
一种新的分块恒虚警率检测技术❋
2013-02-27 04:31孙红亮吕泽均
电讯技术 2013年4期
孙红亮,吕泽均,张 涛
(四川大学计算机学院国家空管自动化系统技术重点实验室,成都 610065)
一种新的分块恒虚警率检测技术❋
孙红亮,吕泽均❋❋,张 涛
(四川大学计算机学院国家空管自动化系统技术重点实验室,成都 610065)
经典的参量型恒虚警率检测器只在特定的背景环境下才能得到较高的检测性能,而低空监视雷达的工作环境较为复杂,需要一种对杂波环境具有较强稳定性的检测器。为此,对传统的检测技术进行了改进,提出了一种新的分块恒虚警率检测技术。该技术通过对参考单元进行适当分块来提高对不同环境的适应能力,弥补了传统恒虚警率检测技术需要杂波背景分布的不足,增强了检测算法的通用性。给出了该算法在均匀杂波环境和杂波边缘环境下的虚警概率理论公式。计算机仿真验证了该技术的可行性和有效性。
低空监视雷达;目标检测;单元平均;有序统计;恒虚警率
1 引言
雷达目标检测在早期是依赖雷达操纵员通过人眼观测雷达显示器上的目标信号来完成的,这种方法比较主观,不能保证判断的准确性。随着自动检测技术的不断发展,其已经应用到雷达目标检测当中。而在自动检测过程中,恒虚警率(Constant False Alarm Rate,CFAR)处理扮演着重要的角色。经典的恒虚警处理方法分为两类:均值(Mean Level)类和有序统计(Ordered Statistics)类。前者以单元平均(Cell Averaging,CA)-CFAR[1]为代表,后者以有序统计(Ordered Statistics,OS)-CFAR[2]为代表。在均匀杂波环境中,CA-CFAR具有非常好的检测性能,但是在杂波边缘环境当中,其虚警控制能力急剧下降。针对这个问题之后出现了GO(Greatest of)-CFAR[3]。在多目标环境中,CA-CFAR的检测性能严重下降,会出现“目标遮蔽”现象。为了解决这个问题,Trunk G V提出了SO(Smallest of)-CFAR[4]。尽管针对CACFAR在杂波边缘和多目标环境中的缺点提出了相应的解决方案,但是这两种方法不能同时凑效。Hezarkhani提出的LocalMinimum Selected Cell Averaging CFAR[5](LMSCA-CFAR)也是CA-CFAR的改进算法。有序统计类CFAR主要包括OS、CMLD、TM、OSGO、OSSO-CFAR。有序统计类CFAR在多目标环境中的检测性能比CA有所提高,但是在均匀环境下其没有CA-CFAR检测性能好。以上提出的各种CFAR检测器有个共同的缺点,就是每个CFAR检测器都是在特定的环境下具有比较高的检测性能,然而当变换到其他环境下存在各自不同的问题。