电励磁双凸极电动机换相转矩脉动的研究
2013-06-19 09:09邹治锐陈世元
微特电机 2013年3期
邹治锐,陈世元
(华南理工大学,广东广州510640)
0 引 言
电励磁双凸极电动机(以下简称DSEM)类似双凸极永磁电机,具有结构简单、控制灵活、力矩电流比大、功率密度高等优点,在航空电源、风力发电、电动汽车等领域有着广阔的应用前景[1-2]。DSEM同样无法避免磁阻类电机所存在的转矩脉动问题。
DSEM转矩脉动产生的原因有多方面,主要源于两种情况:一种是电磁因素造成的转矩脉动,通电绕组电流并不是理想的方波电流,会导致电磁转矩存在原理性波动[3];另一种是电流换向产生的转矩脉动,对输出转矩的影响比较大[4]。本文重点分析在通电状态改变下换向电流的变化过程,研究换相转矩脉动产生的原因,为DSEM电机的转矩优化提供一定的参考意义。
1 电机结构原理
图1是一台三相15 kW、12/8极外转子DSEM轮毂电机剖面图。A、B、C三相电枢绕组和励磁绕组均放置在定子上,转子上没有绕组。选择其中4个沿圆周均匀分布且空间相对的定子槽,加深其深度和宽度以放置励磁绕组[5]。

图1 DSEM轮毂电机剖面图

图2 理想电感波形与电流波形
设计DSEM电机一般采用开关磁阻电动机的设计原则,选择转子极弧略大于定子极弧,这是为了保证在任何转子位置时均具有正、反向自起动能力以及相绕组的换流[6-7],本文转子极弧取 18°。理想的电感波形与电流波形如图2所示,根据电感上升区间通正电流、电感下降区间通负电流、电感不变区间不通电的原则,故通电模式为三相六状态,有些类似于无刷直流电动机的通电模式。三相绕组为星形连接,主电路采用全桥控制电路,如图3所示。

图3 全桥控制电路
2 换相转矩脉动分析
2.1 B+C-相导通向B+A-相导通换相过程
参照图2的通电规律,分析B+C-相导通向B+A-相导通换相过程:开关Q3保持开通状态不变,B相绕组电流持续,Q6关断的同时Q2开通,A相绕组电流由零开始负向上升,由于电感的存在,C相绕组不能马上变为零,而是通过与二极管D5续流,等效电路如图4所示。
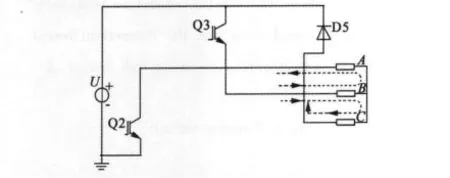
图4 B+C-向B+A-换相等效电路
假设绕组电感忽略不计,B+C-导通向B+A-导通换相瞬间,有 eb= -ec=E,ea=0,U=eb-(-ec)=2E,故电压平衡方程式:

解上述方程组得:
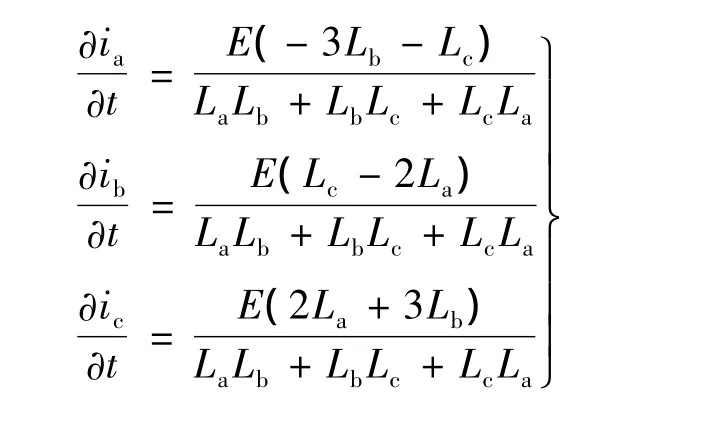
参照图2的理想电感波形,有La=Lmax,Lc=Lmin,Lb比Lmin大一些,令 Lb=L2nd,则方程组可改为:

2.2 B+A-相导通向C+A-相导通换相过程
分析B+A-相导通向C+A-相导通换相过程:开关Q2保持开通状态不变,A相绕组电流持续,Q3关断的同时Q5开通,C相绕组电流由零开始上升,由于电感的存在B相绕组不能马上变为零,而是通过与二极管D4续流,等效电路如图5所示。
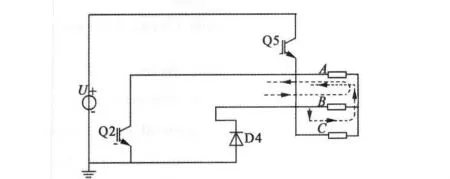
图5 B+A-向C+A-换相等效电路
同理,B+A-导通向C+A-导通换相瞬间,有eb= -ea=E,ec=0,U=eb-(-ea)=2E,故电压平衡方程式:

解方程组得:
同理有 Lb=Lmax,Lc=Lmin,La比Lmin大一些,令La=L2nd,则方程组可改为:


可以看出的正负性不明显,换向相B相处于电感不变区间理论上不产生转矩;换向相C相的电流从零开始正向上升;一般情况下,DSEM中最大电感值要大于两倍的最小电感值,故非换向相A相的电流变化率偏小于零,因为A相为负电流,电流会继续负向增大,但由于电流滞环控制电路的作用使得电流不会继续增大,故A相电流可以保持在稳定的范围内。
3 仿真结果分析与改善
利用ANSOFT公司开发的电磁场有限元分析软件Maxwell和ANSOFT公司的另一款电路仿真软件Simplorer进行联合仿真,搭建横跨电场与磁场的耦合场瞬态仿真模型,实现电路、控制、磁场三方的同时仿真,具有较高的仿真精度,非常适合电机控制系统的仿真分析。
在Maxwell中建立DSEM电机模型,在Simplorer中加入全桥电路及电流滞环控制电路,得到的三相电流仿真波形如图6所示。可以看出B+C-向B+A-换相时非换向相B相电流有明显的下降,即使有电流滞环电路也阻挡不了电流下降的趋势;换向相A相电流变化的时间要比C相长一些,均与理论分析吻合。

图6 三相电流波形
图7 是输出转矩曲线图,电流换向时电流未达到稳定电流参考值,使得转矩出力变小,从而输出转矩形成凹陷,产生脉动。
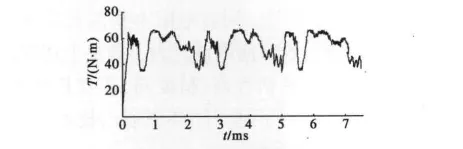
图7 转矩曲线
由于三相绕组是星形连接,在全桥电路控制下,换向相电流的变化易引起非换向相电流的变化,图6已经表明这种情况。

图8 半桥控制电路
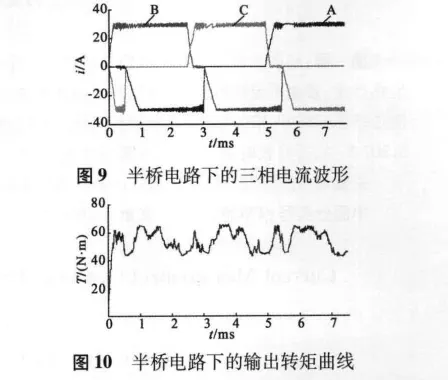
图8 是半桥控制电路引入电容的中点电位,使三相绕组工作互不干扰,有利于独立控制[8]。在电流滞环控制下,三个绕组无需限制在ia+ib+ic=0的条件下,非换向相电流很好地控制在一个波动较小范围内,三相电流波形如图9所示。非换向相电流凹陷的消除使得输出转矩脉动有所减小,如图10所示。
半桥控制电路有一定的局限性,要求分裂式电容充放电保持平衡,维持中性点电压稳定,则需要某一换向相绕组电流反向(正到负或负到正)达到给定值,另一换向相恰好关断完毕[8](电流为零),因而图2中传统的通电方式需要进行角度优化,以满足电容充放电平衡。
4 结 语
理想的方波电流才能产生较为平稳的转矩,通过分析从一个通电状态到另一个状态换向电流瞬间变化的过程,研究换相转矩脉动产生的原因,换向相电流正向上升到正的稳定电流参考值或负向上升到负的稳定电流参考值需要一定的时间,非换向相电流的凹陷都对换相转矩脉动产生影响,软件仿真验证了结论的正确性。
与全桥电路相比,半桥电路消除了换向过程中非换向相电流产生的凹陷,很好地保持非换向相电流的稳定,对转矩脉动有一定的改善,但要求满足电容充放电平衡,否则电容的中性点电压不易稳定,因而需要角度优化控制,通过调整开关管的通断区间来维持电容充放电平衡。
[1]孔祥新,程明,束亚刚,等.定子双馈电双凸极电动机转矩脉动分析与抑制[J].电工技术学报,2008,23(5):18 -22.
[2]张乐.电励磁双凸极电机转矩脉动分析与抑制[J].中国电机工程学报,2010,30(3):83 -89.
[3]谭建成.永磁无刷直流电机技术[M].北京:机械工业出版社,2011,3:177 -178.
[4]相蓉,周波,孟小利.电励磁双凸极电机转矩脉动分析与抑制[J].南京航空航天大学学报,2001,33(4):366 -371.
[5]余海阔,陈世元.电励磁双凸极轮毂电机空载性能的有限元分析[J].微电机,2011,44(6):23 -26.
[6]李永斌,龚宇,江建中.双凸极永磁电机斜极转子设计和绕组换流模式研究[J].电工技术学报,2005,20(7):70 -75.
[7]李永斌.定子双馈双凸极永磁电机及其控制系统研究[D].上海:上海大学,2004,6.
[8]李国生.基于半桥变换器的电励磁双凸极电机角度优化控制策略[J].中国电机工程学报,2011,31(27):102 -108.
猜你喜欢
电工技术学报(2022年20期)2022-10-29
大电机技术(2022年3期)2022-08-06
重庆理工大学学报(自然科学)(2022年5期)2022-06-18
微电机(2022年1期)2022-03-21
河北电力技术(2021年2期)2021-07-29
汽车维护与修理(2019年3期)2019-08-08
汽车维护与修理(2018年5期)2018-09-29
汽车维护与修理(2018年23期)2018-07-03
电子制作(2018年1期)2018-04-04
汽车维护与修理(2017年5期)2017-11-17