HSST型磁浮列车悬浮电磁铁的优化设计
2013-06-19 09:09刘国清张昆仑
微特电机 2013年3期
刘国清,张昆仑,陈 殷
(磁浮技术与磁浮列车教育部重点实验室,四川成都610031)
0 引 言
HSST为日本首先提出的一种典型的电磁吸力型悬浮方式(EMS)[1],主要用于中低速磁浮列车,也是目前国内采用最为广泛、技术最为成熟的悬浮模式。研究单位主要以国防科技大学和西南交通大学为代表。2009年在唐车公司下线的磁浮列车和2011年在中国南车下线的磁浮列车均属于该类型。其实现列车悬浮于空中的力由安装于转向架上且置于F形轨道下方的U型悬浮电磁铁提供[2],可见,悬浮电磁铁是磁浮列车的重要部件,其性能直接决定着磁浮列车的悬浮稳定性和悬浮控制的难度。对电磁铁的研究一直是磁浮列车研究领域的热点,陈贵荣[3]研究了电磁铁设计的一般方法和提高电磁铁承载能力的方法,罗芳[4]利用有限元电磁仿真软件研究了气隙、横向错位、侧滚角等参数的变化对电磁铁悬浮力的影响,李云钢[5]系统地研究了电磁铁优化设计的问题。然而,单纯从电磁角度对电磁铁的研究并不能解决其在实际工程应用中所有问题,电磁铁作为受力部件,在工作过程中会由于受力而引发弯曲变形,这对电磁铁的悬浮力会造成一定的影响。
本文在前人研究基础上,提出了一种新型的电磁铁结构方案,这种方案采用“T”型翼缘,在提高浮重比的同时,大幅增加了电磁铁刚度,从而减小电磁铁形变对悬浮力的影响。为了验证改进的有效性,本文综合利用有限元和解析算法进行了验证。
1 电磁铁在工作过程中的变形
1.1 电磁铁在工作过程中的受力情况
电磁铁在工作过程中,其线包中通过电流,并在电磁铁极板和F形轨道中形成磁路,由此产生的电磁吸力与磁浮列车及其负载的重力相平衡,从而使磁浮列车稳定悬浮于线路上。在磁浮列车静浮与运行的过程中,整个列车配置的所有电磁铁组需负担整车重和负载,是典型的受力部件,图1示出了其中一组电磁铁的三维结构及其受力情况。
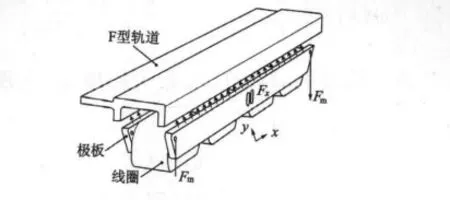
图1 电磁铁三维结构及其受力情况
有两种力作用在电磁铁上:一种是F形轨道对电磁铁的电磁吸力,其力的方向为向上;一种是磁浮列车转向架对电磁铁的反作用力,其力的方向为向下。
当磁浮列车处于正常工作状态时,电磁铁正对F形轨道并且稳定悬浮于额定的悬浮位置,此时由电磁铁组与轨道间产生的电磁力和磁浮列车转向架对电磁铁反作用力相平衡,由于电磁力可以看作均布荷载,所以有:

式中:Fm为转向架对电磁铁的反作用力;Fq为均布荷载;G为该段电磁铁负担的荷载。
1.2 电磁铁在工作过程中的弯曲变形
电磁铁受到垂直于截面轴线的电磁力和转向架的反作用力,其极板将发生弯曲变形,图2示出了电磁铁的受力和变形情况。
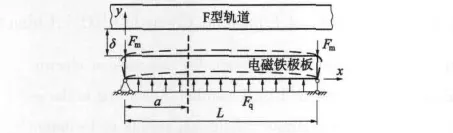
图2 电磁铁受力及变形简图
图2 中,电磁铁极板沿x方向任一截面a处的剪力Fa和弯矩Ma可以表示:
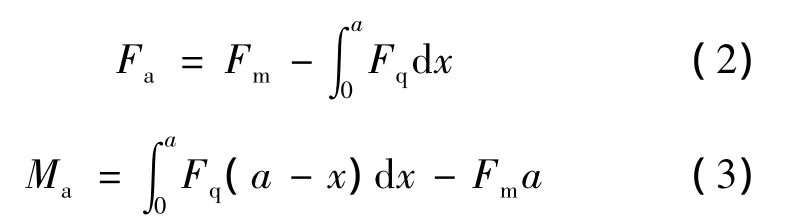
通过运算可以将式(3)变换成:

由于实际的电磁铁极板在发生弯曲变形后,其挠度远小于跨度,电磁铁极板变形的挠度方程可以表示[6]:

式中:E为弹性模量,与极板的材料有关;I为极板截面的惯性矩;C1、C2为积分常数,可通过边界条件ω(0)=0、ω(L)=0来确定,电磁铁极板的挠度方程最终可表示:

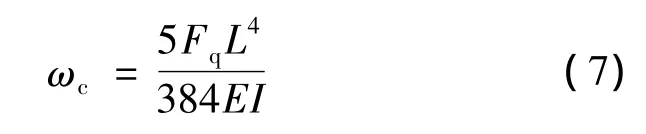
由于荷载的对称性,其最大挠度ωc出现在处,代入式(6)可得:
当电磁铁极板发生变形后,磁浮列车的悬浮气隙将不再是常量δ,而是一个沿x方向变化的量,可以表示:

悬浮气隙对电磁力来说是个敏感量,由变形引起的悬浮气隙的变化会导致电磁力的变化。电磁铁变形对电磁悬浮力的影响可以表示:

式中:Fd为变形后的电磁合力;Fh为变形前的电磁合力。
2 电磁铁的改进方案
2.1 对电磁铁极板的改进方案
目前HSST中低速磁浮列车电磁铁采用U型设计方案,如图3所示。
在先前分析的基础上,从改变电磁铁极板的形状入手来对电磁铁进行改进设计,改进设计还需综合考虑成本、电磁铁自重、加工难度等因素。
具体的做法是:通过改变电磁铁极板横截面形心的位置,即在电磁铁的极板上增加“T”型翼缘[6],从而提高电磁铁极板的刚度。图4为改进后的电磁铁极板横截面图。
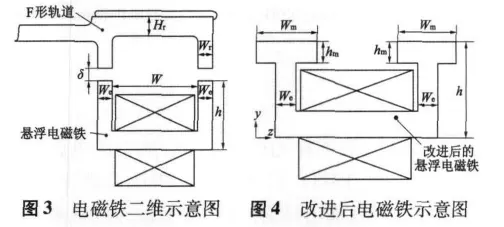
改进后的电磁铁在增加刚度后,其抗弯能力将会得到改善,同时电磁铁的磁极宽度Wm较原来的磁极宽度We也发生了改变,这必然会对电磁力产生影响。所以必须从变形和电磁力这两方面进行分析来衡量改进的效果。
为了验证改进方案对刚度和电磁力的影响,本文给出一个接近于实际使用中的电磁铁尺寸的算例。其具体尺寸如表1所示。
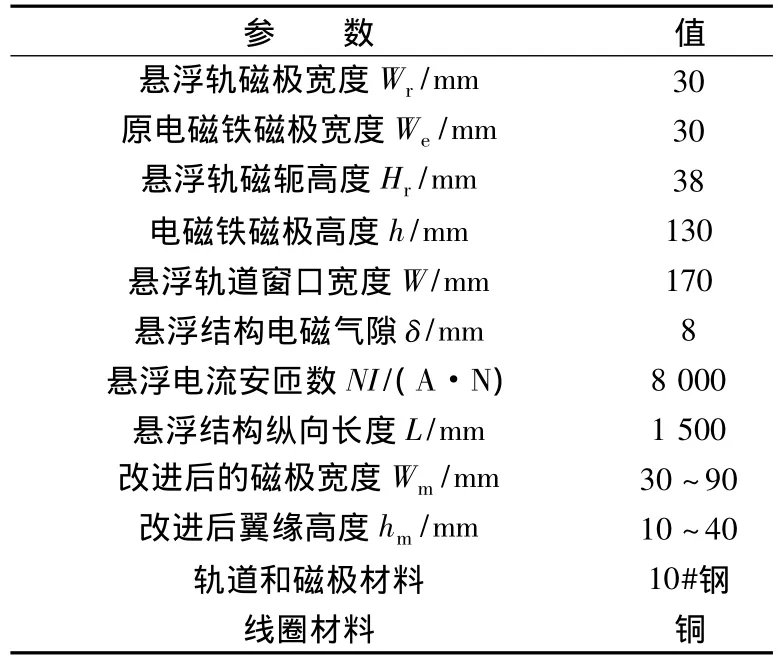
表1 悬浮电磁铁参数
2.2 改进后电磁铁的电磁力分析
利用有限元电磁仿真软件Ansoft对改进后和原电磁铁进行对比仿真,如图5所示。
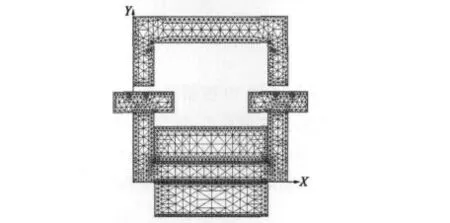
图5 改进电磁铁有限元模型
电磁铁极板在增加“T”型翼缘后会改变电磁铁的重量,单纯比较不同翼缘尺寸下电磁力的大小并不合适,所以采用浮重比来表示这一影响,其表达式:

在软件的后处理过程中,将式(10)输入,可得到不同磁极宽度下的浮重比,图6示出了不同的磁极宽度Wm下浮重比k的仿真结果。
通过仿真结果可以得出,随着磁极宽度的增加(30~90 mm),浮重比先增大后减小。当磁极宽度为45 mm时,有最大的浮重比。
图7示出了不同的翼缘高度hm下浮重比的仿真结果。
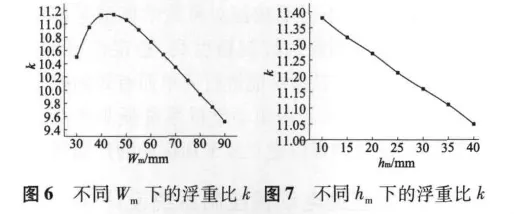
可以看出,随着翼缘高度的增加,电磁力几乎不变,而浮重比会减小。
2.3 改进后电磁铁的变形分析
通过增加“T”型翼缘,可以改变截面形心的位置,从而改变截面对形心轴惯性矩I的值[6]。从式(6)可以得出,电磁铁弯曲变形的挠度ω与其截面的惯性矩I成反比,通过增加截面的惯性矩可以有效地抑制弯曲变形。
通过前面的分析,可以将电磁铁磁极宽度定为45 mm,翼缘高度以10~40 mm的范围进行分析,表2示出了不同翼缘高度下计算出的惯性矩的值。
由表2可以看出,随着翼缘高度的增加,截面对形心轴惯性矩I的值将增大,但增加幅度会减小。综合考虑电磁铁重量、翼缘高度对电磁力的影响等因素,选择翼缘高度为20 mm。
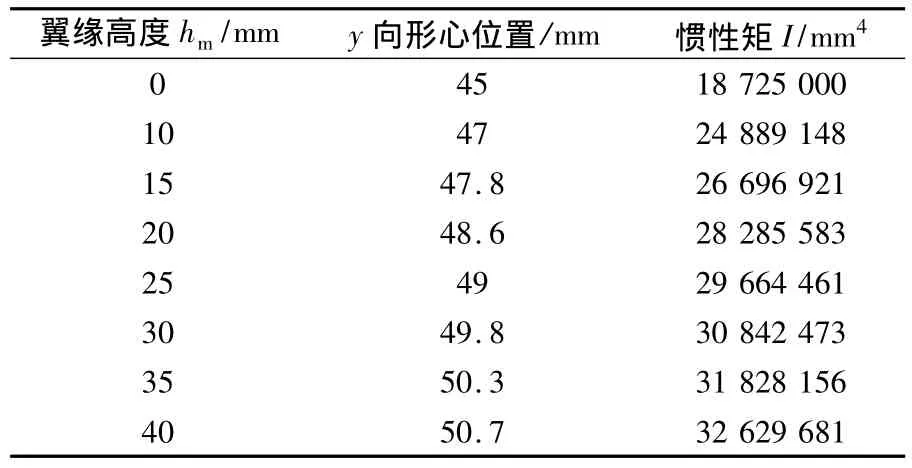
表2 不同翼缘高度下的形心位置和惯性矩
2.4 改进后电磁铁的综合分析
在电磁铁磁极宽度Wm为45 mm,翼缘高度km为20 mm的情况下,由图5可以得出:原电磁铁的浮重比为10.5,改进后电磁铁的浮重比为11.14。
利用式(7)可以得出:原电磁铁的最大挠度为0.26 mm,改进后电磁铁的最大挠度为0.17 mm。
在Ansoft中的仿真结果为:在额定悬浮位置时,原电磁铁在变形前的电磁力为15 849 N,变形后的电磁力为16 818 N。由式(9)可以得到,变形对磁浮力的影响σ1为6.1%;改进的电磁铁在变形前的电磁力为17 379 N,变形后的电磁力为18 015 N。由式(9)可以得到变形对磁浮力的影响 σ2为3.7%。
3 结 语
由于电磁铁是磁浮列车系统中的受力部件,在工作过程中将会发生弯曲变形,虽然现有的电磁铁在工作时变形量很小(约0.26mm),但由于变形会改变悬浮气隙的值,而气隙对于电磁力来说是敏感量,以现有电磁铁来说,变形后的电磁力将会增加到变形前的电磁力的106%左右。
