
达芬奇机器人在小儿外科手术中的应用(附20例报告)
2013-08-20 09:47黄格元蓝传亮刘雪来钟浩宇陈巧儿谭广亨
中国微创外科杂志 2013年1期
黄格元 蓝传亮 刘雪来 钟浩宇 陈巧儿 谭广亨
(香港大学玛丽医院小儿外科,香港 999077)
腹腔镜手术已被广泛应用于小儿外科,并取得了满意的治疗效果。尽管如此,人们发现它仍有局限性,例如:术者操作过程中看到的是腹腔镜显示下的二维平面图像、有限的器械操作空间,以及由于手术时间较长所致的术者疲劳等[1,2]。在解决这些技术问题和改善微创手术操作的过程中,达芬奇机器人辅助外科手术系统(以下简称:机器人手术系统)应运而生。目前,机器人手术系统已被广泛应用于成人普通外科[3~5]、泌尿外科[6~8]和心脏手术中[9,10],并正向小儿外科手术领域延伸。
小儿外科手术效果受诸多因素影响,包括患儿年龄、疾病状态、病变的解剖位置、体位和手术复杂性等,这也使得机器人手术的优越性在小儿外科治疗领域内得以充分发挥[11]。近年来,国际上许多小儿外科手术已在机器人手术系统辅助下成功完成,相关报道已涉及小儿腹腔[12,13]、盆腔[14]和胸腔内的各类手术[15]。我中心于2007年开始探索机器人手术系统在小儿外科手术中的应用,截至2012年12月累计完成手术20例。本文通过回顾和总结过去6年间机器人手术系统完成小儿外科手术的临床资料,旨在探索采用机器人手术系统实施小儿外科手术的可行性,为今后该技术在小儿外科手术中的深入开展提供参考。
1 临床资料与方法
1.1 一般资料
本组20例,男女各10例。年龄3~18岁,平均10.7岁。术前诊断胃食管反流性疾病6例,胃食管反流复发1例,胃食管反流伴食管裂孔疝1例,贲门失弛缓症1例,先天性食管狭窄2例,先天性胆总管囊肿2例,肾盂输尿管连接部梗阻5例,膀胱输尿管反流1例,神经性膀胱功能障碍1例。其中,胃食管反流性疾病和先天性食管狭窄患儿10例就诊时伴轻度脱水,经纠正后缓解,其他患者伴有不同程度的腹胀,生命体征平稳。
病例选择标准:根据患儿体型大小,婴儿期(1岁以内)尤其是新生儿(生后30天之内)不适宜接受机器人手术。
1.2 方法
达芬奇机器人手术系统包括内窥镜手术器械控制系统(主控台)、机器臂EndoWrist系统(工作臂和摄像臂)和三维成像视频系统(图1)。机器臂包括摄像臂和工作臂(图1),摄像臂的镜头是双镜头制式,可提供高清三维视频图像,该视像直接连接到主控台的监视器,呈现给术者;工作臂是末端装有四组滑轮的操作装置,当连接钳子、剪刀、缝合针线等器械之后,操作装置可在体内像手腕般转动和操作,因此也称为EndoWrist仿真机械手。术者根据摄像臂提供的视频图像来操控工作臂,实施手术操作(图2)。仿真机器手可模拟人手各种操作动作,可沿垂直轴360°和水平轴270°进行旋转,且活动度大于90°,灵活完成左右、旋转、开合和末端弯曲等7种动作,准确完成钳夹、抓持、切割,缝合等各种手术动作。常规安装机器人,切口的选择与腹腔镜切口选择相同;工作臂和摄像臂的安放时两臂间距要超过8 cm,以防操作时掣肘。此外,工作臂及其所连接的器械,以及摄像臂可根据实际情况,选择直接或经trocar进入腹腔。机器人手术系统配有专用超声刀,手工更换,手术操作方便,更利于术中止血。
