半潜船滚装重大件压载水调节可视化研究
2013-07-02 12:08:18白青壮杨国豪徐轶群
集美大学学报(自然科学版) 2013年2期
白青壮,杨国豪,徐轶群
(集美大学轮机工程学院,福建 厦门 361021)
0 引言
随着全球性能源紧张,石油天然气勘探开发行业急剧发展,用于勘探和开发石油天然气的体积庞大和沉重的大件设备运输量也迅速增加[1].半潜船因其船舶结构特性和特殊用途,近年来多用来运输海洋大型结构物.半潜船不仅结构复杂、建造难度大,而且使用起来凶险异常.在装卸过程中,半潜船主要是通过排压压载水来满足船舶的装卸要求.对于半潜船压载水系统仿真方面,文献[2]用VB实现了半潜船航海模拟器的压载水系统仿真;文献 [3]利用MINIS通用仿真平台与Intouch工控组态软件,开发了船舶压载水系统动态仿真与监控程序.现有文献基本上都是以二维形式来进行船舶压载水系统的仿真,本文对半潜船压载水系统进行了三维视景仿真.
1 半潜船滚装作业简述
基于货物自身特点的不同,半潜船装载方式大体可分为滚装、潜装、吊装以及上述方式的配合利用.其中,滚装作业安全系数较高,综合效率较大,是目前发展潜力最大的装载方式,尤其是对于不具浮性的海洋结构物,基本上都是采用半潜船滚动装载.滚装作业主要有横向滚装和纵向滚装两种方式.相对纵向滚装来说,横向装载作业受外界(如风、流)影响较小,潜船只需要常规停靠,操作方便且效率较高.半潜船滚动装卸作业过程如图1所示,其基本流程为:重大件先固定到滑靴上或滚动车组上,然后再通过连接岸基与半潜船的滑道滑移或滚动到半潜船上.滚装作业过程中货物需匀速缓慢装卸,同时实时计算半潜船的浮态及稳性,并及时对各压载水舱的压载水进行调节,使半潜船装载甲板上的滑道保持水平,且与岸基上滑道的高度差控制在一定的范围内.

图1 半潜船滚装作业过程受力分析Fig.1 The sketch map of Ro/Ro process of semi-submersible heavy lift vessel
2 可视化仿真系统的仿真流程
本系统中的半潜船、重大件以及龙门吊、地形等模型的建立与烘焙在3 ds Max中进行,将模型导入到MultiGen Creator中进行模型简化,然后利用Vega Prime的LynX Prime界面对场景进行基本布置,最后结合Visual C++2003开发平台对软件进行编写调试,实现可视化系统的仿真,其流程图如图2所示.
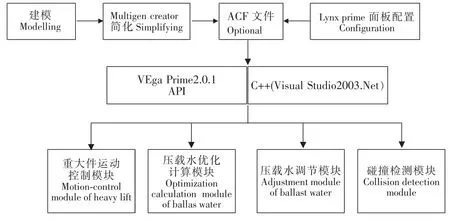
图2 仿真系统流程图Fig.2 Flowchart of the visual simulation system
3 可视化仿真系统的关键技术
3.1 半潜船及重大件的几何建模
基于实时仿真系统运算的快速性和展示的真实性,建模软件需要综合考虑模型质量与数据量[4],选用3 ds Max和MultiGen Creator相结合的方法来解决模型质量和数据量冲突的问题.3 ds Max具有建模逼真、易操作等优点,但模型本身数据量大.而实时仿真建模软件MultiGen Creator因其独特的OpenFlight数据结构的优势可以优化模型数据库,与后续的实时仿真软件Vega Prime无缝结合,故在该可视化系统中3 ds Max仅作为基本建模工具,在Creator中进行模型简化工作.3 ds Max与Creator中模型如图3—图6所示.
