胸部CT图像肺区域边界凹陷自动修补
2013-07-20 02:34张欣王兵杨颖王苗吴辰张进兴
计算机工程与应用 2013年24期
张欣,王兵,杨颖,王苗,吴辰,张进兴
1.河北大学电子信息工程学院,河北保定 071002
2.河北大学数学与计算机学院,河北保定 071002
3.河北大学附属医院CT室,河北保定 071002
胸部CT图像肺区域边界凹陷自动修补
张欣1,王兵2,杨颖3,王苗2,吴辰2,张进兴2
1.河北大学电子信息工程学院,河北保定 071002
2.河北大学数学与计算机学院,河北保定 071002
3.河北大学附属医院CT室,河北保定 071002
1 引言
大量研究证明,计算机辅助诊断技术(Computer Aided Diagnosis,CAD)能有效地帮助放射科医生从CT(Computerized Tomography)图像中检测出肺部疾病,并为肺癌的早期诊断奠定基础[1-2]。在临床影像诊断过程中,医生一般只关注有利于疾病诊断的感兴趣区域,就肺部CT图像的特点,能够反映肺部病变的信息全部集中在肺部区域中,而其他如胸廓、心脏、隔膜、检查床等属于不相关信息,因此,肺组织自动分割是计算机辅助诊断技术中一个必要的预处理过程,准确有效地分割出肺实质区域,是提取疑似病变区域的基础。肺与周围组织的对比形成了大多数分割方法的基础,通常采用阈值分割、区域增长等方法求得阈值将CT图像二值化。在通过上述阈值及区域生长对肺区域进行分割时,提取出来的肺实质是不完整的,即肺边界会有凹陷。主要有两种类型的凹陷,一种是与肺壁粘连的肿瘤与肺壁在灰度级上近似,容易被分割掉,形成胸膜结节型凹陷。另一种是两个肺实质之间的凹陷,主要是由肺部血管造成的,称为血管型凹陷。肺实质分割时,未将肿瘤区域和肺部血管包含在肺实质内会导致肿瘤、血管、气管等特征提取或识别等后续操作都不能正确进行,所以需要对有凹陷的肺区域采取修补操作。迄今为止已提出多种方法用于修补分割后的肺区域边界凹陷。滚球法[3]采用一个球形(或圆形)结构元素在提取出来的肺区域边界上沿某个方向滚动,在滚动的过程中,凡是被滚球和肺区域封闭的值为1(二值图像)的区域都归入肺区域。滚球法适合修补小的胸膜结节型凹陷和细小血管型凹陷,滚球半径过大计算成本会大幅度增加,并引起局部形状失真。文献[4]采用样条曲线拟合的方法仅对肺区域外侧的胸膜结节型凹陷进行修补。文献[5-6]采用边界行进算法修补边界凹陷,并给出一个凹陷修补的自适应判断条件旨解决过分割问题。几何凸点搭桥法[7-8]计算肺区域边界线上每点的曲率,根据曲率大小将其分为凸点与非凸点,寻找一对凸点,按照预先设定的准则确定是否为凹陷缺口的搭桥点。这两种方法计算量相对较大,限制了其应用范围。