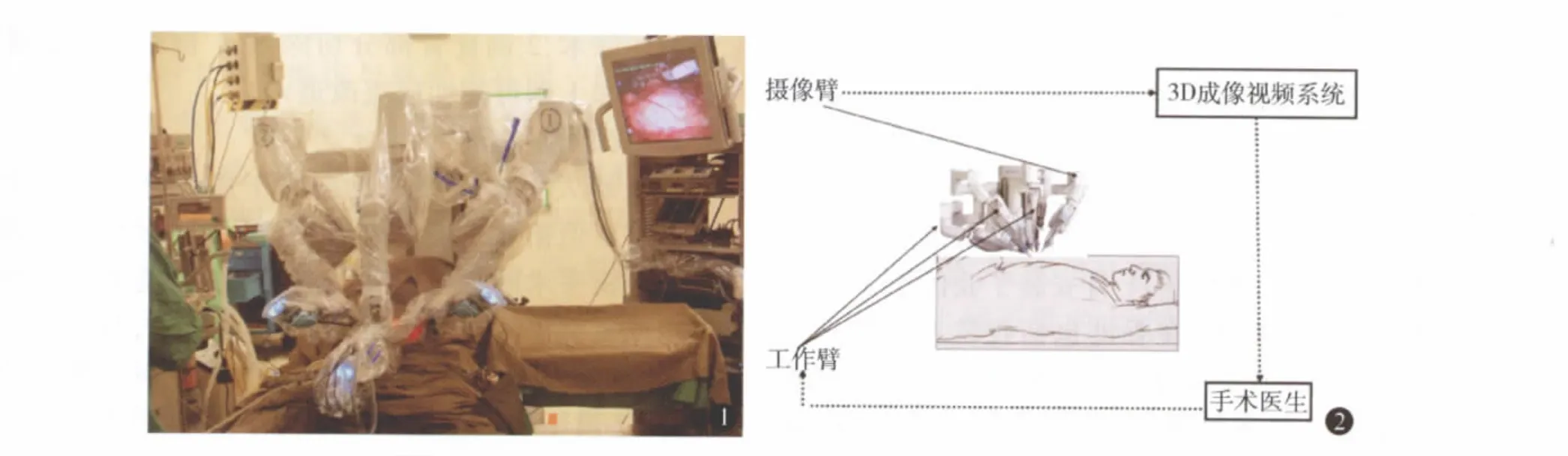
图1 机器臂和部分视频系统示意图 图2 机器人手术系统操作原理示意图
2 结果
手术情况见表1。1例胆总管囊肿切除术中因组织分离困难而行中转开腹,原因为组织感染和电凝无法控制的肝组织创面渗血。9例胃底折叠手术时间(220.1±86.6)min,其中手术时间最短的是一例伴有胃食管反流症状而行胃底折叠术的精神障碍患儿(表1第3例);5例肾盂成形手术时间(204.2±68.9)min。本组手术时间最长的是可控性尿流改道术,该患儿为12岁女童,患有神经性膀胱功能障碍,手术时间较长的主要原因是术中机器人系统设置、附属设施的移动,以及皮瓣的建立。所有患儿围手术期未出现并发症。
全部患儿出院后接受定期随访,随访方式为复诊,平均随访时间为3.3年(1~5年)。1例因先天性食管狭窄伴食管气管瘘而行食管部分切除,术后2周狭窄复发,经二次机器人食管部分切除手术后治愈。其余患儿随访未见并发症和复发现象。

表1 机器人手术系统辅助下实施小儿外科手术情况
3 讨论
3.1 机器人手术系统简介
2000年美国食品和药物管理局(FDA)授权Intuitive Surgery公司开发机器人辅助外科手术系统。从那时起,各种类型手术系统被研发和生产,但最终只有达芬奇机器人手术系统被投入市场并步入临床应用。以达芬奇的名字来命名的原因是:制造商认为达芬奇是世界上第一台机器人的发明者。目前该机器人手术系统每台价格约200万美金。
香港地区于2005年11月安装了我国第一台机器人手术系统。目前,在香港包括我院在内共有7台机器人应用于外科手术。这套机器人手术系统包括内窥镜手术器械控制系统(主控台)、EndoWrist系统(工作臂和摄像臂)和三维成像视频系统(图1)。机器人采用的是主-仆式远距离操作模式,手术时EndoWrist系统的不同摄像臂将二维视频图像传输到视频系统,经主控台计算机系统合成清晰的三维立体图像,这样外科医生可在远离手术台的主控台前清晰地了解术野情况,医生双手控制操纵杆,手部动作被传送到工作臂的尖端,实施精确而平稳的手术操作(图2)。
3.2 机器人手术系统辅助下完成小儿外科手术情况
2007年,香港大学玛丽医院安装了第一台机器人手术系统。到目前为止,我中心采用该系统累积完成外科手术超过500例,而小儿外科手术到现在20例,平均年龄10.7岁(3~18岁)。遵照知情同意原则,患儿家属术前同意采用机器人手术系统实施手术。全部手术由已取得机器人手术操作资质的小儿外科医生来完成。如表1所示,手术包括9例胃底折叠术(其中1例因贲门失弛缓症术中行机器人辅助下Heller手术),5例肾盂成形术,2例胆总管囊肿切除术,2例食管部分切除术,1例输尿管膀胱再植术和1例可控性尿流改道术。
3.3 我们的经验
