基于闭环磁通门技术的超声波电动机电流测试系统
2013-06-19 09:09庄晓奇
微特电机 2013年3期
王 璐,杨 明,庄晓奇
(上海交通大学,上海200240)
0 引 言
超声波电动机具有体积小、重量轻、响应时间快、结构紧凑多样、力矩密度大、不受电磁干扰影响、适合间歇运行等优势。与传统电磁电机相比,能量转换效率低,限制了它的应用[1]。文献[2]提出通过调压和模糊控制算法,来提高其能量转换效率,并通过实验证明了其有效性[2]。文献[3]专门针对超声波电动机运行过程中的发热问题进行研究,提出了一套完整的基于温度反馈的闭环调频控制算法,控制了温升,进而提高能量转化效率。超声波电动机的驱动电流是与其输出功率密切相关的量,无论是从控制算法、温升或者其它角度去研究能量转化效率,最终都是与超声波电动机驱动电流密切相关的。但是专门针对不同驱动和运行条件下,驱动电流特性的研究很少,无法为研究进一步提高超声波电动机的输出效率、输出力矩等提供参考。为研究这一问题,首先需要搭建一套完整的、灵活性高、精度高、响应快、适合长时间测试的专门针对超声波电动机的电流测试系统。然而在公开发表的文献中,专门研究超声波电动机电流测试系统的较少,仅在文献[5]里有提及,用阻值很小的无感电阻将电流信号转换为电压信号。这种方法结构简单、成本低、搭建速度快,但是需要将电阻串接到驱动电路中,会对驱动电路本身阻抗特性有影响,导致驱动电流的测试精度较低。因为没有隔离,功率电路中的高电压可能通过反馈电路进入弱电的控制电路中,危及到控制系统的安全[6]。同时电阻本身消耗功率,发热严重,不能进行长时间测试。为了解决上述问题,搭建应用范围广、灵活性高、精度高、适宜长时间测试的系统,本文研制了基于闭环磁通门技术的超声波电动机电流测试系统。
1 超声波电动机电流特性与闭环磁通门测量电流原理
1.1 超声波电动机电流特性
行波旋转型超声波电动机是应用最广的一类超声波电动机,其等效电路模型如图1所示。其中:Rd表示压电陶瓷介电损耗,电容Cd为存储电荷能力,Lm1和Cm1表示定子存储动能和弹性势能的能力,Rm1表示定子振动的机械损耗。CF代表摩擦层存储弹性势能的能力,RF为摩擦损耗。Capplied为预压力施加机构的存储弹性势能的能力,RL为负载[7]。

图1 行波旋转型超声波电动机等效电路模型
超声波电动机本身是一个强耦合的系统,负载、温度(与能量转化效率,输出力矩等密切相关)等的变化都会引起电机等效电路模型参数的变化[4]。这些变化在驱动电压波形不变的条件下,都会引起驱动电流的变化。因此通过电流的精确测量,可以间接研究超声波电动机的能量转化效率、输出力矩等问题。
1.2 闭环磁通门测量电流原理
闭环磁通门测量电流具有测量精度高、动态特性好等特点,本研究采用闭环磁通门技术的传感器来检测电流,通过检测被测电流产生的磁场来间接检测电流。磁通门现象是电磁感应现象的一种,与变压器很相似,但是磁通门传感器和传统变压器的用途和结构不同。变压器铁心所处的磁场除了激磁磁场以外,还叠加了环境磁场,考虑环境磁场施加在铁心轴向的分量时,变压器产生的感应电动势:
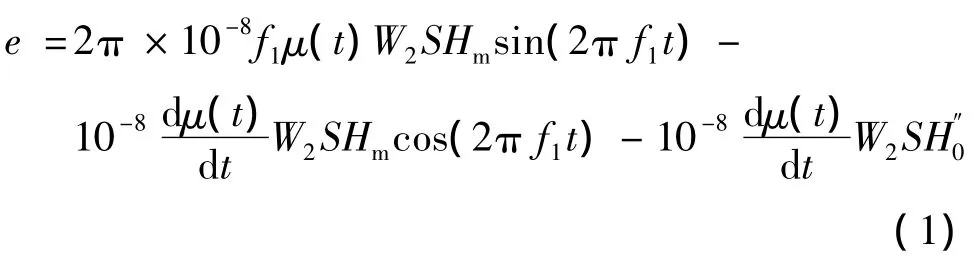
式中:e为感应电动势;μ为铁心的磁导率;S为横截面积;H为激磁磁场强度;W2为感应线圈匝数;Hs为铁心饱和磁场强度;Hm为激励磁场强度幅值。当比Hs和Hm小很多时,它对μ(t)的影响将非常小。μ(t)的傅里叶级数如下:

因此可得下式:

所谓闭环磁通门系统是指磁通门电路获取感应电动势中幅值相对较大的二次谐波分量,并经过信号调理电路变成模拟信号,然后将该模拟信号连接至相应的反馈线圈,产生变化的反馈电流,建立反馈磁场,与被测环境磁场代数相减,使变压器铁心工作在零磁通状态,两者达到平衡。闭环磁通门系统可以大大提高系统带宽和响应时间。
本系统的传感器设计为基于闭环磁通门技术的LEM电流传感器。主要优点为非接触测量、精度高、响应快,受共模干扰及温漂影响小,尺寸小。该传感器将磁通门和闭环反馈控制模块集成到一起,工作原理示意图如图2所示。
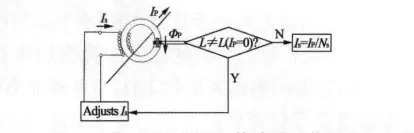
图2 LEM闭环磁通门传感器工作原理
图2 中,IP为被测电流,U(t)为输出,当原级被测电流通过时,产生磁场,聚磁环将其聚集到自饱和电感上,闭环模块反馈线圈电流Is,产生的磁场用来补偿原级产生的磁场,迅速使磁通门输出电路检测到零磁通,此时的Is值就与原级电流成比例,后级的电路将其转化为电压信号输出[9-10]。
2 测试系统设计
超声波电动机特殊的运动机理要求驱动电路必须在超声频段内提供两相具有一定相位差的同频、等幅的正弦交流电,本研究所用驱动电路为全桥型DC-AC逆变器。本研究仅测试其中一相驱动信号的电流。
测试平台的硬件部分有超声波电动机驱动电路、电流测试电路板、实时控制器及计算机;软件部分需要控制整个测试系统运行,同时在计算机上显示、保存一些测试结果。控制平台选用实验室美国国家仪器公司的实时控制器Compact RIO,编程语言为新一代图形化编程语言LabVIEW。整个系统的结构框图如图3所示。

图3 超声波电动机电流测试系统
2.1 硬件设计
超声波电动机的驱动频率一般在20~100 kHz之间[1],本研究所用的60型行波旋转型超声波电机的驱动频率为42 kHz左右,电压峰-峰值500 V左右。频率高、驱动功率大,同时要求测试精度要高。
根据具体的性能指标选择型号,一般要考虑线性范围与量程、灵敏度、精度、频率响应特性等因素[10]。其中LEM公司的电流传感器CAS 6-NP的线性度好,线性度误差仅为0.1%,响应时间为微秒级,带宽为300 kHz,本研究使用的超声波电动机驱动频率为41.2 kHz左右,满足要求。综上所述,本测试系统的电流传感器最终选为LEM公司非接触式采用闭环磁通门技术的CAS 6-NP。
除了包括闭环磁通门,传感器内部还有信号调理电路,包括初步的放大和加偏置。当被测电流为0时,传感器输出为2.5 V;当被测电流大于0时,输出大于2.5 V;当被测电流小于0时,输出小于2.5 V,因此,传感器的输出为2.5 V的直流偏置叠加脉动信号。最终传感器的输出阻抗是2 Ω,带负载能力强。
传感器信号处理电路首先是放大电路,其中放大芯片选用精密仪表运算放大器AD620。AD620精度高,具有高输入阻抗、高共模抑制比等特点,可以放大直流脉动信号,被测信号中有较大的直流偏置,放大器易于饱和,而真正希望放大的是脉动信号。因此在运放的反相输入端,加入可调节的直流电平,抵消被测信号中的直流偏置,仅放大两者的差值。最终放大倍数调节为31.8倍,直流偏置为2.37 V。CAS 6-NP的灵敏度为104 mV/A,因此整个测试系统的灵敏度为3.307 V/A,叠加一个(2.5-2.37)×31.8=4.134 V 的直流偏置。具体电路如图4所示。
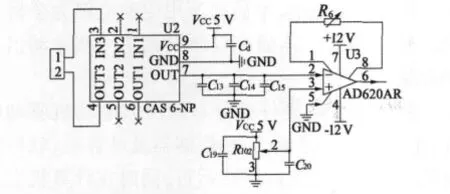
图4 传感器信号调理电路
2.2 软件设计
软件部分是基于实时控制器Compact RIO的新一代图形化编程语言LabVIEW。实现的功能主要是电流信号的采集、传输、显示等。
CompactRIO系统构架主要包括嵌入式实时控制器(NI Crio-9014)、可重配置 FPGA(NI Crio-9112)、及模块化 I/O(NI9201)CompactRIO的 RIO
(FPGA)核心内置数据传输机制,负责把数据传到嵌入式处理器,以进行实时分析、数据处理、数据记录或与联网主机通信。所有I/O模块都包含内置的接口、信号调理、转换电路(如ADC或DAC)等。
电流信号的采集通过LabVIEW编程控制FPGA和AI模块NI 9201来实现。
然后传输到实时控制器进行显示、分析。程序框图如图5所示。