由于提取出的肺部轮廓线是封闭的曲线,需要修补的凹陷缺口处两侧可找到曲线的凸点,连接凹陷缺口处两边的两个邻近凸点可修补曲线的凹陷。定义封闭数字曲线的凸点为曲线的局部极小值点,本文采用曲线局部极小值点连线法修补阈值分割后的CT横断面图像肺区域边界处血管和胸膜结节型凹陷。通过计算边界曲线在不同坐标系下的局部极小值检测曲线的凸点,代替通过计算边界点曲率找凸点的方法。连接凹陷缺口处两边的两个邻近局部极小值点,修补凹陷部分。将肺区域边界线上的点分为局部极小值点和非局部极小值点两类,通过设置不同的匹配模板,用于在不同坐标系下寻找边界曲线的局部极小值点。
2 局部极小值点连线法
2.1 分割肺区域
令F表示一幅肺部CT图像区域,经过自适应阈值分割后提取出胸廓内部的感兴趣区域,包括左右肺实质、气管和支气管等。在感兴趣区域中分离出表示左肺和右肺的两个连通分量,如图1所示。令其为目标区域T,赋值为1(图中为黑颜色),形成肺部掩膜;目标区域以外的区域为背景区域F-T,赋值为0(图中为白颜色),背景区域是T的补集(T)c,为一个完整的连通区域。以图像中左边的肺部区域为例,区域的外接矩形在上下两边与肺交于点H和点L,接下来针对肺部掩膜检测凹陷,并将其修补。
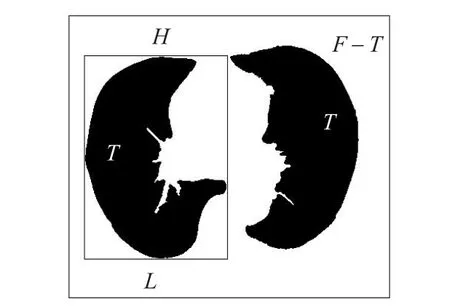
图1 肺区域连通分量
2.2 二值图像边界局部极小值点
分割肺区域后,肺区域边界形成一条封闭的曲线,在所得的封闭曲线上检测凹陷时,需要找到凹陷缺口处两个邻近的连接点,如图2中A和B两点。其中,︵AB为A到B原有的曲线边界的长度,----AB为A到B直线的长度,V点为凹陷处一点。若满足预先设置的条件:

则认为A与B之间具有需要修补的凹陷。于是将A到B的直线代替A到B原有的曲线边界,对边界上的凹陷部分进行修补。如何在凹陷缺口处找到两个合适的连接点来修补凹陷缺口,即选择哪两个点做连线?

图2 边界凹陷修补示意图
凸点搭桥法对肺区域轮廓进行有序边界的跟踪,得到一条封闭的有序曲线,计算每个边界点的曲率,将边界上的点区分为凸点和非凸点,找到凹陷缺口处两边的两个邻近的凸点(曲率值大于0),连接凸点对凹陷部分进行修补。在选择连接点时如果避免计算边界点的曲率,可有效提高边界凹陷检测的效率。
令S代表一幅图像中像素的子集,p是S中的像素,其坐标是(x,y),p在水平和垂直的方向有4个相邻像素,其坐标:

这个像素集称为p的4邻域,用N4(p)表示。p的4个对角线的相邻像素用ND(p)表示,则p的8邻域像素集为:

令V是用于定义邻接性的灰度值集合,在二值图像中,如果把具有1值的像素归入邻接的,则V={1},同样,如果把具有0值的像素归入邻接的,则V={0}。如果q∈N4(p),则具有V中数值的两个像素p和q定义为4邻接的。
定义1(4邻域通路)从具有坐标(x,y)的像素p到具有坐标(s,t)的像素q的4邻域通路是特定的像素序列,其坐标为:

其中,(x0,y0)=(x,y),(xn,yn)=(s,t),并且像素(xi,yi)和是4邻接的。n是通路长度。