机器人手术已被广泛应用于成人外科手术之中。它不但拓展了微创外科治疗手段,而且可有效缩短腔镜手术的学习曲线,使得传统腔镜下高难度手术或复杂手术相对容易完成[16]。此外,与传统腹腔镜、胸腔镜手术相比,机器人手术系统具有独特的优势:①清晰准确的三维立体视野:腔镜手术是彩色显示屏幕下的二维平面图像,而机器人手术采用双镜头三晶片数码摄像系统,具有三维景深和高分辨率功能,三维立体感更强,可放大10~15倍,这使得术者对术野信息掌握更加清晰,操控更加准确。②智能动作:操控者手部动作可被实时转化为精确的机械动作,所有机械动作与开放手术中的动作技巧高度仿真。③动作校正和抖动过滤功能:EndoWrist工作臂比腹腔镜更加灵活,可选择不同角度在病灶周围实施操作,操控者根据手术图像可随时校正操作角度,保证最大视野,使操作更加完美,此外,内部防抖动程序提供了更加精确的动作缓冲体系,使操作过程中的动作抖动被降至最低。④远程控制:操作者无须贴近患者进行操作,节省空间,避免术者和助手间的拥挤,以及对手术视野的阻挡。⑤适合小儿手术:与成人相比,小儿(尤其是新生儿)体腔空间狭小,传统手术操作受到限制,尽管腔镜手术已经解决了这个问题,但对局限性病灶的准确操作,仍有不足。在有限空间内实施精细操作,减少副损伤,提高疗效的同时最大限度地减少患儿痛苦[17,18],这些是对小儿外科手术的特殊要求,而机器人外科手术的应用可在小儿外科手术领域内更好地发挥优势,使得小儿外科手术向“微创精准”的目标更迈进一步。⑥减缓术者疲劳:与传统手术和腔镜手术相比,良好的三维视野和简化的配合方式,有效地减少了视野差异和手术人员配合差异,使得术者能更集中精力去应对手术器械差异、触觉差异和手眼协调差异,若辅以熟练操作,能较大程度减轻术者疲劳。
我中心在实际操作中,可明显体会到上述优势的存在。术者可舒适地坐在主控台进行操作,并可同时借助监视器下清晰的三维成像来观察术野,通过手控和踏板装置对放置在术野内的器械实施操控。术者手部操控被转化成机械手臂的精细操作,且最多可同时操控3部机械手臂。机械手臂装置包括钳子、持针器以及分离电钩等,术者手部的可操控性随意运动信息与机器人机械手臂借助系统内装置连接,这样术者就可以在远离患者的主控台实施操作,完成分离解剖和缝合等动作。尽管远距外科(Tele-surgery:术者的操作与患者不在同一房间)已成为可能,但由于数据传送等潜在问题,目前尚未在临床推广普及。而对于机器人手术而言,对机械手臂实施间接操控,以及操作中防抖动功能的存在,术者可借助图像放大和器械的精密运动,来实现对手术的精细操控,这对未来远距外科的有效开展可起到“抛砖引玉”的作用。
从我中心初步经验来看,对于初次开展机器人手术的小儿外科医生而言,我们主张将胃底折叠术作为首选术式。该术式操作技术相对简单,术者可在胃食管连接处充分地实施组织分离、解剖和缝合。就本组临床数据来看,尽管前2例手术时间相对较长,但随后的手术时间很快被缩短,并与国际上惯用的腹腔镜胃底折叠术手术时间相当[19]。而且所有患儿出院后随访未发现有并发症和复发现象,与相关文献报道一致[19]。在手术操作掌握方面,Patel等[20]曾对机器人辅助下行前列腺癌根治术的临床资料进行总结,并提出:与腹腔镜手术相比,机器人手术系统更能够帮助术者通过学习曲线的陡坡。尽管如此,和许多外科新技术一样,机器人手术的开展,尤其是在起步阶段会受到争议甚至质疑,因此无论是术者还是家属都需要一个心理适应过程。国外泌尿外科学者大力倡导对机器人手术系统的接受和关注,认为机器人手术是行之有效的微创外科治疗手段[21]。此外,国内亦有学者倡导采用机器人实施小儿泌尿外科的手术,他们提出:对一些小儿泌尿外科重建手术如肾盂成形、经膀胱输尿管重建及抗反流手术等,机器人手术系统与传统开放或普通腹腔镜手术相比,优势更加明显[22]。
