
基于一维距离像序列的雷达目标微动参数估计❋
2013-02-27 04:31孙慧霞苏世栋
电讯技术 2013年4期
孙慧霞,邱 峰,苏世栋
(1.运城学院物理与电子工程系,山西运城 044000;2.中航工业第一飞机设计研究院航电所,西安 710089)
基于一维距离像序列的雷达目标微动参数估计❋
孙慧霞1,❋❋,邱 峰2,苏世栋1
(1.运城学院物理与电子工程系,山西运城 044000;2.中航工业第一飞机设计研究院航电所,西安 710089)
雷达目标微动参数估计是微动特征用于目标识别必须首先解决的一个问题。以典型的转动模型为例,分析了微动对一维距离像的影响,推导了不同情况下微动补偿需满足的精度要求,提出了利用自相关法、峰谷值检测法及单脉冲测角原理联合估计微动参数。仿真实验验证了所提算法在信噪比为-5 dB时仍有效。
逆合成孔径雷达;目标特征信息;微动参数估计;一维距离像序列;目标识别
1 引言
现代战争是以高技术信息战、电子战为中心的战争,对战场动态信息的实时监测和处理是关系到战争胜负的重要因素。因此,仅能提供目标位置信息的常规雷达已逐渐不能满足现代战争的需要,人们希望能进一步获取目标的详细信息,雷达自动目标识别技术也就应运而生[1-2]。
雷达目标特征信息是目标识别的依据,特征信息包括非运动特征和运动特征,随着电磁特征控制技术对目标非运动特征控制能力的提升,目标的形状、结构等非运动特征在非合作目标识别中的应用受到限制,而运动特征的可控性较低,因此,对目标运动状态的细节刻画已成为一个新的研究热点。雷达目标的微动特征正是对目标细节的刻画[3]。
自从V.C.Chen将微多普勒的概念引入到微波雷达中以来[4],微动特性在雷达目标探测与识别中受到了广泛的关注。微动即目标或目标组成部分相对雷达的小幅非匀速运动[5],微动产生的微多普勒一方面可以作为目标的独特特性用于识别[6],另一方面会导致ISAR成像质量变差[7-8]。因此,对目标微动特征的提取就显得尤为重要。
特征提取的关键在于所提取的特征能够反映目标的本质特征信息,微动特征信号为非线性非平稳信号,故对其分析和处理的核心问题是时变信号处理。目前,对微动特征提取的研究主要集中在窄带信号的特征提取上,常用的提取微动特征的方法有时频分析方法[4]、独立成分分析方法[9-10]、匹配傅里叶变换方法[11]等。由于宽带信号可以获得更多的目标信息,而步进频率信号是一种重要的宽带信号,可以在获得距离高分辨的同时降低对数字信号处理机瞬时带宽的要求[12],因此,本文将基于步进频率一维距离像序列研究微动特征提取方法,着重研究微动对一维距离像的影响以及针对一维距离像序列的微动特征提取算法。通过对这两个问题的研究给出了避免一维距离像走动和失真需满足的微动参数要求以及详细的微动特征提取算法流程,并对信噪比较低时算法的有效性进行了验证。
2 目标回波信号及其处理
2.1 信号形式
设雷达连续发射M帧步进频率信号,每帧N个脉冲串,则发射信号为[12]

第m帧第n个脉冲的回波为

其中,A为回波幅度,R为目标距离,c为光速。
2.2 目标模型
图1为点目标沿中心O以半径r作旋转运动[13],转动角速度为ω,O点固定,与雷达距离为R0,雷达视线与转动平面的夹角为θ0,初始时刻点目标位于P点,其初始相位为φ0,经时间t后,旋转至P′,则P′与雷达的距离R(t)可以表示为

取采样时刻ts=mNTr+nTr+t0,可得各采样时刻的目标回波时延为

分别表示第m帧的速度和加速度。
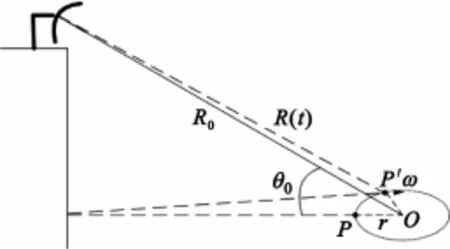
图1 点目标的转动模型Fig.1 The rotationmodel for point target
2.3 微动对一维距离像的影响
将式(4)代入式(2)可得混频后的回波信号为