定义2(边界局部极小值点)令R是二值图像中目标区域T的一个连通区域,如图1中一个黑颜色区域。若像素e是R的边界点,则e有一个或多个不在R中的邻域点(4邻域点或8邻域点),但至少有一个在R中的邻点h。令e中有r(1≤r≤7)个不在R中的邻域点,若e是区域边界局部极小值点,则e的不在R中的邻域点有4邻域通路,并且通路长度为n(4≤n≤7)。即e的邻域中不在R中的点至少有4个,并且是连通的,不被1值打断。
边界局部极小值点在一定程度上反映了曲线的凸凹特性。如图3所示,阴影区域的值为1,背景区域的值为0。图3(a)表示将图2中的曲线逆时针旋转角度α后,在凹陷缺口处找到局部极小值点A,图3(b)表示将曲线逆时针旋转角度β后,在凹陷缺口另一边找到局部极小值点B。若AB连线满足公式(1),则连接A、B两点修补凹陷。将区域边界线上的点分为局部极小值点和非局部极小值点两类。通过求边界曲线在不同的平面坐标系下的局部极小值点,可代替求边界点的曲率。

图3 检测边界局部极小值点示意图
2.3 模板匹配
对于数字曲线,可以通过设置不同的匹配模板,实现在不同坐标系下检测局部极小值点[9]。按照定义1的要求,图4给出4个检测局部极小值点的匹配模板。其中黑颜色表示1,与目标区域T的值一致,白颜色表示0,与背景区域(T)c的值一致,×表示不予考虑,既可以是1,也可以是0。将4个匹配模板分别按顺时针方向旋转45°、90°、135°、180°、225°、270°、315°可派生出另外28个匹配模板,因此可将图4中的匹配模板称为基础模板,经旋转后产生的模板称为派生模板。此条件下共设置了32个不同的匹配模板,表示将图像坐标系顺时针旋转45°、90°、135°、180°、225°、270°、315°情况下寻找不同的局部极小值点。
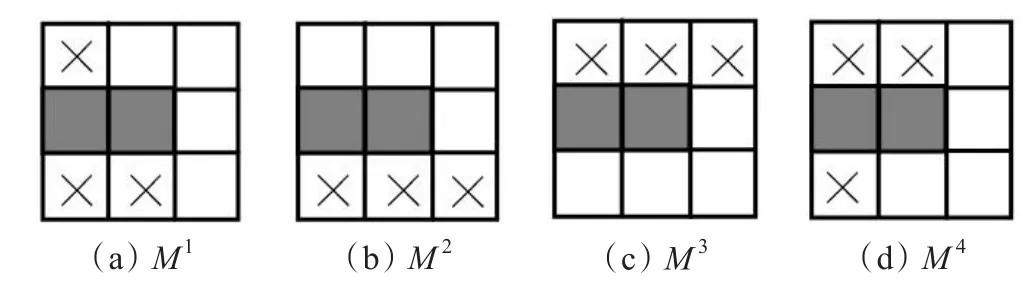
图4 基础模板设置
令匹配模板为Mi,其中i=1,2,…,K,K表示匹配模板的总量。@为模式检测算子,T@Mi表示在集合T中检测与匹配模板Mi一致的模式。令Ci=T@Mi,则将检测过程写为:

其中,Z2表示二维整数空间,T与Mi都是Z2中的子集,Tc为T的补集,(W-Mi)为Mi的局部背景。则T中局部极小值点集合为LM(T):

图5说明了公式(5)~公式(7)给出的检测结果。其含义是,如果T的某个3×3区域与模板Mi相匹配,则称匹配模板Mi找到了T中的一个匹配。对于一个特定的匹配模板,当T中3×3区域的中心及另一相邻像素值为1,而在白颜色模板元素下4个连通的像素值为0时,才会出现模式的匹配。不必顾及在3×3区域内的其他有×标记的像素值。用Mi(i=1,2,…,32)在T找到所有的匹配就是找到了所有满足模板要求的局部极小值点。这些局部极小值点对应的是目标边界区域的凸点,因为其值为1,周围至少4个像素值都为0,故表示其曲率大于0。图5(a)中的黑颜色区域是需要做边界凹陷修补的区域,图5(b)表示使用32匹配模板找到的局部极小值位置图,图中10个图标位置表示使用不同的匹配模板所找到的局部极小值点。这些点是需要寻找的边界凸点。通过公式(1)判断这些凸点是否为凹陷缺口两边的连线点。如果满足要求,将这两个凸点连接在一起,完成边界凹陷修补。