对于胃底折叠术,部分学者认为机器人手术相对传统腹腔镜手术而言,手术时间和疗效方面的优势并不明显。但是,我们的体会是该术式可促进术者掌握重要的操控技能,当采用机器人熟练完成胃底折叠术后,术者很容易熟练掌握其他的机器人外科手术,包括肾盂成形术。在这一方面,其他小儿外科中心也有类似经验[23]。机器人外科手术与腹腔镜手术的原则相同,术者仍需采用经腹膜入路实施手术,对于机器人手术系统而言,它提供了三维清晰手术图像和精密操作环境,使外科缝合过程不再复杂,术者可在主控台轻松采用缝线进行精细的吻合。机器人外科手术的这种优势也可从本文临床数据中得到体现:患儿术后未出现并发症,手术时间与腹腔镜手术亦无差异,部分手术甚至短于腹腔镜手术。上述良好的手术效果目前已被一些国际小儿外科中心报道[24,25]。对于其他较复杂的小儿外科手术,比如胆总管囊肿切除术和食管手术,虽然我中心病例相对少,但从目前数据来看,我们的观点是不主张采用机器人系统。对于上述两种疾病而言,采用机器人系统治疗主要优势仅限于放大视野,而对于新生儿或婴儿而言,虽然胆总管囊肿或食管畸形诊断相对容易,但机械手臂的大小并不很适合这类患儿。因此,现阶段机器人手术系统仅限于体形相对大,适合于可放置机械手臂的患儿实施手术。
如上所述,机器人系统可辅助进行精细解剖和缝合,尤其是在空间狭小的体腔内。放大视野和防抖动效果,以及精细的触觉感应,使得机器人手术的优势超越了传统腹腔镜手术。因此,该技术不但是对微创治疗小儿外科疾病手段的有益补充,而且更加符合“微创精准”的治疗理念。小儿外科医生对复杂疾病实施腹腔镜治疗,甚至无需经过非常系统的腹腔镜手术训练也可能完成手术。尽管如此,我们认为当一个中心在开始实施机器人手术的时候,仍需慎重并把握一些重要原则:第一,尽管无需经过腹腔镜训练,但规范的机器人手术训练仍是不可或缺的;在开始正式手术之前,术者需取得相应资质。小儿外科医生从事腹腔镜培训的经验提示:娴熟的腹腔镜操作主要得益于高水平的腹腔镜训练和动物实际操作,以及平时操作时的经验积累,特别是在缝合技术等基本功方面,要求精细、严密[26],而规范化的机器人手术操作训练对熟料操作和技能掌握是非常重要的。第二,助手和手术护士职责重要,他们在床旁操控机械手臂的位置和方向,并与术者间充分沟通,配合术者成功完成手术。第三,在术中意外情况发生时,比如术中大出血,术中电凝无法做到充分止血,此时手术团队应做好中转开腹的准备。鉴于此,助手和手术护士应该对机器人手术系统充分地熟悉和了解,以做到配合充分,因此同样需要接受规范化的机器人手术培训。第四,应充分考虑患儿体形和手术空间大小,否则很难放置机械手臂。第五,采用机器人手术系统实施手术,器械的循环使用非常有限,对患者而言花销较大。
机器人手术目前仍处于临床应用的初级阶段,尚未推广和普及。我们在充分利用它的优势的同时,也应看到它和许多新技术一样,自身尚有革新的空间,例如,机器人手术系统目前尚缺乏触觉反馈系统,通过革新传感系统和(或)反馈信号的整合,提高术者的触觉和感知,这些不仅能促进精细操作,而且有助减少副损伤。对术者而言,仍需要熟练操作技能和积累操作经验,这不但能提高术者对术野内组织器官的感知度,而且有助于减少疲劳,提高手术疗效。机器人手术系统自身的不断革新和发展,也必然有助于推动外科手术的不断进步。
