
鱼雷试验中雷靶水声信号识别方法
2013-05-28 06:00侯代文
水下无人系统学报 2013年1期
孙 涛, 侯代文
鱼雷试验中雷靶水声信号识别方法
孙 涛, 侯代文
(中国人民解放军 91439部队, 辽宁 大连, 116041)
在鱼雷试验中,为了能及时有效地掌握鱼雷水下工作情况,需要第三方监测设备对鱼雷和目标靶信号进行实时记录和分析,为事后恢复现场查找问题提供有力的数据支持。本文通过分析鱼雷试验现场的基本情况,提出了一种基于快速傅里叶变换(FFT)技术的时域和频域相结合的雷靶信号识别方法。鱼雷试验中使用该雷靶监测设备时的信号监测效果,验证了该方法的有效性。
鱼雷; 实航试验; 信号识别; 雷靶监测设备; 快速傅里叶变换
0 引言
在鱼雷科研试验中, 对鱼雷发现、跟踪和攻击目标等作战能力以及自导作用距离等战术技术指标的考核, 是通过鱼雷攻击目标靶标试验实现的[1-2]。在海上试验过程中, 经常发生鱼雷不能正常攻击靶标的情况。造成这种情况有两种可能, 一种是鱼雷自身的问题; 另外一种是目标靶标的问题。除了非常明显的鱼雷或者目标靶自身问题, 比如机械故障, 电子器件烧毁等原因比较容易确定的情况外, 大部分情况是鱼雷和目标靶都没出现明显异常, 而鱼雷也未能按照预定流程动作。对鱼雷和目标靶各自的应答数据进行分析处理后, 发现问题一般出在鱼雷寻的信号和目标靶应答信号的匹配上。此时鱼雷设计方一般认为最有可能的情况是目标靶对水声信号的错误应答导致鱼雷判断错误。为了深入了解目标靶在收到鱼雷寻的信号后发出应答信号的情况, 从而对故障进行准确定位, 需要第三方设备对试验现场水声信号进行实时记录和分析, 并为事后恢复现场查找问题提供数据支持。
为此, 研制了雷靶监测设备, 用于记录试验过程中的鱼雷寻的信号和目标靶的应答信号, 并以此为基础, 对鱼雷和目标靶的应答情况做出评判, 实现故障准确定位, 从而对鱼雷性能做出客观公正的评价。
本文根据海上鱼雷试验过程中雷靶工作的基本态势, 利用雷靶监测设备测量到的水声信号, 提出了时域和频域相结合的雷靶信号识别方法。并利用海上鱼雷试验中鱼雷和目标靶的实际工作情况与本文方法评判情况的对比结果, 验证所提出方法的有效性。
1 鱼雷性能考核试验的方案设计
试验海域水深约60 m, 试验时海况小于3级。目标靶由测量船舷侧布放到水下约40 m的海水中。试验开始后, 鱼雷从距离测量船1 000~2 000 m的地方入水。开始的40 s内, 目标靶发射模拟舰船航行噪声, 鱼雷在该噪声的导引下, 向噪声源即目标靶方向运动, 同时发射周期为3 s的寻的信号。40 s后目标靶停止发射噪声, 进入被动应答模式, 开始应答鱼雷寻的信号。鱼雷根据目标靶的应答信号快速向目标靶靠近, 在距离目标靶300 m时发射周期变为1.5 s, 在距离目标靶50 s时开始规避远离目标靶。整个鱼雷运行轨迹如图1所示[1]。