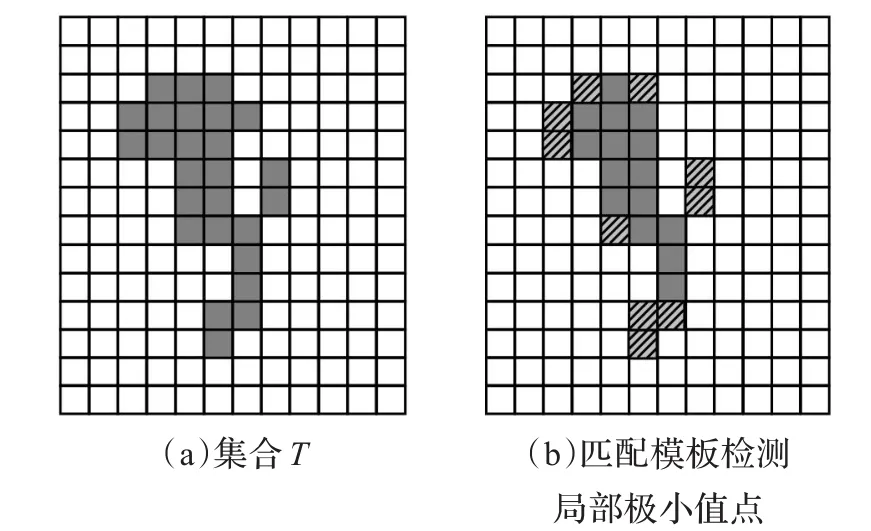
图5 局部极小值点检测结果
不同形式的模板反映了对边界局部极小值定义中r的不同限定,为了避免将直线和45°斜边上的点检测为局部极小值点,匹配模板中r取值大于等于4,即一个边界点至少有4个及以上4邻域通路的点不在区域中才是边界局部极小值点,这些点才能近似反映边界的凸点。同时发现边界平滑部分的局部极小值点通常是用较少数量的模板检测出的,反映出这段曲线的曲率小,线段平滑,不属于需要修补的凹陷缺口部分,因为凡是用同一模板检测出的连续局部极小值点,只保留一个点为局部极小值点,其他点归入非局部极小值点集合。而在需要修补的凹陷部分,大多是用不同模板检测出的局部极小值点。只针对这些局部极小值点利用公式(1)判断其是否为凹陷缺口处的凸点,这样大大降低了凹陷修补时的计算量,提高了修补的效率。
图6(a)是带有边界凹陷的右肺分割结果,与肺壁相连的结节和肺门附近区域的血管使得初始分割时产生边界凹陷,图6(b)是对应的肺边界及使用模板检测出的边界局部极小值点,凡是与模板匹配的点即为边界局部极小值点,并用红色标注出,白色点为非局部极小值点。边界平滑部分由于删除了属于同一模板检测出的局部极小值点,因此大部分为白色的,图6(b)中箭头所指为边界平滑部分。

图6 肺边界局部极小值检测实例
3 实验结果
为验证本文方法的有效性,选取42个全肺CT图像。一部分图像采集于河北大学附属医院放射科,多层螺旋CT数据的肺结节病例,CT数据层厚分别为0.6 mm和8 mm,每一切片分辨率为512×512。另一部分取自LIDC(Lung Image Database Consortium)数据库。CT图像实例如图7(a)所示。
在使用局部极小值连线法修补肺区域凹陷之前,对图像进行预分割,包括图像滤波;自适应阈值分割[10-11];去除背景[12-13];判断肺实质质心是否在肺区域的内部,对肺实质质心不在肺区域内部的,用膨胀方法连接肺区域碎片,并去掉胃气区域;对肺实质质心在肺区域内部的,去除主气管或主支气管;分割成两个肺区域。预分割的结果如图7(b)所示,由于图像左边肺内的胸膜结节的影响,使得预分割结果出现肺边界凹陷。通过对图像预分割结果进行分析,公式(1)中两个参数分别为threshold1=1.5,threshold2为12至25个像素。满足参数设置要求的两个局部极小值点连接起来,修补凹陷缺口,如图7(c)所示,图像左边肺实质内的胸膜结节型凹陷,以及两个肺内侧凹陷部分得到修补,如图中箭头所示。图7(d)为肺实质完整的分割。
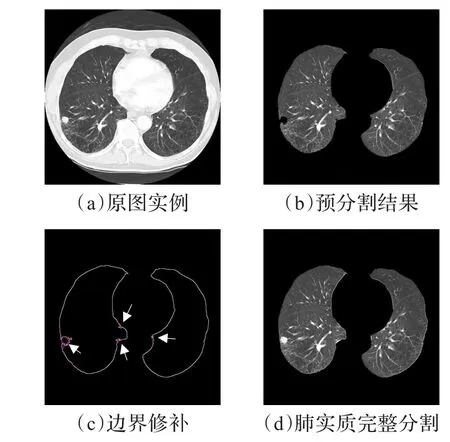
图7 肺边界凹陷修补实例
