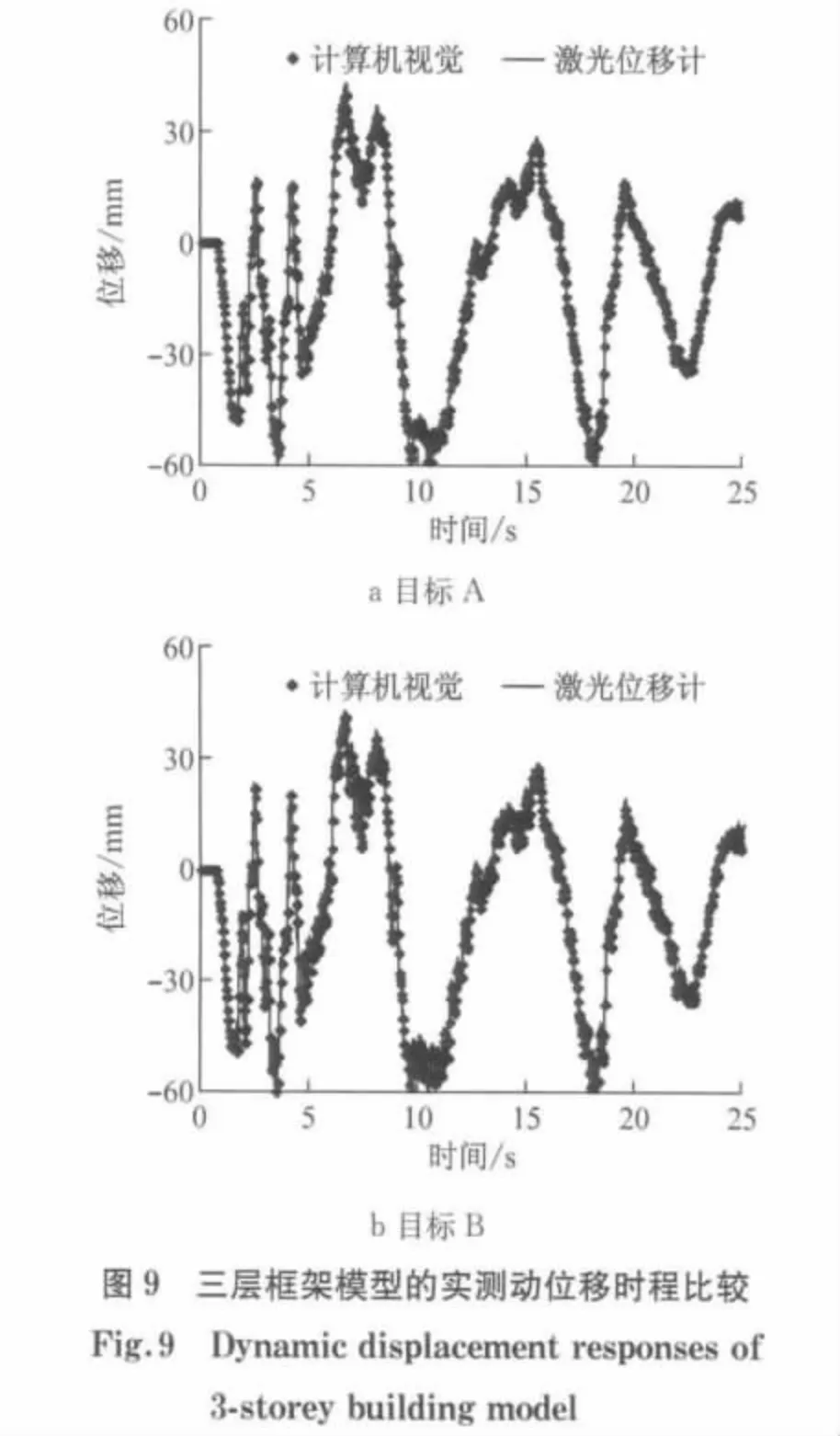
该试验是将计算机视觉方法用于振动台试验,目的是评估该方法测试结构在随机激励下动位移响应的准确性.三层框架模型由铝质构件组成,每层高0.38m,模型总体高度为1.2m,试验装置示意图见图8.若干个方格目标模板粘贴在框架表面用于动位移的测量,图中激光位移计用于动位移测试结果的比较.两台相机的布置与图3所示相同.振动台的激励采用的是1940年El Centro地震波(一维NS分量).图9显示出了目标A 和B在地震激励下的实测动位移时程.可见,与激光位移计的测试结果相比,立体视觉方法同样能够非常准确地捕捉模型的动位移响应,两种测试方法在振动最大幅值处的测量误差仅为0.28mm.