图1 鱼雷性能考核试验时试验态势图
受现场条件限制, 雷靶监测系统布放在目标靶另一侧的船舷外面, 距离目标靶约20 m, 与目标靶布放在同一深度。鱼雷入水前5 min, 雷靶监测系统开机, 全时段接收并记录鱼雷发出的寻的信号和目标靶的应答信号。
2 雷靶信号特征分析
在试验中, 雷靶监测系统最重要的任务是准确地记录鱼雷寻的信号和目标靶应答信号, 并对误答和漏答情况做出判断。
从上一节的雷靶应答过程可知, 鱼雷寻的信号和目标靶的应答信号在时域和频域具有明显特征。
1) 目标靶总是在接收到鱼雷的发射信号之后才会应答, 从时域上来看, 发射信号总是在应答信号之前, 且信号的幅度、持续时间和周期等均已知;
2) 鱼雷发射信号的频率和应答信号的频率已知, 通过频谱分析, 可以快速识别出接收到的信号中是否含有发射信号和接收信号。
基于以上两点, 从雷靶监测系统接收到信号的出现时刻、幅度、持续时间、周期和频率等几个方面联合判断, 可以判断识别发射信号和应答信号。但实际的数据分析发现, 有很多因素会影响信号的时域和频域特征, 包括信号的出现时刻, 信号幅度、持续时间和频率等, 进而影响对信号的准确判断。概括起来, 影响因素主要包括以下几个方面。
1) 换能器姿态对信号幅度的影响
由于换能器具有指向性, 故其接收到的信号强度受自身位置、角度的影响很大。在海水浪、流和涌的影响下, 雷靶监测系统水听器姿态在水下不断变化, 即使到达换能器的信号强度没有任何变化, 雷靶监测系统接收到的信号在幅度上也是高低起伏变化的, 难以识别, 易造成误判和漏判。
2) 鱼雷运动位置、角度和传播损失对信号幅度的影响
鱼雷在运动过程中, 相对于雷靶监测的位置、角度在不断地变化。同样的, 受换能器指向性的影响, 雷靶监测系统接收到的信号幅度跳变厉害, 即使距离很近, 由于设备角度问题, 雷靶监测系统接收到的信号幅度很小甚至完全被噪声淹没, 这容易造成应答错误或无应答的情况。
3) 多普勒频移对信号频率的影响
当鱼雷按照一定速度在水中运动时, 雷靶监测系统信号的频率会发生改变, 信号频率改变的部分即多普勒频偏, 计算公式为[3]



4) 混响对信号识别的影响
在浅海海域, 由于鱼雷位置距离海面和海底的声程较短, 使得水声信号受到海底和海面的反射造成的混响严重。混响叠加在发射和接收信号上面, 对信号的时域波形造成很大的干扰; 同时, 由于多普勒效应的存在, 使得混响部分信号频率复杂多变, 既包括已知频率分量的信号, 也包括未知频谱分量的信号。对混响严重的信号判别无论是从时域还是频域两方面都容易造成误判和漏判。
从以上分析可以看出, 雷靶监测系统接收到的雷靶应答信号实际上是在幅度、频率都存在变化的复杂连续信号。单一的时域频域分析方法难以从这些复杂的信号中, 识别出鱼雷和目标靶的应答情况, 因此需要多种手段多种方法结合才能实现。
3 雷靶信号识别方法及实例分析
3.1 雷靶监测系统对雷靶信号的识别方法
从上一节雷靶信号特征分析来看, 对雷靶信号的判别主要从时域和频域两方面进行。对时域主要是从信号的幅度、周期和持续时间几个方面来进行; 对频域主要是利用快速傅立叶变换(fast fourier transform, FFT)技术对信号做频谱分析[4]。
对雷靶信号的分析处理按以下步骤进行。
1) 当信号幅度超过80dB, 认为接收到有效信号, 开始对信号进行标记。