为了直观地说明本文方法的分割效果,图8列出部分分割结果。每个实例由3个图片组成,从上到下分别为原图、边界修补图和完成边界修补后的肺实质分割效果图。图8(a)、图8(b)和图8(c)显示对两个肺之间部分凹陷的边界修补结果;图8(d)、图8(e)和图8(f)显示对肺底部胸膜结节型凹陷边界修补结果;图8(g)、图8(h)和图8(i)显示对肺尖部胸膜型凹陷边界修补结果;图8(j)、图8(k)和图8(l)显示虽然图像中左边的肺区域有凹陷存在,如箭头所指,但既不是胸膜结节型凹陷,也不是血管型凹陷,不需要对这个凹陷进行修补,因此有效地减少了错误分割。
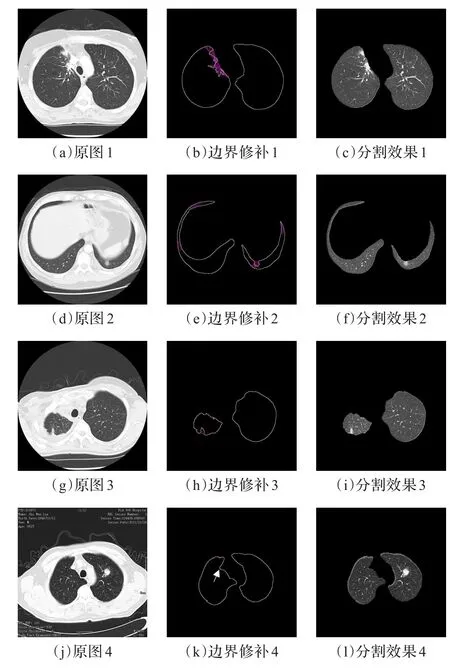
图8 肺边界分割实例
4 结论
本文提出用边界局部极小值点连线法修补阈值分割后的CT图像肺边界处血管和胸膜结节型凹陷。求边界曲线在不同坐标系下的局部极小值点,代替通过求边界点曲率找边界上的凸点,将肺区域边界线上的点分为局部极小值点和非局部极小值点两类,连接凹陷缺口处两边的两个邻近局部极小值点,修补凹陷部分。通过设置不同的匹配模板,实现在不同坐标系下寻找边界曲线的局部极小值点,从而定位需要修补的位置。针对42个全肺CT图像的实验结果验证了本方法的有效性。
[1]Doi K.Computer-aided diagnosis in medical imaging:historical review,current status and future potential[J].Computerized Medical Imaging and Graphics,2007,31(4):198-211.
[2]Yu Peichun,Xu Hao,Zhu Ying,et al.An automatic computeraided detection scheme for pneumoconiosis on digital chest radiographs[J].Journal of Digital Imaging,2011,24(3):382-393.
[3]Armato S G,Sensakovie W F.Automated lung segmentation for thoracic CT:impact on computer-aided diagnosis[J].Acad Radiol,2004,11(9):1011-1021.
[4]钟灵,张建州,张九龙.基于样条曲线拟合的肺区轮廓修补算法[J].计算机应用研究,2007,24(9):305-306.
[5]Pu J,Roos J,Yi C A,et al.Adaptive border marching algorithm:automatic lung segmentation on chest CT images[J]. Computerized Medical Imaging and Graphics,2008,32(6):452-462.
[6]王瑞鑫,郭希娟.自适应边界行进算法在肺癌自动检测系统中的应用[J].仪器仪表学报,2009,30(10):36-39.
