
新型反冲式水下船体表面清洗刷设计方案研究
2013-08-11 01:46于靖博杨君德尚振国董丽娜
船舶 2013年2期
于靖博 杨君德 尚振国 董丽娜
(1.大连海事大学 轮机工程学院 大连116026;2.大连海洋大学 机械与动力工程学院 大连116023)
0 引 言
随着世界经济的快速发展和远洋运输事业不断壮大,全球船舶数量激增同燃油经济性以及环境保护之间的矛盾日渐引起人们关注。据统计,截至2009年1月底,全世界已有集装箱运输船3 779艘,运输能力为528.2万TEU,这表明全世界集装箱运输船队的承运能力首次突破500万TEU大关。以日本输出组合(JESA)统计的数据为依据,去年全球新船成交量接近5 000万DWT;若再加上油轮以及军舰等其他类型的舰船,那全世界的船舶数量将是一个不小的数目。然而,当今原油资源的日益匮乏已成为制约现有航海业发展的一个最大瓶颈,因此,如何在“节能和环保”的前提下发展航运事业,已成为当今世界航运业发展的一个热门话题。
目前,世界上大部分船舶仍然依靠燃油提供动力。船舶在航行过程中遇到的阻力越大,航速及经济效益会显著下降,而燃油消耗量和二氧化碳的排放量则会明显上升。船舶航行受到的阻力主要有摩擦阻力、形状阻力、兴波阻力以及空气阻力等,其中海洋浮游生物附着对船体表面摩擦阻力的影响较大。因此,在本领域积极探索研究一种新型环保的清洗技术是具有重要意义的。
1 主要船体清洗技术对比
目前,国内外在船舶表面清洗领域有很多技术措施,许多远洋运输公司在船体表面涂刷挥发性较慢的毒性油漆,通过防止浮游生物的附着以达到降低燃油消耗量的效果。但由于该油漆毒性太强,对沿航线的其他生物也造成了不同程度的伤害,破坏了局部海洋生态环境。因此,国际上已经严令禁止使用各种毒性油漆。此外,还有一些运输公司在船体表面粘贴保护膜,在一定时间内将保护膜撕起以达到清除浮游生物的目的。不过,该方法更换频率较大,代价也高,所以也渐渐地被市场所淘汰。由此,近年来,船舶表面清洗技术的研发越来越被人们所重视。
首先,从清洗环境上来看,船体表面清洗可分为陆上作业和水下作业两种。为了延长船舶的使用寿命、保证船舶的经济性及安全运行,船舶必须定期进坞检修。船舶在脱离水面的状态下,可对其表面使用喷砂处理或者高压水射流清洗技术进行清洗、维护,以清除一些较顽固的海洋附着物。这两种方法都需要船舶占用船坞,因此使用频率不宜过高,否则会增加船舶的停航损失,影响船舶运营经济性。
在我国,船体表面清洗主要采用人工喷砂处理,效果明显但工人劳动强度大,效率低下,且对人体及环境有相当大的污染;高压水射流技术则是近30年发展起来的新技术,它以水射流为主,集合泵、阀、密封、液压、材料、自动化控制等多门学科。其利用高压泵打出高压水,经管道到喷嘴,喷嘴则把高压低流速的水转化成低压高流速、高能量密度的水射流,正向或切向冲击被清洗表面,从而将结垢物剥离,完成清洗作业。该技术能耗低,操作者作业环境和劳动强度均有所改善。不过,由于在高温、高湿天气会快速生成二次浮锈,因此也阻碍了该技术的推广应用。而且,该系统对水质要求非常严格,淡水消耗量巨大;并且清洗后的大量污水夹杂着锈皮、漆皮流入江海,容易造成附近水域的严重污染。目前,我国就有个别企业因解决不了二次浮锈的技术难题,不得不将购买的高压射流除白设备长期闲置[1]。
开展水下清洗作业由于可以在船舶锚泊或停靠码头时直接进行,这样就为在恶劣的海洋环境下开展作业提供了保障,既减少了船舶的停航损失,又使得船舶的燃油消耗大大降低,提高了经济效益;同时还缓解了船坞不足的问题,所以水下清洗对于海洋工程结构的维修及军事方面应用亦有广阔前景。在国外,日本、美国、法国等国家的水下清洗作业装置已经日趋成熟并走向实用化[2-3]。
目前水下清洗主要有如下几种方式:
(1)水下人工清洗:由潜水员手持清洗转刷,利用转刷产生的负压使之紧贴船体,人工推动刷体在船体表面运动;
(2)水下喷射清洗装置:原理是将高压水用于水下清洗作业;
(3)水下清洗机器人:它主要由吸附和移动机构、清洗装置以及控制系统三部分组成,靠永磁吸附履带实现吸附船体表面并移动的功能;
(4)遥控水下清洗器:由遥控器或计算机来控制水下清扫机器人完成清刷作业。