展开其相位部分,并忽略常数项,得

式中,第一项是用于相参合成的有效相位项,其他各项都是由于目标微动而产生的;第二项是线性相位变化量,是目标微动产生的耦合项;第三项和第四项是二次相位项,将导致合成的一维距离像失真,第五项为目标微动带来的三次非线性项,与第四项的二次项相比较小。
以目标微动引起的距离游动不超过半个高分辨距离单元为准则[14],则:

若脉冲合成的目的不是为了ISAR二维成像或精确测距,而仅为了得到目标的HRRP,则微动补偿精度要求可适当降低。若以目标微动引起的HRRP的移动不超过1/4个不模糊距离窗宽度作为标准[12],则:

目标微动产生的二次相位项导致目标合成距离像波形失真,以在相参处理时间内二次相位项变化不超过π/2为合成像不失真条件[12],则

以合成像的幅度下降在3 dB之内为标准[12],当加速度满足式(10)要求时,其对目标合成距离像的影响可以忽略。

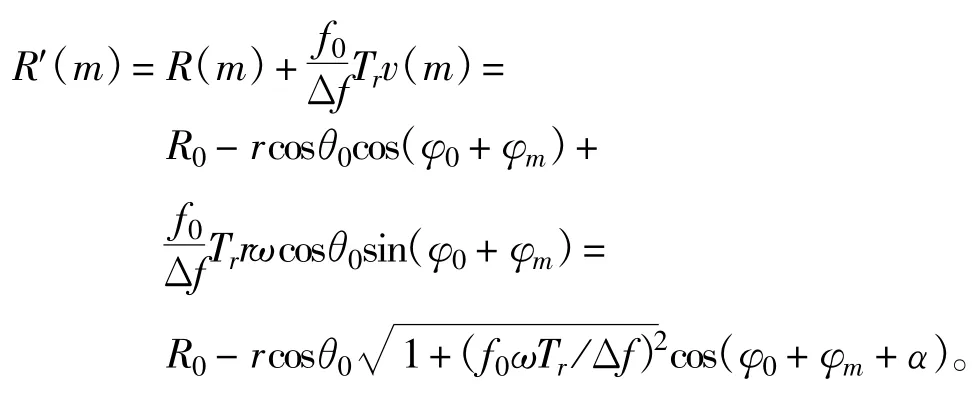
将v(m)=ωr cosθ0sin(φ0+φm)和a(m)=ωr2cosθ0cos(φ0+φm)分别代入式(8)~(10),可得旋转半径与旋转角速度应同时满足以下三式:

3 微动特征提取
在快时间内,若目标旋转半径和旋转角速度满足式(12)和式(13),可以忽略非线性相位项的影响,则IDFT后的结果为
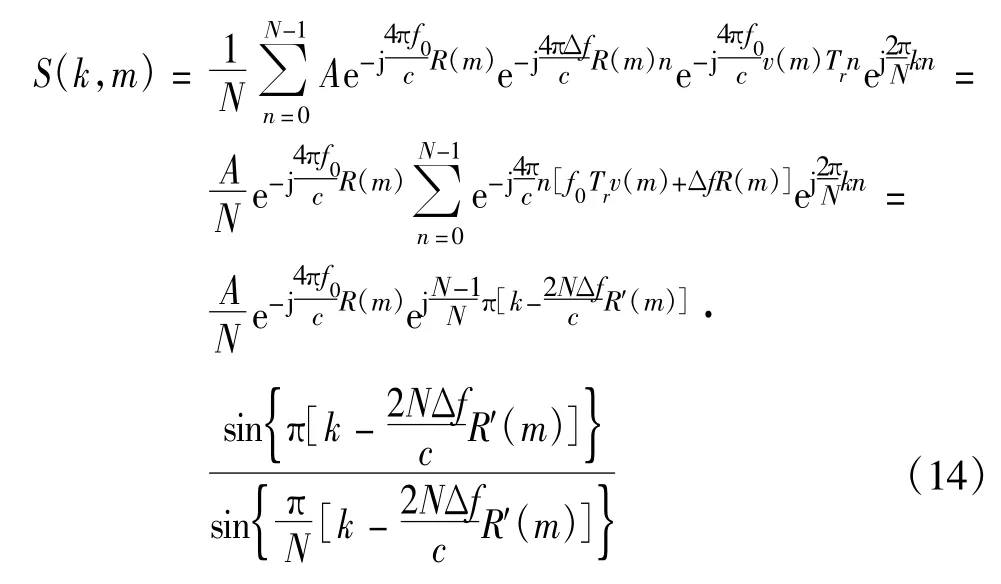
对式(14)取模可得
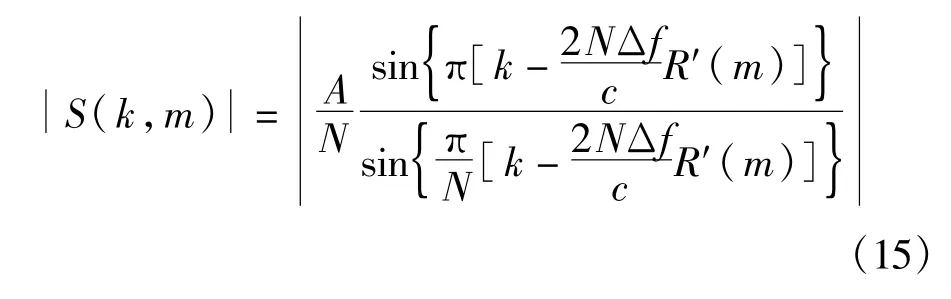
至此,就完成了脉冲合成,目标峰值出现在

因此,

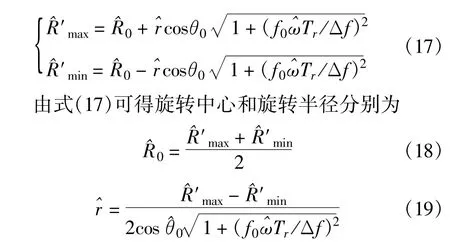
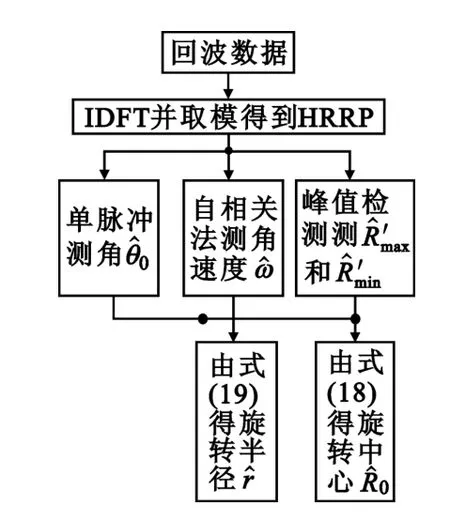
图2 特征提取流程Fig.2 The feature extraction process
4 仿真实验与分析