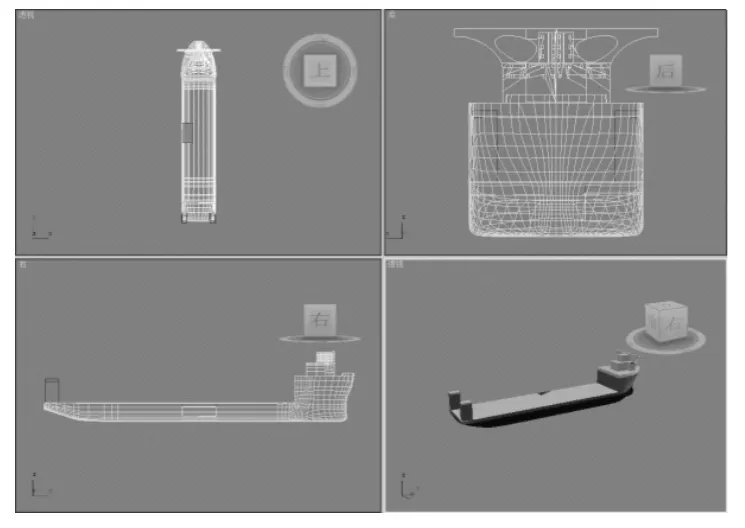
图3 Max中半潜船模型Fig.3 Semi-submersible heavy lift vessel model in Max

图4 Creator中半潜船模型Fig.4 Semi-submersible heavy lift vessel model in Creator
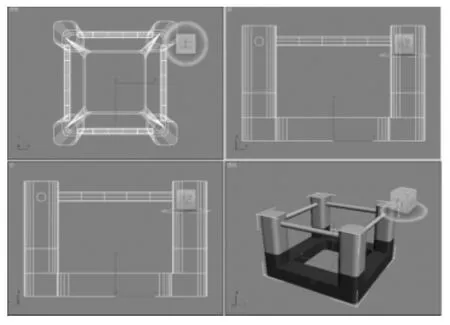
图5 Max中重大件模型Fig.5 Heavy Lifts model in Max
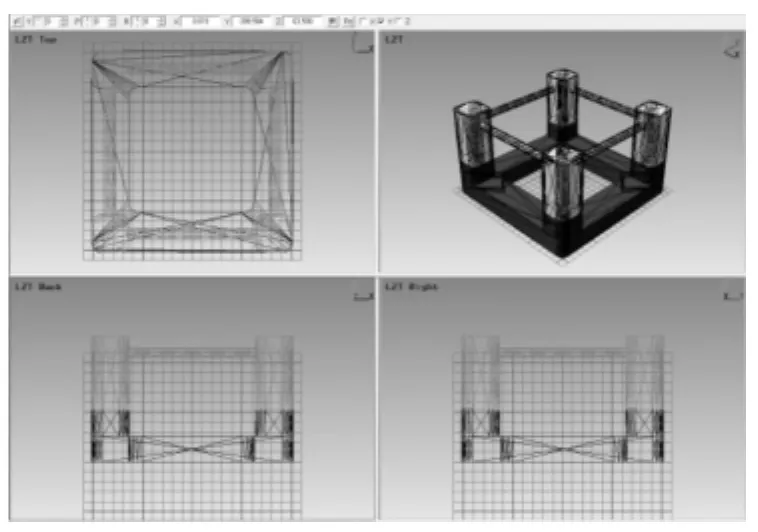
图6 Creator中重大件模型Fig.6 Heavy Lifts model in Creator
3.2 模型优化技术
在具体的视景仿真中,由于所建三维模型数据量大,所以必须对其中模型进行简化与适当优化,否则会导致后期仿真系统渲染、驱动较慢.本文所做的模型简化工作主要针对3 ds Max建模过程,具体表现有:对模型中的非主要部分采用整体建模以减少模型面数,如半潜船的首部上层建筑;在保证精度与可观性的基础上,尽量减少模型中圆柱体、长方体等规则体的端面与轴向的分段数,如重大件的浮体部分;删除模型中多余的点和面,尤其是模型中看不到的面,如重大件和压载水舱中重叠的面等.
3.3 视点控制技术
在视景仿真应用软件中,相机是用于观察动态场景的主要途径之一[5].在该视景仿真中,设置了多架虚拟相机,其中分别定位在半潜船的左右舷外一定距离且靠近船头部与尾部的位置、船舶侧上方,它们能够动态地显示半潜船各压载舱水液位在某一时刻所处的位置及全部视图场景.此外,为了能够观察到重大件货物在整个装载过程的位置变化,需在货物上绑定一架相机.场景中的所有相机可以通过键盘或鼠标很容易地进行转换,即视点转换.
