永磁无刷直流电动机的自学习模糊PI控制
2013-06-19 09:09雷金莉窦满峰
微特电机 2013年3期
雷金莉,窦满峰
(西北工业大学,陕西西安710072)
0 引 言
永磁无刷直流电动机结构简单、体积小、运行可靠、维护方便、调速性能好,永磁无刷直流电动机没有励磁损耗、效率高、功率密度高,在航空、航天领域的电动力系统中得到了广泛的应用。航空航天用电动力系统运行环境特殊,空气密度、温度、压强等大气参数的变化会引起驱动电机参数以及负载特性的变化,因此,航空航天用驱动电机系统呈现出明显的强耦合性、参数不确定性及恶劣飞行环境下干扰未知等非线性特性[1,2]。
通常直流电机调速系统采用常规PID控制。常规PID控制算法简单、控制精度高、稳定性好、易于实现,但对于非线性、参数不确定性被控对象,PID控制参数整定非常困难,难以取得理想的控制效果。随着现代控制理论和智能控制理论的不断发展,将智能控制、现代控制以及常规的PID控制等多种控制方法相融合,发挥各自优点,实现高度组合智能控制成为当前的发展趋势和研究热点[3-8]。
本文将自学习模糊控制与PI控制相结合构成自学习模糊PI控制系统,既具有模糊控制鲁棒性强、动态响应好、不需要被控对象数学模型等特点,又发挥了PI控制器的控制精度高、稳定性好的特性,对复杂的非线性系统能进行简单而有效的控制,正适合解决航空航天用驱动电机系统强非线性、强耦合性、准确模型难以建立及未知扰动的控制问题。
1 永磁无刷直流电动机控制系统设计
航空航天用永磁无刷直流电动机工作环境复杂,控制精度和稳定性要求高,而外界大气参数的变化时,电机的定子电阻、转动惯量及负载转矩也随之发生变化,且外界环境的变化是不可预知的。由于电机参数变化的不确定性,难以建立精确的数学模型,常规的PID控制不能满足系统的控制需求。而自学习模糊控制不需被控对象的数学模型,鲁棒性强,对强非线性和滞后的过程或对象有较好的控制效果,但单纯的自学习模糊控制稳态品质较差,因此本文将自学习模糊控制与PI控制相融合,扬长避短。自学习模糊PI控制算法既具有自学习模糊控制算法不需要准确数学模型、鲁棒性强、控制参数可及时自动调整、动态品质好等优点,同时又具有PI控制稳态精度高、稳定性好等特点,非常适合航空航天驱动电机非线性系统控制[9-11]。
本文设计的永磁无刷直流电动机控制采用转速、电流双闭环串级控制,电流环采用限幅和PI控制算法,速度环采用自学习模糊PI控制算法,控制系统结构框图如图1所示。
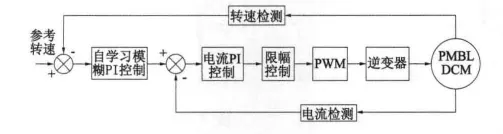
图1 永磁无刷直流电动机控制系统结构框图
2 自学习模糊PI控制器设计
2.1 结构设计及工作原理
自学习模糊PI控制器包括自学习模块、模糊控制模块及PI控制模块三个部分。控制器的输入是转速误差e和转速误差变化率ec,控制输入为转速控制量,其结构框图如图2所示。

图2 自学习模糊PI控制器结构框图
自学习模块由偏差测量、控制校正和规则修改三部分组成,其中偏差测量是测量期望输出与实际输出之差,确定输出响应需要的校正量;控制校正是将需校正的输出响应量转变为需校正的控制量;规则修改是通过修改模糊控制规则来实现校正量。模糊控制模块包含了模糊化、模糊控制规则建立、解模糊化三个过程,其输入是转速误差e和转速误差变化率ec,输出为PI控制器的调节参数 kp、ki。当有外界干扰或驱动电机参数变化时引起输出量偏离设定值时,自学习模块通过对反应输出量大小的误差信号的测量,获得需要校正的输出响应量,将其转换成需校正的控制量。根据控制量修改模糊控制规则,从而调整PI控制的调节参数,达到调整转速输出控制量,以抵制外界干扰或对象参数变化对系统的影响。
2.2 输入、输出量模糊化
自学习模糊PI控制器输入变量为转速误差e和转速误差变化率ec,用模糊控制规则在线修改PI控制器参数,自学习模糊控制器的输出量为比例参数kp和积分参数ki。e和ec定义:


式中:n(k)为k时刻的转速,T为采样时间。
e和ec的论域量化为13个等级:{-6,-5,-4,-3,-2,-1,0,+1,+2,+3,+4,+5,+6},输出变量kp、ki的论域量化为15个等级:{-7,-6,-5,-4,-3,-2,-1,0,+1,+2,+3,+4,+5,+6,+7}。输入变量和输出变量的模糊集均选用7个词汇来表示:{NB,NM,NS,ZE,PS,PM,PB},结合无刷直流电动机的调速特性,各输入、输出变量的隶属度函数采用三角形隶属函数。
2.3 控制规则确定及自学习算法设计
2.3.1 模糊控制规则生成
模糊控制规则是专家的经验和操作者的技能加以总结而得出的模糊条件语句的集合,此集合能够保证控制器输出能使系统的动静态特性最佳。kp、ki调整规则应遵循:误差很大时,为使系统响应快,防止出现积分饱和现象,kp应较大、ki应很小;误差适中时,为了避免对系统动态性能影响,kp应取得小些,ki的取值适当;误差很小时,应增大积分作用,以减小稳态误差,即ki应很大。
根据上述调整原则,并结合以往的电机控制经验,可得到kp、ki模糊控制规则如表1、表2所示。
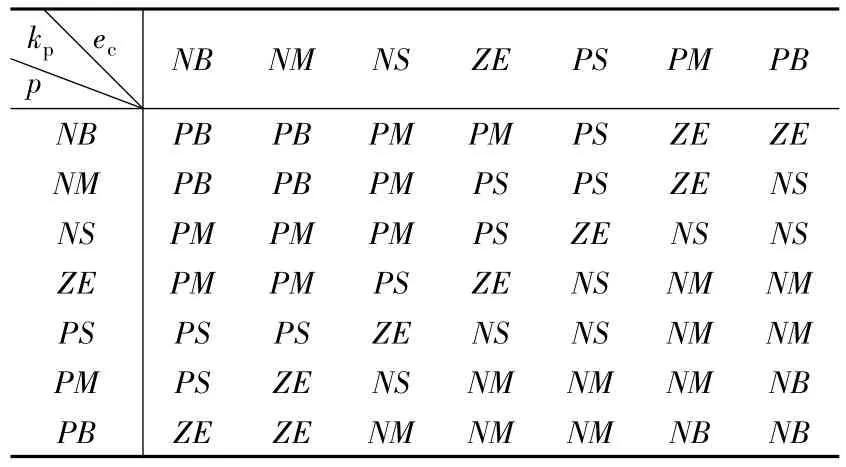
表1 kp模糊控制规则表
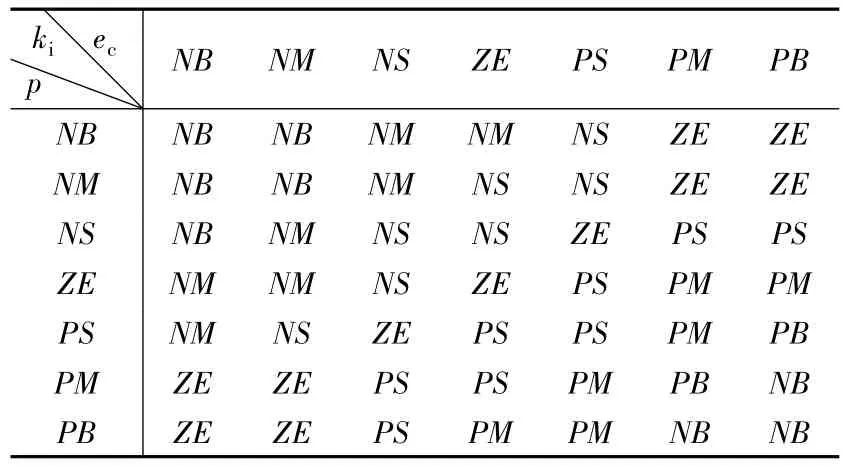
表2 ki模糊控制规则表
2.3.2 自学习算法设计
模糊控制规则的设计是实现系统良好控制品质的关键,而永磁无刷直流电动机参数具有不确定性、耦合性等特性,这些都会造成由模糊控制规则所得的控制效果不能令人满意。自学习算法根据期望输出值与实际输出值的偏差在线自动修改模糊控制规则,从而使系统输出快速稳定于期望值。
自学习算法的输入变量取转速误差e和转速误差变化率ec,输出量即为控制规则的校正量Δ,设:

式中:λ1、λ2分别反映模糊控制规则修改中实际输出接近期望输出的程度和速度,一般可取1>λ2>λ1>0。
在任一时刻,模糊器的输出是e和ec触发的m条规则共同作用的结果。当外界有扰动或系统参数变化时,自学习模块测量e和ec,计算得出校正量Δ,根据λ1和λ2的大小分配校正量Δ对各条控制规则的修改量,若原控制规则:

考虑校正量之后,模糊控制规则改为:

2.4 模糊推理
本文模糊推理采用Mamdani模糊合成推理法,解模糊采用均值判决法。由输入速度误差e和误差变化率ec,参照上述模糊规则表得到PI控制器参数的修正值,并代入下式对PI控制器参数进行实时修正。
式中:kp0、ki0为初始PI控制参数。
3 仿真实验
本文以MATLAB/Simulink为仿真环境,采用模糊逻辑工具箱和电气系统工具箱中的相应模块,进行了永磁无刷直流电动机控制系统的仿真实验。实验用永磁无刷直流电动机参数:额定电压500 V,电枢相电阻2.85 Ω,定子绕组的电感8.5 mH,电机转动惯量0.000 8 kg·m2,极对数 p 为 4。
图3为采用常规PI控制算法和自学习模糊PI控制算法的转速响应曲线。对比仿真结果可以得出:采用自学习模糊控制PI方法的电机系统响应时间约为40 ms,无超调;在PI控制算法下系统超调约为6.7%,响应时间为60 ms。
图4为在0.1 s突加负载情况下,采用常规PI控制算法和自学习模糊PI控制算法的转速响应曲线。从仿真结果可知:在自学习模糊PI控制算法下,系统超调约为5%,响应时间约为30 ms;而PI控制方法下系统超调约为6%,响应时间约为35 ms。
图5、图6分别为电机转动惯量由0.000 8 kg·m2变为0.001 2 kg·m2时,采用常规 PI控制算法和自学习模糊PI控制算法的转速响应曲线。比较仿真曲线可以得出:当电机转动惯量增大时,采用自学习模糊控制PI算法的系统无超调,响应时间由40 ms增至55 ms;PI控制算法下,系统的超调量从6.7%上升至10%,响应时间从60 ms增至90 ms。
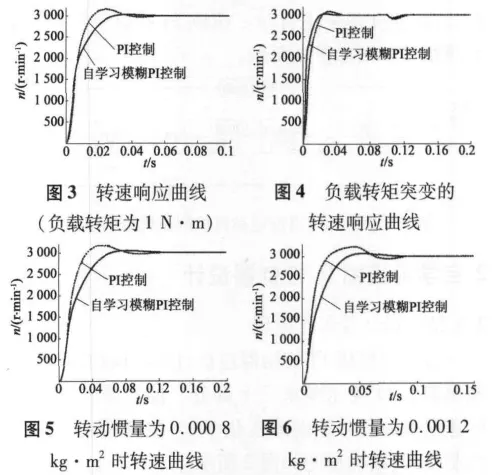
综上所述,采用自学习模糊PI控制算法的永磁无刷直流电动机系统响应快、无超调,在负载和电机参数发生变化时,系统的超调及响应时间变化不明显,鲁棒性强,可以较好地解决航空航天用驱动电机的非线性、不确定性控制问题。
4 结 语
本文针对航空航天用永磁无刷直流电动机的强非线性、不确定性特性,设计了自学习模糊PI控制算法,并在MATLAB/Simulink环境下建立了永磁无刷直流电动机电流、转速双闭环控制系统仿真模型,结合实例电机进行设计算法验证实验。仿真实验结果表明:采用自学习模糊PI控制算法的永磁无刷直流电动机系统稳态无误差、动态响应速度快、无超调,当电机负载扰动和电机内部参数变化时,系统具有自适应控制能力,响应时间和超调变化较小,鲁棒性强,解决了航空航天用永磁无刷直流电动机强非线性、强耦合性及不确定性等实际控制问题,具有一定的理论意义和应用价值。
[1]Schmidt D K.Dynamic modeling of control and station - keeping guidance of a large high altitude near space air- ship[R].AIAA Guidance,Navigation,and Control Conference and Exhibit,2006,6781:1-14.
[2]罗玲,刘卫国,窦满峰,等.高空飞艇螺旋桨驱动电机分析[J].宇航学报,2009,30(6):2140-2144.
[3]Bristrol E H.On a new measure of interaction for multivariable process control[J].IEEE Trans.Autom Control,1966(1):133 -134.
[4]纪志成,李晓庆,沈艳霞.无刷直流电机的模型参考模糊自适应方法及实验研究[J].电工技术学报,2006,21(1):75 -81.
[5]Ge M,Chiu M,Wang Q.Robust PID controller design via LMI approach[J].Journal of Process Control,2002(12):3 - 13.
[6]纪志成,沈艳霞,薛花.无刷直流电机自适应模糊控制的研究[J].中国电机工程学报,2005,25(5):104 -109.
[7]李红伟,谌贵辉,尚泽明.无刷直流电机的变论域模糊自适应PID控制系统设计[J].江南大学学报(自然科学版),2009,8(1):49-53.
[8]支长义,王瑞玲,唐道奎,等.无刷直流电动机模糊自适应PID控制策略研究[J].电力系统保护与控制,2010,38(8):35-37.
[9]李宏,王崇武.永磁无刷直流电机模糊自适应控制器设计[J].计算机仿真,2011,28(2):209 -212.
[10]刘兴艳,上官璇峰,董洋洋,等.基于P-模糊自适应PID控制的无刷直流电动机调速系统[J].工况自动化,2010(7):45-49.
[11]徐湘元.自适应控制理论与应用[M].北京:电子工业出版社,2007.
猜你喜欢
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年6期)2020-12-14
纺织科学研究(2020年1期)2020-05-21
制造技术与机床(2017年6期)2018-01-19
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
西北工业大学学报(2015年1期)2016-01-19
舰船科学技术(2015年8期)2015-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01