综上,我们认为机器人系统用于小儿外科手术是可行的。在将来,随着手术设备的完善和操控技术的成熟,机器人手术系统会逐渐得到推广和普及。现阶段,由于各方面条件有限,正确选择患者、提高操作熟练度和积累操作经验,以及循序渐进地拓展手术术式,对于防止术中意外情况的发生和并发症的出现,以及提高临床疗效,仍是至关重要的。
1 Kolvenbach R,Schwierz E,Wasilljew S,et al.Total laparoscopically and robotically assisted aortic aneurysm surgery:a critical evaluation.J Vasc Surg,2004,39(4):771 -776.
2 Cook RC,Nifong LW,Enterkin JE,et al.Significant reduction in annuloplasty operative time with the use of nitinol clips in robotically assisted mitral valve repair.J Thorac Cardiovasc Surg,2007,133(5):1264-1267.
3 Nguyen NT,Hinojosa MW,Finley D,et al.Application of robotics in general surgery:initial experience.Am Surg,2004,70(10):914 -917.
4 Diamantis T,Alexandrou A,Gouzis K,et al.Early experience with totally robotic Roux-en-Y gastric bypass for morbid obesity.J Laparoendosc Adv Surg Tech A,2010,20(10):797 -801.
5 Koh DC,Tsang CB,Kim SH.A new application of the four-arm standard da Vinci?surgical system:totally robotic-assisted left-sided colon or rectal resection.Surg Endosc,2011,25(6):1945 -1952.
6 Patel VR,Thaly R,Shah K.Robotic radical prostatectomy:outcomes of 500 cases.BJU Int,2007,99(5):1109 -1112.
7 Krane LS,Shrivastava A,Eun D,et al.A four-step technique of robotic right adrenalectomy:initial experience.BJU Int,2008,101(10):1289-1292.