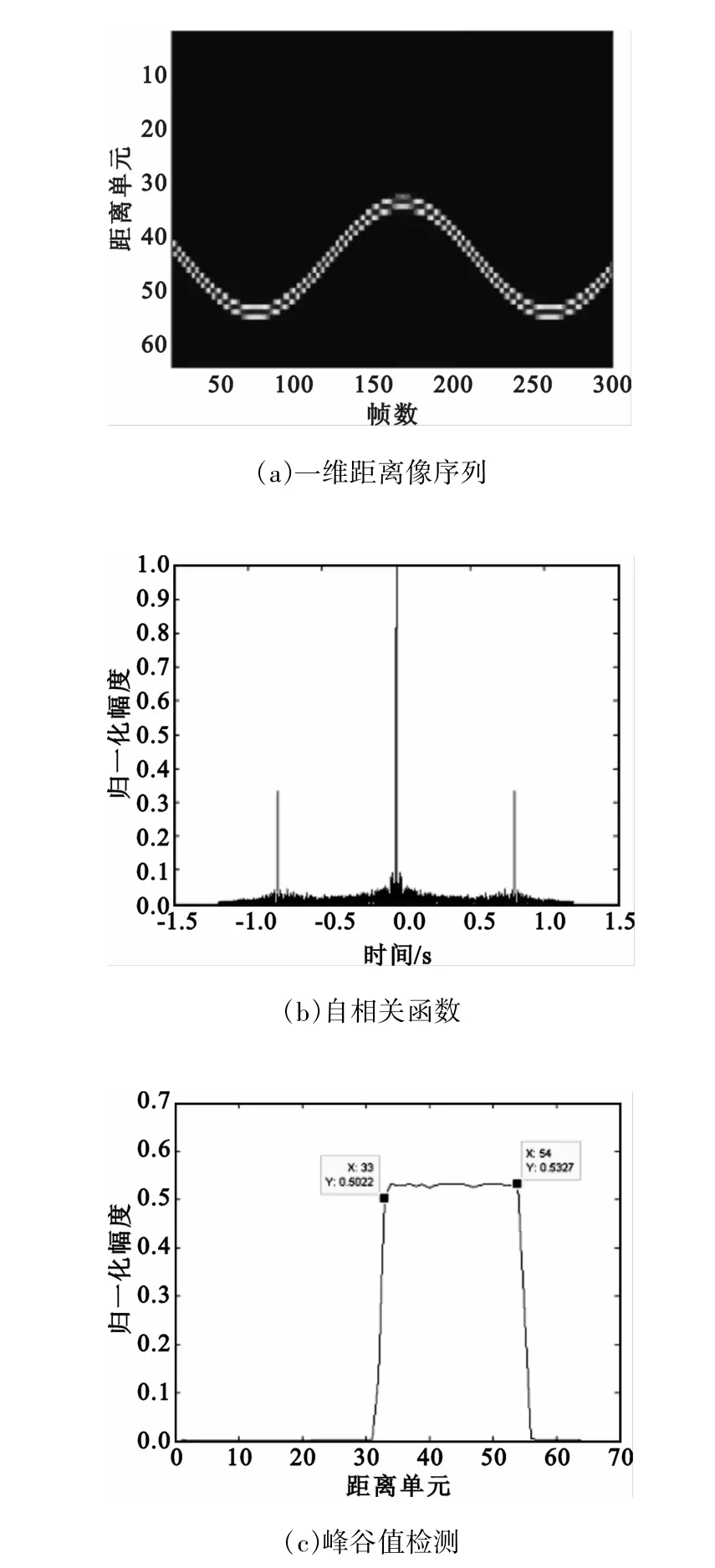
图3 单个旋转散射点微动特征提取Fig.3Micro-motion feature extraction for single rotation scatterer
图4(a)、(b)、(c)分别为具有相同旋转频率和旋转半径、相位相差π/2的4个旋转散射点的一维距离像序列、自相关函数以及峰谷值检测图,其旋转频率和旋转半径与图3中的参数相同。由图4(b)可得估计的旋转周期为0.2 s,故每个旋转散射点的旋转周期^T=0.2×4=0.8 s,从而可得估计的旋转角速度为^ω=2.5πrad/s。同样地,由图4(c)中估计的峰值和谷值距离单元分别为33和54,可得旋转中心与雷达的距离为^R0=100.488 3 m,旋转半径为^r=2.027 9 m。