通过在电磁铁极板截面上增加“T”型翼缘,可以改变截面的形心位置,并有效地增加电磁铁的弯曲刚度,从而有效地降低电磁铁在工作过程中的变形量,以现有电磁铁为对象的改进方案,可以将变形量降低到66%左右。
由于电磁铁极宽的适当增加,可以使其浮重比增加到原来的1.06倍。
本文提出的改进方法和算例可以为电磁铁的优化设计提供一定的参考。
[1]Yasuda Y,Fujino M,Tanaka M,et al.The first HSST maglev commercial train in Japan[C]//Maglev 2004 Proceedings.Shanghai(China),2004:76 -85.
[2]尹力明,陈贵荣.吸力型磁悬浮列车的悬浮电磁铁的设计原理和计算方法[J].机车电传动,1992(5):11 -30.
[3]陈贵荣,常文森,尹力明.磁悬浮列车悬浮电磁铁设计研究[J].国防科技大学学报,1993,15(4):10 -15.
[4]罗芳,张昆仑.磁悬浮列车U型电磁铁电磁力的数值计算与分析[J].机车电传动,2002(3):32 -35.
[5]李云钢,张晓,龙娟,等.EMS型低速磁浮列车U型电磁铁设计方法研究[J].国防科技大学学报,2011,33(6):159 -162.
[6]江晓禹,龚晖.材料力学[M].第4版.成都:西南交通大学出版社,2009.
猜你喜欢
重庆理工大学学报(自然科学)(2022年9期)2022-10-26
工业技术与职业教育(2022年4期)2022-08-29
盐城工学院学报(自然科学版)(2022年4期)2022-03-06
防爆电机(2021年5期)2021-11-04
力学与实践(2021年4期)2021-08-30
无线互联科技(2020年1期)2020-03-23
安阳工学院学报(2019年6期)2019-12-04
铁道学报(2019年8期)2019-10-18
哈尔滨工程大学学报(2017年3期)2017-04-08
中国学术期刊文摘(2016年2期)2016-02-13