4) 在目标靶应答的情况下, 在整个信号的时间序列上, 先出现的是鱼雷信号, 然后是目标靶应答信号, 最后是混响。混响有可能和目标靶的应答信号叠加在一起。由于多普勒频率偏移现象, 从不同途径来的混响频率不同, 所以混响中的信号频率要比不包含混响的信号在频率分量上复杂得多, 难以从混响中提取到有用的信息。因此步骤3)的分析到出现混响时应该停止。
5) 重复步骤1)~4), 完成整个雷靶信号的分析判别过程。
受计算速度和精度的限制, 用上面的判别过程对雷靶监测信号进行实时处理, 容易造成漏判或者误判的情况。这可以通过用4 096点的FFT算法重新处理, 可把其中误判的剔除、漏判的补全。
3.2 实例分析
在实际试验中, 实测得到如下4种信号, 按照上面的分析, 处理情况如下。
1) 信号未发生混叠, 如图2。
从信号时域波形可以明显区分雷靶信号。进一步对信号做FFT频谱图, 如图3所示, 可以明显看出, 雷靶信号频谱图中的雷信号和目标靶信号频率相互对应, 此时可判定为雷靶有效应答。
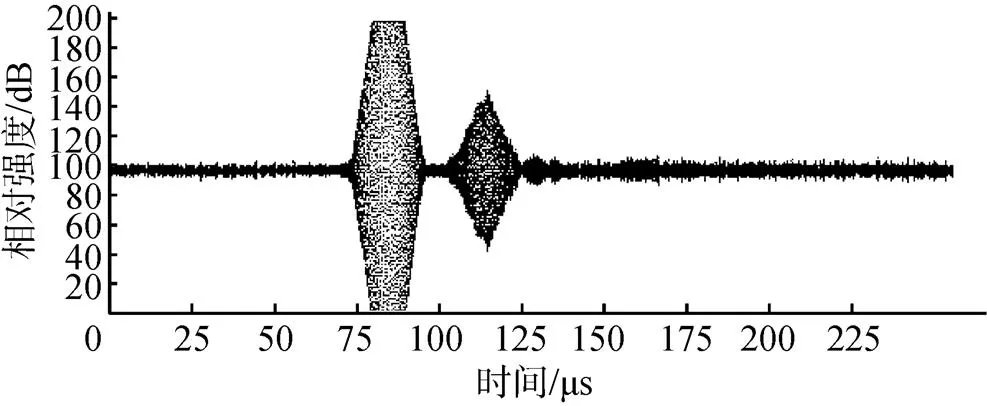
图2 未混叠信号波形示意图

图3 未混叠信号频谱示意图
2) 信号首尾衔接, 见图4。
与第1个信号类似, 从信号时域波形(见图4)和频域波形(见图5), 可以非常明显地判定为有效雷靶应答。
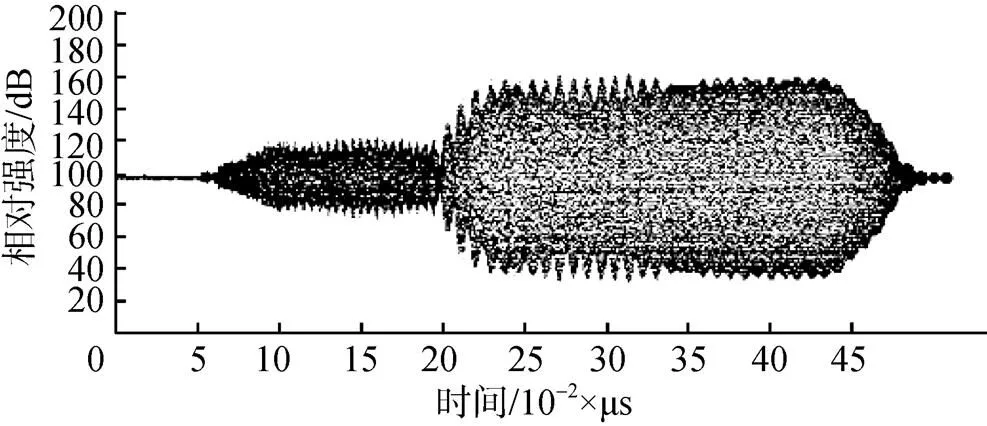
图4 首尾联接波形示意图

图5 首尾联接频谱示意图
3) 信号部分混叠, 见图6。
由于混叠部分出现干涉现象, 信号的频谱图(见图7)已出现其他频率分量, 此时实时处理易出现误判。需事后处理人工进一步识别才能确定为有效雷靶应答信号。

图6 信号混叠波形示意图

图7 信号混叠频谱示意图
4) 信号严重混叠, 见图8。
在混叠严重的情况下, 从信号的时域波形(见图8)和频谱分析图(见图9)已很难区分出雷靶信号。实际应用中, 对该种信号一般不予处理。