图4 4个旋转散射点微动特征提取Fig.4 Micro-motion feature extraction for 4 rotation scatterers
做1 000次蒙特卡洛试验得到的结果如图5所示,其中图5(a)为旋转中心与雷达的距离估计误差,图5(b)为旋转半径的估计误差。可以看出,当SNR≥-5 dB时,旋转中心与雷达的距离以及旋转半径的估计较为准确。
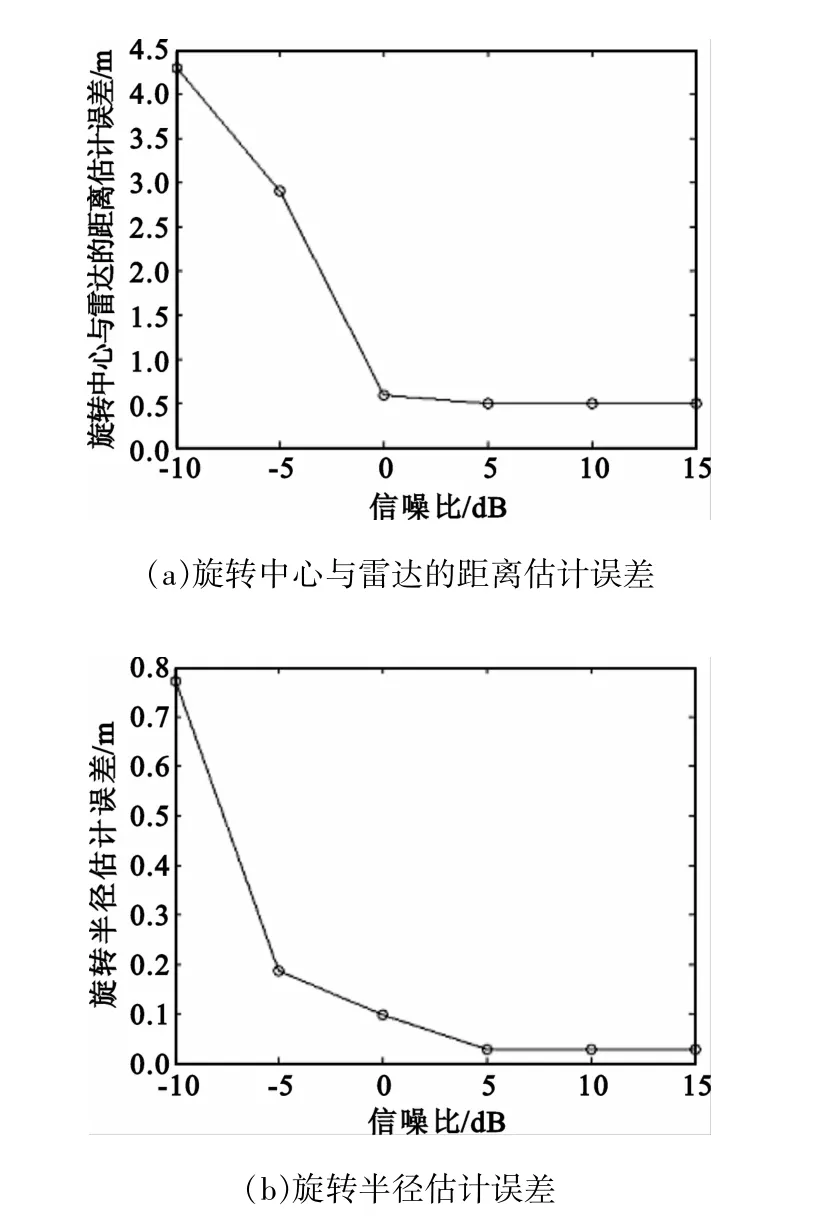
图5 估计误差Fig.5 Estimation error
本文所提方法对噪声不敏感的主要原因在于本文所提算法是基于按时间先后顺序排列的多幅距离像组成的距离像序列,由于各幅距离像中的HRRP位置是随着慢时间以正弦曲线形式变化的,而各幅距离像中的噪声是不相关的,因此,基于距离像序列提取微动参数能有效抑制噪声,并且旋转角速度是通过自相关法测周期得到的,通过自相关处理可以进一步抑制噪声,从而得到较为准确的旋转角速度估计值。由于雷达视线与旋转平面的夹角^θ0和旋转角速度^ω的估计较为准确,因此旋转中心与雷达的距离^R0和旋转半径^r的估计误差主要来自于^R′max和^R′min的估计误差,而^R′max和^R′min是由距离像序列中正弦曲线峰值和谷值对应的最大、最小距离单元数估计得到的,故估计误差与距离像序列中正弦曲线峰值和谷值对应的最大、最小距离单元数的估计误差有关,距离单元的长度决定了量化误差,通过增加IFFT的点数减小距离单元的长度可以减小量化误差,但同时会带来计算量的增加。
5 结束语
本文基于毫米波频率步进体制雷达首先研究了微动对一维距离像的影响,推导了避免一维距离像失真的旋转半径和旋转角速度需满足的条件;其次研究了宽带目标微动特征提取方法,给出了宽带目标微动特征(包括旋转角速度、旋转中心和旋转半径)提取的具体流程,并对微动参数的估计误差进行了分析;最后,利用仿真实验验证了本文所提方法的有效性,并分析了在不同信噪比条件下的微动参数估计性能。
估计微多普勒参数常用的扩展Hough变换[5]由于需要在四维的HT参数空间搜索正弦曲线参数,计算量和存储量都较大,无法实现实时处理,而本文所提方法只需进行一次简单的自相关处理和一维搜索,计算量大大降低。因此,对于单个微动散射点以及具有相同旋转频率和旋转半径的多个微动散射点采用本文方法估计其微动参数简单、有效,对于具有不同旋转频率和旋转半径的多个微动散射点的参数估计将是下一步工作研究的重点。
[1]Smith CR,Goggana PM.Radar target identification[J].IEEEAntennas and Propagation Magazine,1993,35(2):27-38.
[2]刘宏伟,杜兰,袁莉,等.雷达高分辨距离像目标识别研究进展[J].电子与信息学报,2005,27(8):1328-1334. LIU Hong-wei,DU Lan,YUAN Li,et al.Progress in radar automatic target recognition based on high range resolution profile[J].Journalof Electronics&Information Technology,2005,27(8):1328-1334.(in Chinese)
[3]陈行勇.微动目标雷达特征提取技术研究[D].长沙:国防科技大学,2006. CHEN Hang-yong.Research on radar signature extraction from targetwithmicro-motions[D].Changsha:National University of Defense Technology,2006.(in Chinese)
[4]Chen V C.Analysis of Radar Micro-Doppler Signature with Time-Frequency Transform[J].Proc Statistical Signal and Array Processing,2000,14(16):463-466.
[5]Chen V C.Doppler signatures of radar backscattering from objectswith micro-motions[J].IET Signal Process,2008,2(3):291-300.
[6]Sun H X,Liu Z.Nutation feature extraction of ballistic missile warhead[J].Electronics Letters,2011,47(13):770-772.