[7]Kanazawa K,Kawata Y,Niki N,et al.Computer-aided diagnosis for pulmonary nodules based on helical CT images[J]. Computerized Medical Imaging and Graphics,1998,22(2):157-167.
[8]王倩.CT图像中肺部疾病的计算机辅助诊断方法研究[D].武汉:华中科技大学,2009.
[9]Graham R L.Finding the convex hull of a simple polygon[J]. Journal of Algorithms,1983,4:324-331.
[10]Otsu N.A threshold selection method from gray-level histograms[J].IEEE Transactions on Systems,Man and Cybernetics,1975,9(1):62-66.
[11]Leung C,Lam F.Performance analysis for a class of iterative image thresholding algorithms[J].Pattern Recognition,1996,29(9):1523-1530.
[12]冈萨雷斯.数字图像处理[M].阮秋琦,译.2版.北京:电子工业出版社,2007:421-440.
[13]章毓晋.图像分割[M].北京:科学出版社,2001:43-65.
ZHANG Xin1,WANG Bing2,YANG Ying3,WANG Miao2,WU Chen2,ZHANG Jinxing2
1.College of Electronics and Information Engineering,Hebei University,Baoding,Hebei 071002,China
2.College of Mathematics and Computer Science,Hebei University,Baoding,Hebei 071002,China
3.Department of CT in Affiliated Hospital of Hebei University,Baoding,Hebei 071002,China
After the lung regions are segmented in chest CT images,there exist some concavities or gaps on lung borders.The scheme of connection between boundary curve local minimum points is proposed to repair the lung boundary for gaining the entire lung parenchyma segmentation.Different matching templates are selected to detect the local minimum points in the border curve under different coordinates in order to determine locations that need to repair.Two contiguous local minimum points are connected across the concavity to repair the segmented lung border flaw.The experimentation shows that the scheme in this paper reduces the fault segmentation and enhances the efficiency of lung parenchyma segmentation efficiently.
Computerized Tomography(CT)image;lung boundary;image segmentation;boundary local minimum point; matching template
提出用边界曲线局部极小值点连线法修补阈值分割后的CT横断面图像肺区域边界处血管和胸膜结节型凹陷。设置不同的匹配模板,实现在不同坐标系下寻找边界曲线的局部极小值点,从而确定需要修补的位置。将肺区域边界线上的点分为局部极小值点和非局部极小值点两类,连接凹陷缺口处两边的两个邻近局部极小值点,修补肺边界凹陷部分。实验表明,与通过计算边界点的曲率找边界凸点方法相比,该方法不仅有效地降低了肺实质分割的计算量,而且减少了由于过度分割造成的分割错误。
CT图像;肺边界;图像分割;边界局部极小值点;匹配模板
A
TP391.41
10.3778/j.issn.1002-8331.1202-0377
ZHANG Xin,WANG Bing,YANG Ying,et al.Automatic repair of lung boundary concave in chest CT images.Computer Engineering and Applications,2013,49(24):191-194.
河北大学开放基金(No.BM201110);博士基金(No.2010-196);河北大学大学生创新创业训练计划项目。
张欣(1966—),男,博士,教授,CCF会员,研究领域:模式识别,图像处理;王兵(1966—),女,教授;杨颖(1972—),女,副主任医师;王苗,女,副教授。E-mail:zhangxin@hbu.edu.cn
2012-02-21
2012-05-21
1002-8331(2013)24-0191-04
CNKI出版日期:2012-06-21http://www.cnki.net/kcms/detail/11.2127.TP.20120621.1127.004.html
◎信号处理◎
猜你喜欢
电子与封装(2023年2期)2023-03-22
电子与封装(2022年1期)2022-02-17
儿童时代·幸福宝宝(2021年11期)2021-12-21
激光与红外(2021年6期)2021-07-23
中学数学研究(江西)(2020年5期)2020-07-03
中学数学研究(江西)(2019年11期)2019-12-31
证券法律评论(2018年0期)2018-08-31
科技风(2018年19期)2018-05-14
自动化学报(2017年1期)2017-03-11
外语学刊(2014年6期)2014-04-18