图8 混叠严重波形示意图

图9 混叠严重频谱示意图
4 结束语
本文通过对试验过程和试验方案的分析, 提出了一种基于FFT技术的雷靶信号识别方法, 并应用于雷靶信号监测系统。
该系统在新型鱼雷海上试验中发挥了关键性的作用, 具体工程价值体现在: 排除了鱼雷跟踪尾流噪声现象是现场其他噪声所致的假设; 发现并分析验证了浅海混响效应, 对鱼雷声制导性能的影响以及鱼雷跟踪“假目标”问题的原因; 首次检测出鱼雷信号频率的多变性, 即在1个脉冲信号中出现2种甚至3种频率分量, 从而对鱼雷制导战技性能的解释有了新的依据。此外, 本系统提供的大量数据和结果分析为鱼雷生产部门解决问题提供了重要参考, 使一度暂停的试验得以继续进行, 保证了试验结论的客观性和权威性。
今后, 在本文所提供方法的基础上采用频带选择性傅立叶分析(band-selected Fourier analysis, BSFA)等频率细化技术, 将进一步提高该设备的信号分析精度, 对提高该类设备在试验中的作用具有重要的研究价值。
[1] 岳剑平, 张召奎, 朱学文, 等. 水中兵器试验与鉴定[M]. 北京: 国防工业出版社, 2008.
[2] 武征, 孙翱, 任冰明, 等. 海上靶场试验测控技术[M]. 北京: 国防工业出版社, 2007.
[3] 刘大利, 刘云涛, 蔡惠智. 主动声呐舰速补偿的研究[J]. 海洋技术, 2011, 30(3): 59-63. Liu Da-li, Liu Yun-tao, Cai Hui-zhi. Research on Ship Speed Compensation for Active Sonar[J]. Ocean Technology, 2011, 30(3): 59-63.
[4] 应怀樵, 波形和频谱分析与随机数据处理[M]. 北京: 中国铁路出版社, 1983.
[5] 奥本海姆. 离散时间信号处理[M]. 刘树堂, 黄建国, 译. 西安: 西安交通大学出版社, 2001.
[6] Oppenheim V, Schafer R. W. Digital Signal Processing[M]. Englewood Cliffs. New Jersey: Prentice Hall, 1975.
[7] 何振亚. 数字信号处理的理论与应用[M]. 北京: 人民邮电出版社, 1983.
Identification Method of Torpedo-Target Hydroacoustic Signal in Torpedo Sea Trial
SUN Tao, HOU Dai-wen
(91439thUnit, The People′s Liberation Army of China, Dalian 352100, China)
In order to efficiently understand torpedo working condition under water in torpedo trials, a third-party monitoring system is usually used to simultaneously record both signals of torpedo and target for subsequent analysis. In this study, sea trial scenario is analyzed, and a fast Fourier transform-based both signals identification method is proposed by combining time domain with frequency domain for torpedo-target monitoring system. Identification results of the monitoring system in a sea trial verify the validity of the proposed method.
torpedo; sea trial; signal identification; torpedo-target monitoring system; fast Fourier transform
TJ630.6; TB565.2
A
1673-1948(2013)01-0058-04
2012-06-12;
2012-08-03.
孙 涛(1973-), 男, 工程师, 主要研究方向为水声电子工程、水声信号处理及水声装备作战效能及使用.
(责任编辑: 许 妍)
猜你喜欢
小哥白尼(军事科学)(2021年8期)2021-11-22
哈尔滨工程大学学报(2021年10期)2021-11-05
小哥白尼(军事科学)(2020年8期)2020-05-22
科技传播(2019年21期)2019-11-12
军事运筹与系统工程(2019年4期)2019-09-11
舰船电子对抗(2019年2期)2019-05-23
宇航计测技术(2019年1期)2019-03-25
舰船电子工程(2018年11期)2018-11-26
剧作家(2018年2期)2018-09-10
雷达学报(2017年6期)2017-03-26