[7]罗迎,张群,封同安,等.强杂波下含旋转部件的目标成像及微多普勒提取[J].系统工程与电子技术,2009,31(2):261-264. LUO Ying,ZHANG Qun,FENG Tong-an,et al.Imaging andmicro-Doppler extraction of targets with rotating parts in strong ground clutter[J].Systems Engineering and Electronics,2009,31(2):261-264.(in Chinese)
[8]Luo Y,Zhang Q,Qiu CW.Micro-Doppler effect analysis and feature extraction in ISAR imagingwith Stepped-frequency chirp signals[J].IEEE Transactions on Geoscience and Remote Sensing,2010,48(4):2087-2098.
[9]Chen V C.Spatial and Temporal Independent Component Analysis of Micro-Doppler Features[C]//Proceedings of 2005 IEEE International Conference on Radar.Virginia,USA:IEEE,2005:348-353.
[10]白雪茹,周峰,刑孟道,等.空中微动旋转目标的二维ISAR成像算法[J].电子学报,2009,37(9):1937-1943. BAIXue-ru,ZHOU Feng,XINGMeng-dao,et al.2D ISAR imaging algorithm for airmicro-motion targets[J].Acta Electronica Sinica,2009,37(9):1937-1943.(in Chinese)
[11]Setlur P,Amin M,Thayaparan T.Micro-Doppler signal estimation for vibration and rotation targets[C]//Proceedings of the 8th International Symposium on Signal Processing and its Applications.Sydney:IEEE,2005:639-642.
[12]刘峥.脉冲合成高分辨雷达目标运动补偿与成像[D].西安:西安电子科技大学,2000. LIU Zheng.Synthetic High-Range-Resolution Radar Imaging and Motion Compensation[D].Xi′an:Xidian University,2000.(in Chinese)
[13]He SS,Zhu Y F,Zhao H Z.Analysis of Rotating Structures for Stepped Frequency Radar[C]//Proceedings of 2008 International Conference on Radar.Adelaide,SA:IEEE,2008:386-390.
[14]涂轶凡.一种新型的超宽带细步进频率源设计[J].电讯技术,2009,49(5):71-73. TU Yi-fan.Design of a Novel UWB Small Step Frequency Synthesizer[J].Telecommunication Engineering,2009,49(5):71-73.(in Chinese)
[15]李金梁,王雪松,刘阳,等.雷达目标旋转部件的微Dopper效应[J].电子与信息学报,2009,31(3):583-587. LIJin-liang,WANG Xue-song,LIU Yang,et al.Micro-Doppler Effect of Rotation Structure on Rdar Targets[J]. Journal of electronics and information technology,2009,31(3):583-587.(in Chinese)
[16]毛二可,龙腾,韩月秋.频率步进雷达数字信号处理[J].航空学报,2001,22(增刊):16-25. MAO Er-ke,LONG Teng,HAN Yue-qiu.Digital signal processing of stepped frequency radar[J].Chinese Journal of Aeronautics,2001,22(Suppl.):16-25.(in Chinese)