3.4 可视化系统驱动技术
视景仿真包括虚拟环境的制作和仿真的驱动,即建模与后台程序支持.虚拟环境的制作主要为场景模型的建立与布局,虚拟出一个完整逼真的现实场景;仿真驱动则是已建立的虚拟场景能够按照后台程序要求或响应交互操作再现虚拟场景[6].该可视化仿真系统中采用的视景驱动平台为Vega Prime 2.0.1,为保证系统渲染的快速性及针对性,对船厂建模进行了简化.图7为本系统程序驱动流程图.
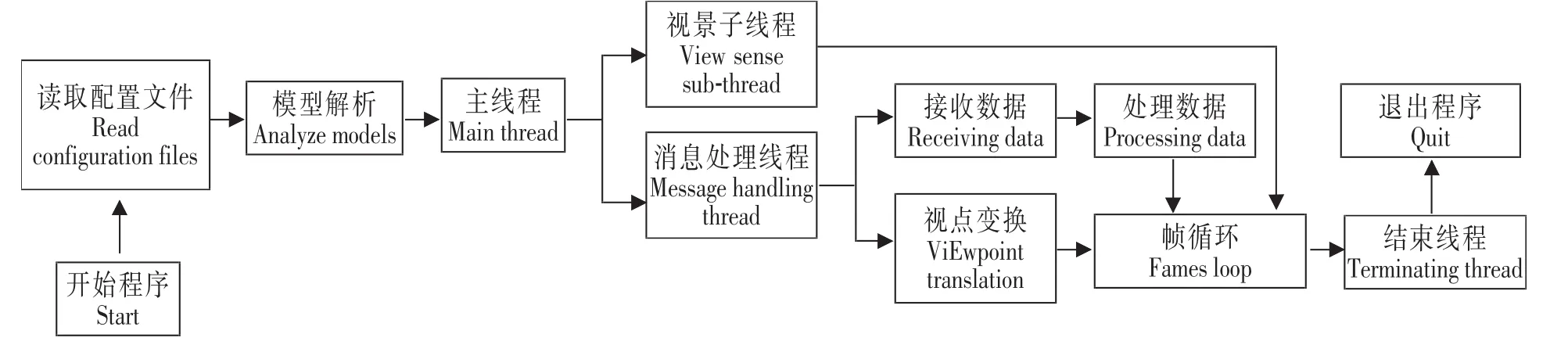
图7 仿真系统程序驱动流程图Fig.7 Process-driven flowchart of the visual simulation system
4 可视化仿真系统的实现
半潜船滚动装卸过程中,需要实时排压压载水以保证船舶横倾角趋于零、装载甲板与岸基齐平.对于压载水调节的优化模型,本文参考了文献 [7]中的数学模型,即

以压载水舱的水调节量绝对值之和为目标函数,以船舶静力学原理和实际约束要求为约束条件.
公式 (1)中,Opt为优化目标函数;Dm为第m舱室压载水的调节量;P、W、U分别为半潜船装载甲板的货物重力分量、半潜船空船重力、其他固定货物的重力,(XP,YP)、(XW,YW)、(XU,YU)为其相应的重心纵坐标和横坐标;Tm、Xm、Ym为第m压载水舱的压载水量、压载水的重心的纵坐标、横坐标;F、XF、YF分别为浮力、浮力作用点的纵坐标和横坐标.
通过约束最优化的方法求解出公式 (1)的解,得出第m舱室压载水的调节量Dm.
仿真系统实现的具体过程为:当重大件货物沿特定路线匀速行进时,在t时刻重大件货物位于半潜船载货甲板某处,此时半潜船m舱室的压载水量为Tm,液位为hm.Δt时间后,货物在装载甲板移动Δs距离,此时重大件货物在半潜船装载甲板的货物重力分量为P,船舶的其他参数为已知.由数学模型 (1)可求出Δt时间内各舱室压载水的调节量Dm,此时刻半潜船的压载水量为Tm-Dm,进而可求出舱室压载水液位.如此,随着货物向载货甲板的缓慢驶入,船舶压载水实时进行调节以满足船舶的浮态与稳性要求,当货物到达指定位置时,停止调载,仿真结束.
按照上文所述的仿真方法,在计算机上实现的半潜船滚装重大件作业压载水调整可视化仿真系统的截图如图8,图9所示.