上述几种方法各有利弊:人工清洗工作强度大且危险系数高;有些设备则需要在水温较高且海水能见度较高的港口才可以使用,具有很大的局限性;依靠磁性吸附的清洗机器人不仅对船舶的导航系统有一定影响,而且在弧度较大的船体表面很难吸附,容易掉落,并且其造价也较高。因此,开展水下船体表面清洗作业的技术研究,对促进该领域的技术进步具有重要意义[4]。
2 总体设计方案
基于简化结构、低成本易维修且便于推广的设计思路,本设计方案参考冲击式水轮机的原理:首先利用潜水泵抽取海水并加压来冲击叶轮;进而带动清洗刷转动来清洗船体表面,同时利用排出海水的反冲作用力和潜水泵进水口的吸力将刷体压在船体表面;最后再利用传动装置带动刷体沿船体表面移动,从而达到整船外表面清洗的目的。另外,考虑到海洋生物的繁殖期多在春秋两季,在此期间其附着力相对最为薄弱,所以建议在每年的春秋两季缩短对船体表面的清洗周期,这样可以大大减少附着物的数量,提高清洗效率,进而达到较为理想的清洗效果。
本设计由动力潜水泵、可替换式刷体和传动装置三部分组成,动力潜水泵主要为刷体提供动力及反冲力。清洗刷的刷体结构如图1所示,其上端连接潜水泵,刷头部件可以根据实际情况随时选换,具体选换标准请参考表1。
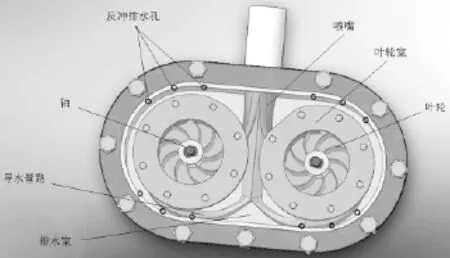
图1 清洗刷刷体结构图
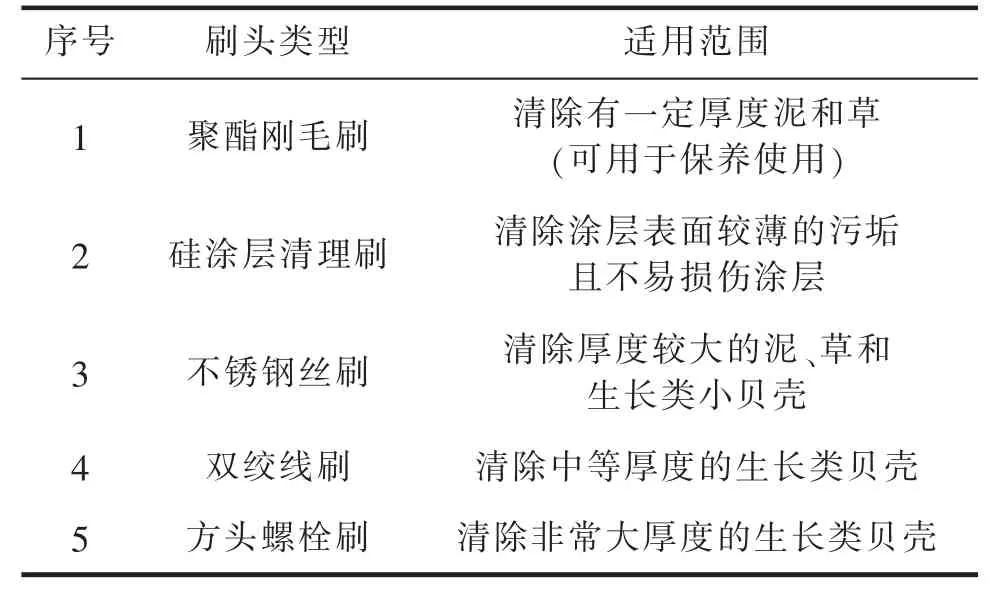
表1 可选刷头类型及适用范围
传动装置由一个放置于甲板上并可移动的卷扬机构成,用于控制刷体爬上或者爬下船体表面,克服由于水泵及刷体本身重力及摩擦力所带来运动的不便,同时起到移动刷体的作用,卷扬装置随着刷体的上下移动及时地收放保护缆绳,为作业刷体提供安全保障条件,并为潜水泵提供动力和控制电缆,这样刷体边移动边清洗,如此往复即可完成清洗任务。
只要正确选择刷头并合适控制清洗方法和时间,就能轻松清除船体表面的海洋附着物,并且不会损伤到船体表面的涂层。这样,我们可以在船舶不靠码头和不进船坞的情况下,随时对船舶水线以下部位所附着的海生物实施清除,既节省大量人力,又节约很多宝贵时间。这既能提高船舶航速、降低燃料消耗,又能提高船舶在航率、节省维修经费,具有较高的经济效益,从而达到节能环保的理想效果。
3 结 论
该清洗方案能延长船舶进坞修理时间、提高船舶运行效能、减少燃料成本,对船舶的节能环保将发挥积极作用。
(1)本新型反冲式清洗刷可以在甲板工作人员的操控下,较方便地清洗船体水线以下表面的海洋附着物,且不损伤船体表面油漆;清洗速度可以通过调节卷扬设备上的步进电机来控制。
(2)与传统的清洗方法相比具有明显优势,其能够克服永磁式水下清刷机器人干扰船舶导航设备的弊端,并具有结构简单、制造方便、价格便宜等特点。
(3)考虑到实际最佳清洗效果,建议在春秋两季使用,并且可在刷体上加装水下可视装置,以进一步增加对船体水线以下表面清刷效果的检测功能。
[1]全玉臣.船舶清洗市场趋势[J]. 清洗世界,2007,23(1):52-54.
[2]袁夫彩,孟庆鑫,王丽慧,等.水下船体表面清刷机器人方案研究[J].船舶工程,2002(1):44-46.
[3]孟庆鑫,王义文.水下船体表面清刷机器人吸附及移动性能分析[J].哈尔滨工程大学学报,2006,27(2):272-275.
[4]张玉莲,陈胜,章海.船舶水下液压清洗设备研究[J].渔业现代化,2009,36(3):52-55.
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
船舶(2021年4期)2021-09-07
防爆电机(2021年3期)2021-07-21
铀矿冶(2021年2期)2021-05-24
船舶标准化工程师(2019年4期)2019-07-24
船舶标准化工程师(2019年4期)2019-07-24
军工文化(2017年12期)2017-07-17
中国船检(2017年3期)2017-05-18
筑路机械与施工机械化(2016年8期)2016-10-25
船舶标准化工程师(2015年5期)2015-12-03