孙慧霞(1983—),女,山西运城人,2011年于西安电子科技大学雷达信号处理国防科技重点实验室获博士学位,现为讲师,主要研究方向为雷达目标识别;
SUN Hui-xia was born in Yuncheng,Shanxi Province,in 1983.She received the Ph.D.degree from National Key Lab of Radar Signal Processing, Xidian University,in 2011.Her research concerns radar target recognition.
Email:hxsun@mail.xidian.edu.cn
邱峰(1982—),男,陕西西安人,2008年于西安电子科技大学雷达信号处理国防科技重点实验室获硕士学位,现为工程师,主要研究方向为雷达信号与信息处理;
QIU Feng was born in Xi′an,Shaanxi Province,in 1982.He received the M.S.degree from National Key Lab of Radar Signal Processing,Xidian University,in 2008.He is now an engineer.His research concerns radar signal and information processing.
苏世栋(1962-),男,山西运城人,2009年于中央电大获学士学位,现为副教授,主要研究方向为电子科学与技术、仪器仪表及计算机应用。
SU Shi-dong was born in Yuncheng,Shanxi Province,in 1962.He received the B.S.degree from China Central Radio and TV University in 2009.He is now an associate professor.His research concerns electronic science and technology,instrument and computer application.
M icro-M otion Parameter Estimation of Radar Target Based on High Range Resolution Profile Sequences
SUN Hui-xia1,QIU Feng2,SU Shi-dong1
(1.Department of Physics and Electronics Engineering,Yuncheng University,Yuncheng 044000,China;2.The First Aircraft Institute of AVIC,Xi′an 710089,China)
Micro-motion parameter estimation of radar target should be studied before its application in target recognition.The effect ofmicro-motion for high range resolution profile is analyzed based on typical rotationmodel,while the precision requested formicro-motion compensation is derived.Autocorrelation,peak-to-valley value detection combined with monopulse angle estimation are proposed to estimatemicro-motion parameters.Computer simulation is given to prove the effectiveness of themethods in the condition of signal-to-noise ratio at-5 dB. Key words:ISAR;target feature information;micro-motion parameter estimation;high range resolution profile sequences;target recognition
TN957.5
A
1001-893X(2013)04-0389-06
10.3969/j.issn.1001-893x.2013.04.004
2012-11-27;
2013-03-25 Received date:2012-11-27;Revised date:2013-03-25
运城学院院级项目(YQ-2011034)
Foundation Item:School Project of Yuncheng University(YQ-2011034)
❋❋通讯作者:hxsun@mail.xidian.edu.cn Corresponding author:hxsun@mail.xidian.edu.cn
猜你喜欢
电子制作(2019年15期)2019-08-27
雷达学报(2018年5期)2018-12-05
电子制作(2018年19期)2018-11-14
宇航计测技术(2018年3期)2018-09-08
中学生数理化·高一版(2017年3期)2017-07-08
自动化学报(2017年11期)2017-04-04
火控雷达技术(2016年1期)2016-02-06
柴油机设计与制造(2015年3期)2015-12-05
中国铁道科学(2015年4期)2015-06-21
噪声与振动控制(2015年4期)2015-01-01