图8 三层框架模型振动台试验装置示意图Fig.8 Experimental setup of 3-storey building model
5 结语
本文提出的基于计算机视觉技术的结构动位移测试方法能灵活地进行多点、多维、非接触式测试,具备一定的通用性,是对传统动位移测试方法的很好补充.该方法主要包括以下关键技术:相机参数标定、图像点跟踪及三维点重构.采用了简谐振动、自由振动和随机振动(振动台地震激励)试验验证了计算机视觉方法进行结构动位移测试的准确性,试验结果均显示该方法能够非常准确地捕捉结构的动位移响应,基本满足土木工程结构动位移测试的一般要求.尽管该方法得到了试验验证,但上述试验均为小规模的实验室试验,存在一定的应用局限性.因此,若将本文提出的动位移测试技术推广到既有结构的现场测试,一些关键问题尚需进一步完善,如结构表面光线的影响、相机振动问题、拍摄距离导致的图像解析度降低等.
[1] 艾海舟,武勃.图像处理分析与机器视觉[M].北京:人民邮电出版社,2003.AI Haizhou,WU Bo.Image processing analysi and machine vision[M].Beijing:Posts and Telecom Press,2003.
[2] Olaszek P.Investigation of the dynamic characteristic of bridge structures using a computer vision method[J].Measurement,1999,25:227.
[3] Patsias S,Staszewski W J.Damage detection using optical measurements and wavelets[J].Structural Health Monitoring,2002,1(1):5.
[4] Yoshida J,Abe M,Kumano S,et al.Construction of a measurement system for the dynamic behaviors of membrane by using image processing [C]//Structural Membrane 2003-International Conference on Textile Composites and Inflatable Structures.Barcelona:CIMNE,2003:576-579.
[5] CHOI Hyoungsuk,CHEUNG Jinhwan,KIM Sanghyo,et al.Structural dynamic displacement vision system using digital image processing[J].NDT &E International,2011,44(2):597.
[6] 罗洪斌,赵文光,文银平,等.CCD 图像监测系统应用于桥梁结构检测[J].华中科技大学学报:城市科学版,2006,23(1):91.LUO Hongbin,ZHAO Wenguang,WEN Yinping,et al.Application of CCD image monitoring system in detecting bridge structure[J].Journal of HUST:Urban Science Edition,2006,23(1):91.
[7] 项贻强,李春辉,白桦.新型非接触式桥梁挠度和变形的检测方法[J].中国市政工程,2010(5):66.XIANG Yiqiang,LI Chunhui,BAI Hua.A new non-touch type testing way to bridge deflection and deformation[J].China Municipal Engineering,2010(5):66.
[8] 田国伟,韩晓健,徐秀丽,等.基于视频图像处理技术的振动台试验动态位移测量方法[J].世界地震工程,2011,27:179.TIAN Guowei,HAN Xiaojian,XU Xiuli,et al.Measuring method of dynamic displacement in shaking table test based on the technology of video processing[J].World Earthquake Engineering,2011,27:179.
[9] Hartley R,Zisserman.A multiple view geometry in computer vision[M].2nd ed.Cambridge:Cambridge University Press,2003.
[10] Mikhail E M,Bethel J S,McGlone J C.Introduction to modern photogrammetry[M].New York:John Wiley &Sons Inc.,2001.
[11] Zhang Z.A flexible new technique for camera calibration[R].[S.l.]:Microsoft Research of Microsoft Corporation,1998.
[12] Harris,C.,and Stephens,M.A combined corner and edge detector [C]//Proceedings of the Fourth Alvey Vision Conference.Manchester:Organizing Committee AVC,1988:147-151.
猜你喜欢
计算机应用与软件(2022年12期)2023-01-31
哈尔滨工业大学学报(2022年5期)2022-04-19
计算机仿真(2021年8期)2021-11-17
汽车维修与保养(2020年11期)2020-06-09
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
电子技术与软件工程(2018年10期)2018-07-16
中国惯性技术学报(2017年1期)2017-06-09
电子制作(2017年23期)2017-02-02
振动工程学报(2015年1期)2015-03-01