8 Trabulsi EJ,Linden RA,Gomella LG,et al.The addition of robotic surgery to an established laparoscopic radical prostatectomy program:effect on positive surgical margins.Can J Urol,2008,15(2):3994 -3999.
9 高长青,杨 明,王 刚,等.机器人非体外循环冠状动脉旁路移植术.中华外科杂志,2009,47(8):570 -573.
10 Folliguet TA,Dibie A,Philippe F,et al.Robotically-assisted coronary artery bypass grafting.Cardiol Res Pract,2010,2010:175450.
11 Poulakis V,Witzsch U,De Vries R,et al.Intensive laparoscopic training:the impact of a simplified pelvic-trainer model for the urethrovesical anastomosis on the learning curve.World J Urol,2006,11:804 -807.
12 Olsen LH,J?rgensen TM.Robotically assisted retroperitoneoscopic heminephrectomy in children:initial clinical results.J Pediatr Urol,2005,1(2):101 -104.
13 Albassam A,Gado A,Mallick MS,et al.Robotic-assisted anorectal pull-through for anorectal malformations.J Pediatr Surg,2011,46(9):1794-1797.
14 Olsen LH.Robotics in paediatric urology.J Pediatr Urol,2006,2(1):40-45.
15 Braumann C,Jacobi CA,Menenakos C,et al.Robotic-assisted laparoscopic and thoracoscopic surgery with the da Vinci system:a 4-year experience in a single institution.Surg Laparosc Endosc Percutan Tech,2008,18(3):260 -266.
16 O’Malley PJ,Van AS,Bouchicr-Hayes DM,et al.Robotic radical prostatectomy in Australia:Initial experience.World J Urol,2007,24(2):165-170.
17 李 龙,张金哲.微创精准小儿外科技术理念及思考.中华小儿外科杂志,2010,31(10):725 -727.
18 李 龙,张金哲.精准微创技术是现代小儿外科发展的新阶段.临床小儿外科杂志,2011,10(1):1 -4.
19 Lehnert M,Richter B,Beyer PA,et al.A prospective study comparing operative time in conventional laparoscopic and robotically assisted Thal semifundoplication in children.J Pediatr Surg,2006,41(8):1392-1396.
20 Patel VR,Thaly R,Shah K.Robotic radical prostectomy:outcomes of 500 cases.BJU Int,2007,99(5):1109 -1112.
21 Peters CA.Robotically assisted surgery in pediatric urology.Urol Clin N Am.2004,31(4):743-52.
22 魏 武,龚 隽,葛京平,等.达芬奇机器人在泌尿外科手术中的应用.医学研究生学报,2011,24(1):101 -104.
23 Camps JI.The use of robotics in pediatric surgery:my initial experience.Pediatr Surg Int,2011,27(9):991 -996.
24 AminZ,Woo R,Danford DA,etal.Robotically assisted perventricular closure of perimembranous ventricular septal defects:preliminary results in Yucatan pigs.J Thorac Cardiovasc Surg,2006,131(2):427-432.
25 van Haasteren G,Levine S,Hayes W.Pediatric robotic surgery:early assessment.Pediatrics,2009,124(6):1642 -1649.
26 刘雪来,李 龙,黄格元,等.小儿腹腔镜技术短期强化培训模式的初探.中国微创外科杂志,2011,11(6):513-516.
猜你喜欢
实用手外科杂志(2022年2期)2022-08-31
中老年保健(2021年9期)2021-08-24
心电与循环(2021年1期)2021-02-05
中国医学装备(2020年3期)2020-04-01
中国普通外科杂志(2019年8期)2019-01-06
中国医药指南(2018年21期)2018-01-22
中国医药指南(2017年3期)2017-11-13
中华胃食管反流病电子杂志(2017年3期)2017-01-16
中华胃食管反流病电子杂志(2016年2期)2016-10-10
中国感染控制杂志(2015年7期)2015-12-13