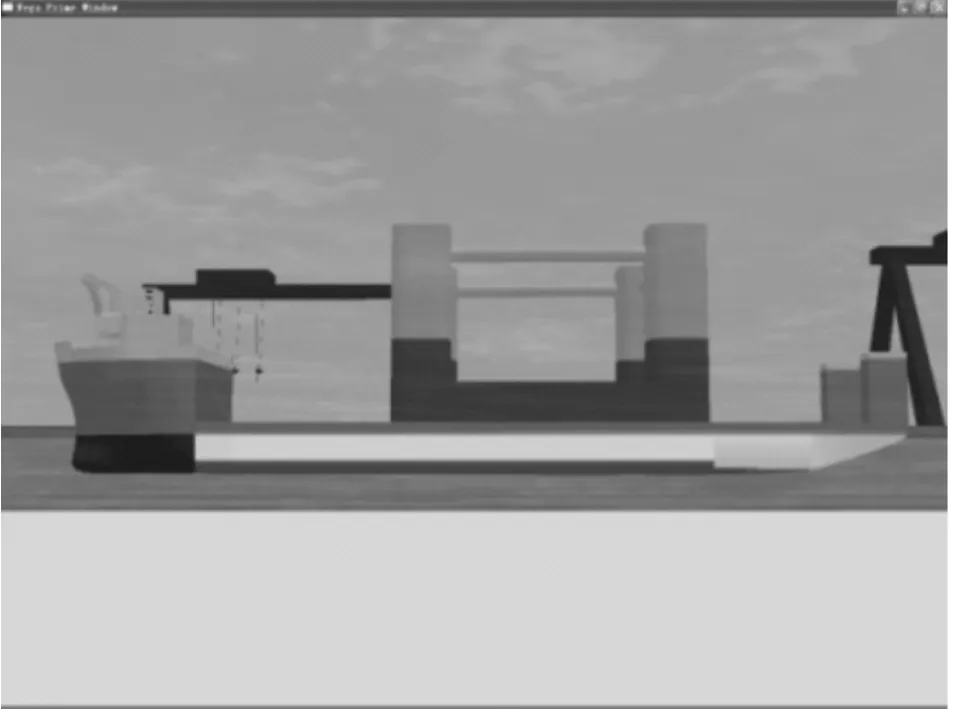
图8 水面以下视图场景Fig.8 View scene under the water

图9 水面以上视图场景Fig.9 View scene over the water
5 总结
为了半潜船重大件滚动装卸安全高效的需要,本文基于三维仿真软件平台Vega Prime,对滚装作业过程中的压载水调节进行了全过程动态可视化仿真.可用于重大件货物的实际装载过程的三维模拟演示,使装载作业过程更为直观,为进一步研究重大件货物的装载作业打下基础.
[1]鲁佳.重大件运输船的机遇 [J].中国水运,2006(10):23.
[2]张显库,金一丞,尹 勇.半潜船航海模拟器的压载水系统仿真 [J].中国航海,2008,31(3):230-235.
[3]肖民,姚寿广,路诗奎,等.船舶压载水系统仿真建模与控制的研究与实现 [J].系统仿真学报,17(12):3036-3039.
[4]肖琼.3DS MAX和MultiGen Creator结合建模探讨[J].系统仿真技术及应用,2005(8):125-128.
[5]廉静静.基于OpenGVS半潜船操作模拟器视景系统的研究 [J].计算机应用与软件,2011,28(5):67-70.
[6]张海龙.基于Vega Prime/Creator的船舶重大件装卸仿真 [J].中国水运,2012,12(6):61-63.
[7]廉静静.航海模拟器中半潜船滚装作业研究 [J].中国航海,2011,34(1):5-8.
猜你喜欢
舰船科学技术(2022年21期)2022-12-12 08:06:02
小猕猴学习画刊(2019年9期)2019-11-08 07:59:11
设备管理与维修(2018年23期)2018-12-20 09:22:46
电子测试(2018年4期)2018-05-09 07:28:19
世界海运(2017年9期)2017-12-15 08:58:01
小天使·三年级语数英综合(2017年6期)2017-06-07 00:02:01
设备管理与维修(2016年5期)2016-03-16 02:20:50
舰船科学技术(2015年8期)2015-02-27 15:38:41
振动、测试与诊断(2014年4期)2014-03-01 01:14:11
海关与经贸研究(2014年3期)2014-02-28 14:30:47