图5 测试系统LabVIEW程序框图
3 系统测试
3.1 实验装置
整个测试系统实物图如图6所示,包括电机驱动电路和Compact RIO控制器(已装箱),电流检测电路板,波形监测示波器,计算机及商用直径60 mm的行波旋转型超声波电动机。
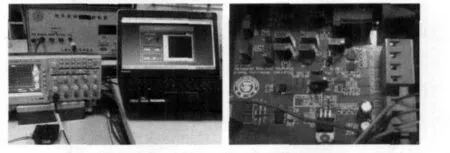
图6 测试系统实物图
3.2 实验及结果分析
试验电机为直径60 mm的行波旋转型超声波电动机,固定两相驱动信号的幅值、相位差,调节驱动频率,记录电流检测电路输出波形的频率及峰-峰值。分别调节驱动频率为42 kHz和43.4 kHz,电流测试结果如图7所示。

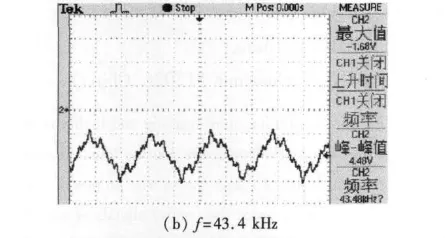
图7 系统测试结果
当驱动频率为42 kHz时,电流检测电路输出信号频率为42 kHz,峰 - 峰值为3.84 V,CAS 6-NP的灵敏度为104 mV/A,经计算,峰值电流为0.58 A。
当驱动频率为43.4 kHz时,电流检测电路输出信号频率为43.4 kHz,峰-峰值为4.48 V,CAS 6 -NP的灵敏度为104 mV/A,经计算,峰值电流为0.68 A。
实验结果表明,电流检测电路输出信号的频率与驱动频率一致。不同驱动频率时,单相的驱动电流会跟随频率有明显变化。
当驱动频率从42~43.2 kHz变化,步长为100 Hz,电流测试波形的峰峰值如图8所示。

图8 驱动频率变化时电流测试波形峰峰值
从图8可以发现,驱动频率在接近42.7 kHz时,驱动电流较大,驱动电路处于谐振状态;当驱动频率在接近42.9 kHz,驱动电流较小,驱动电路处于反谐振状态。由图7和图8可以看出,驱动电流的检测可以为超声波电动机特性的研究提供参考[11]。同时,在整个测试过程中,传感器未发现明显温升,接近于室温。
4 结 语
本文首先分析了测试超声波电动机驱动电流的必要性,然后介绍了闭环磁通门测量电流的原理。搭建了基于闭环磁通门传感器CAS 6-NP的电流测试系统,实验证明该系统灵敏度高,适合长时间测试。
[1]赵淳生.超声电机技术与应用[M].北京:科学出版社,2007:203-205.
[2]Liu bo,Shi jingzhuo.Variable step - length efficiency optimum control of traveling wave ultrasonic motor system[J].Advanced materials research,2012:383 -390.
[3]郭超,杨明,李世阳.基于温度反馈的超声波电动机速度控制系统[J].微特电机,2012,40(5):62 -64.
[4]Bal G,Bekiroglu E.A highly effective load adaptive servo drive system for speed control of travelling - wave ultrasonic motor[J].IEEE Transactions on Power Electronics,2005,20(5):1143 -1149.
[5]雷向红,曾劲松,李伟.基于阻抗角特性的超声电机驱动控制研究[J].微电机,2011,44(3):71 -74.
[6]陈伟,张英,刘增玉.两种保护用电流采样电路的比较及应用[J].精密制造与自动化,2007(1):45 -46.
[7]颜佳佳,阮新波.旋转型行波超声电机的等效电路模型[J].中国电机工程学报,2009,29(15):80 -85.
[8]张学孚,陆怡良.磁通门技术[M].北京:国防工业出版社,1995.
[9]Yang Xiaoguang.The optimization of dual- core closed - loop fluxgate technology in precision current sensor[J].Journal of Applied Physics,2012,111(7):07E722 -07E722 -3.
[10]LEM.Solated current and voltage transducers[M/OL].3rd ed.http://LEM.com.
[11]祖家奎,赵淳生.行波型超声电机频率自动跟踪控制技术评述[J].微电机,2007,37(6):47-49.
猜你喜欢
大电机技术(2022年5期)2022-11-17
大电机技术(2022年2期)2022-06-05
大电机技术(2022年2期)2022-06-05
防爆电机(2021年4期)2021-07-28
上海大中型电机(2021年2期)2021-07-21
弹箭与制导学报(2018年1期)2018-11-13
黑龙江电力(2017年1期)2017-05-17
环境科技(2016年5期)2016-11-10
智能建筑电气技术(2015年5期)2015-12-10
智能建筑电气技术(2015年5期)2015-12-10