因此对这两类检测器进行结合成为了很多研究人员研究的方向,大致可以分为3种基本模型:OS-OS、OSCA、TM-TM。Smith提出了Variability Index CFAR[6](VI-CFAR),之后出现了一些对VI-CFAR的改进算法,如VIMTM-CFAR[7]和OSVI-CFAR[8]。Cao提出Switching CFAR[9](S-CFAR),SOS-CFAR[10]是对其的改进。这些检测器虽然可以适合不同的环境,但是需要首先判断背景情况再选择合适的检测方法。低空空域是我国现代空管和空防较为薄弱的空域,随着我国低空空域的逐步开放,由于低空空域环境的特殊性和复杂性,必须寻求有效的低空监视雷达目标检测新技术。
针对上述问题,本文提出了分块恒虚警率(Divided Block CFAR,DB-CFAR)检测器。该检测器是同时基于CA-CFAR和OS-CFAR的。CA-CFAR和OSCFAR是DB-CFAR的特殊情况。DB-CFAR把R个参考单元分成m块,当m取较大值时,其性质接近CA-CFAR;当m取较小值时,其性质接近OS-CFAR。因此,可以取适当的m值使得DB-CFAR在均匀杂波环境中有较高的检测性能,在多目标环境中具有较强的抗干扰能力。值得一提的是,DB-CFAR的样本处理时间只是OS-CFAR的1/m。
2 DB-CFAR基本模型
CA-CFAR和OS-CFAR检测器的模型在文献[11]里已经讲述,这里就不再重述,下面只对DBCFAR模型进行详细的介绍。
DB-CFAR检测器的结构如图1所示,其中D是检测单元,xi(i=1,2,…,n)、yj(i=1,2,…,n)是参考单元样本,R是参考单元总数,n=R/2,m是分组数,L是每组的单元数,T是标称化因子,S是阈值。DB-CFAR把参考单元分成m组(为方便分析我们取m为偶数),首先对每组中的参考单元样本按从小到大的顺序进行排序,取每组中的第k个排序样本xi(k)(i=1,2,…,m/2)和yj(k)(j=1,2,…,m/2),然后对这m个样本进行求和作为杂波功率水平的估计Z。
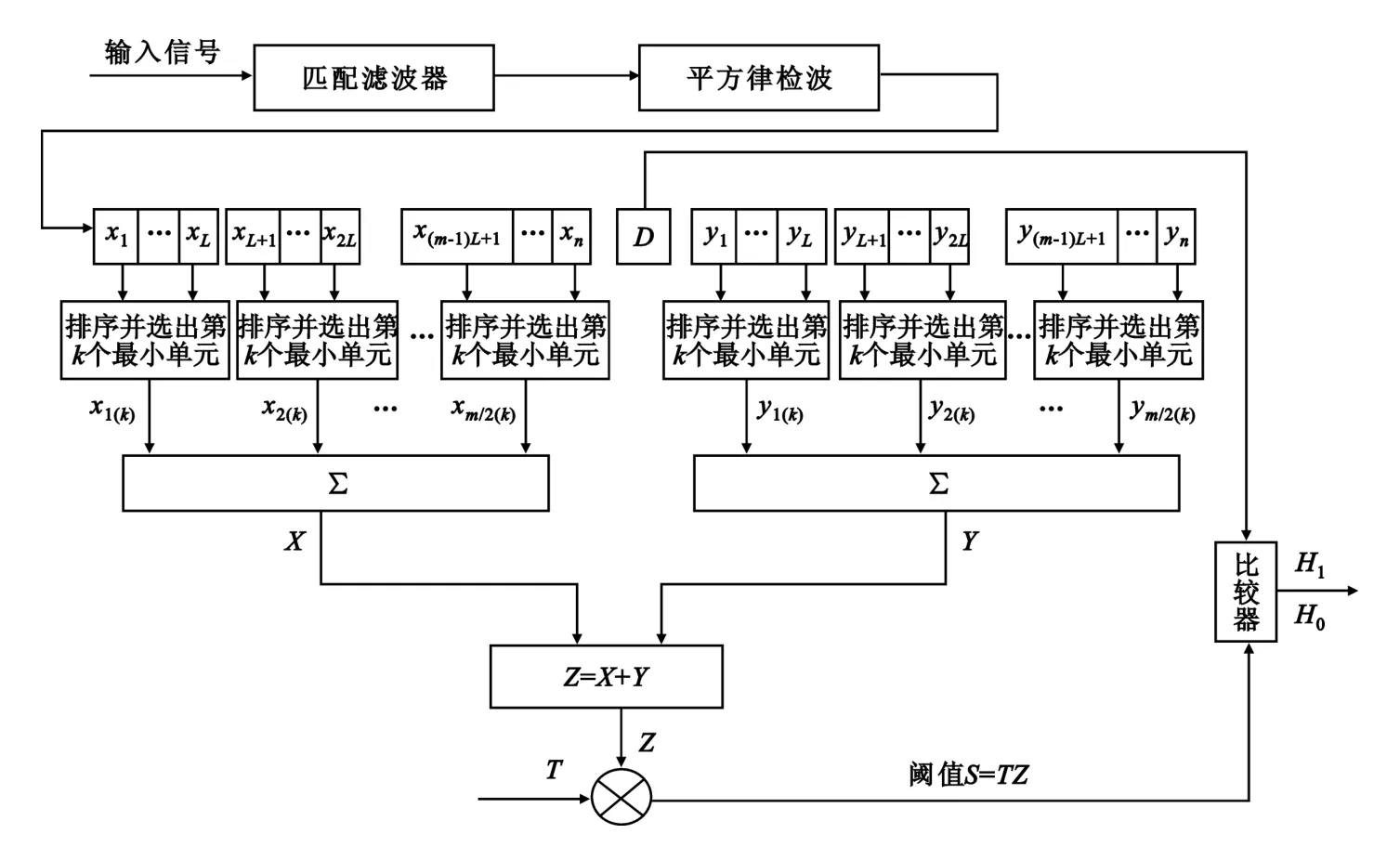
图1 DB-CFAR检测器方框图Fig.1 Block diagram of DB-CFAR detetor
假设接收机噪声和背景噪声服从高斯分布,其包络为瑞利分布,经过平方律检波器后,每个参考单元采样xi(i=1,2,…,n)和yj(i=1,2,…,n)服从指数分布,其概率密度函数(PDF)和累计分布函数(CDF)分别为
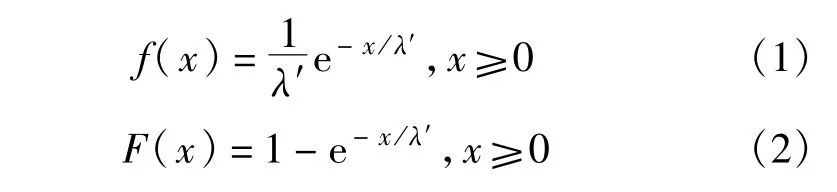
其中:

式中,λ′表示背景中杂波和噪声总的功率水平,λ是信噪比。H0表示假设参考单元不存在目标,H1表示假设参考单元存在目标。
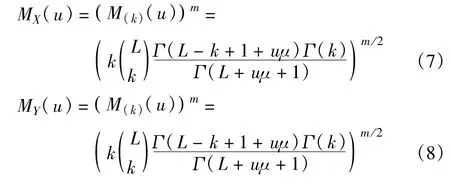
根据次序统计量的性质,xi(k)(i=1,2,…,m/2)和yj(k)(j=1,2,…,m/2)的概率密度函数[11]为
矩母函数(MGF)[11]为

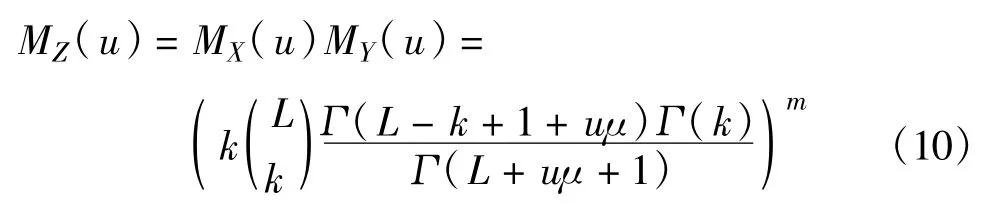
由卷积定理知Z的概率密度函数为

根据矩母函数的性质知,其Z的矩母函数为
传统的OS-CFAR对样本的处理时间为T1,而DB-CFAR对样本的处理时间我们可以推出为T2,近似为OS-CFAR的1/m。

3 DB-CFAR性能分析
3.1 均匀杂波背景
在均匀杂波背景中,参考单元采样xi(i=1,2,…,n)和yj(i=1,2,…,n)独立同分布(IID)于指数函数,其参数λ′=μ。根据虚警概率的定义可知DB-CFAR的虚警概率为
将上式的μ换成μ(1+λ),则得到DB-CFAR的检测概率表达式

将式(11)和(12)代入式(10)可得到DB-CFAR的检测概率和虚警概率分别为

虚警概率是标称化因子T的函数,可以利用恒定的虚警概率Pfa来求得T。
Rohling在文献[2]里定义了平均判决阈值(Average Detection Threshold,ADT),ADT不依赖检测概率,其值越小表示该CFAR的检测性能越好,检测概率越高。对于求DB-CFAR的ADT,可利用矩母函数和均值的关系得到:
当m=1时DB-CFAR就退化为OS-CFAR,当m=2时就退化为GOSCA-CFAR[12],当m=R时退化为CA-CFAR,所以不考虑这几种情况。表1列出了R=32、m取4和8时其DB-CFAR检测器的标称化因子T和平均判决阈值ADT的值,在此假设Pfa=10-6。由表1可以看出,m和k越大其ADT就越小,即检测性能就越好。其中当m=4时,k取7的ADT比k取8时小,这正好符合文献[2]对于OS中k的取值的结论。

表1 R=32、Pfa=10-6时DB-CFAR检测器T和ADT的值Table 1 T and ADT of DB-CFAR for R=32,Pfa=10-6
下面通过仿真来比较DB-CFAR和CA-CFAR、OS-CFAR在均匀杂波背景下的检测性能,仿真结果如图2所示,其蒙特卡洛次数为100 000次。

图2 DB-CFAR在均匀杂波环境中的检测性能Fig.2 Detection performance of DB-CFAR in homogeneous background
图2中,DB(8,4)表示DB-CFAR检测器取m=8、k=4、DB(4,7)表示m=4、k=7,DB(4,8)表示m=4、k=8。OS(24)表示在OS-CFAR检测器中取第24个最小值作为杂波功率的估计值(由文献[2]知在OS-CFAR中k的值应选取为R的3/4)。从图中可以明显看出,DB-CFAR的检测性能明显高于OSCFAR,而且当m取值越大时其检测性能越靠近CACFAR。这说明在均匀杂波背景中应该m的值取得越大,其DB-CFAR的检测性能越好。
3.2 杂波边缘背景
在非均匀杂波环境中,DB-CFAR参考单元样本不再服从独立同分布(IID),在杂波边缘环境中杂波功率水平由一种水平急剧变化到另一种水平。不失一般性,我们只考虑从低杂波功率水平到高杂波功率水平的情况。假设两杂波功率之比为γ,R(R=2n,n为前沿、后沿滑窗的长度)个参考单元中有NC个单元服从分布:

剩下R-NC个单元服从分布:

当0≤NC≤n时,即杂波边缘在前沿滑窗时,假设第Km个块中包含杂波边缘,第Km块中有Nm个单元服从分布f1(x),其余L-Nm个单元服从分布f2(x)。根据文献[11]知,xKm(k)的CDF为
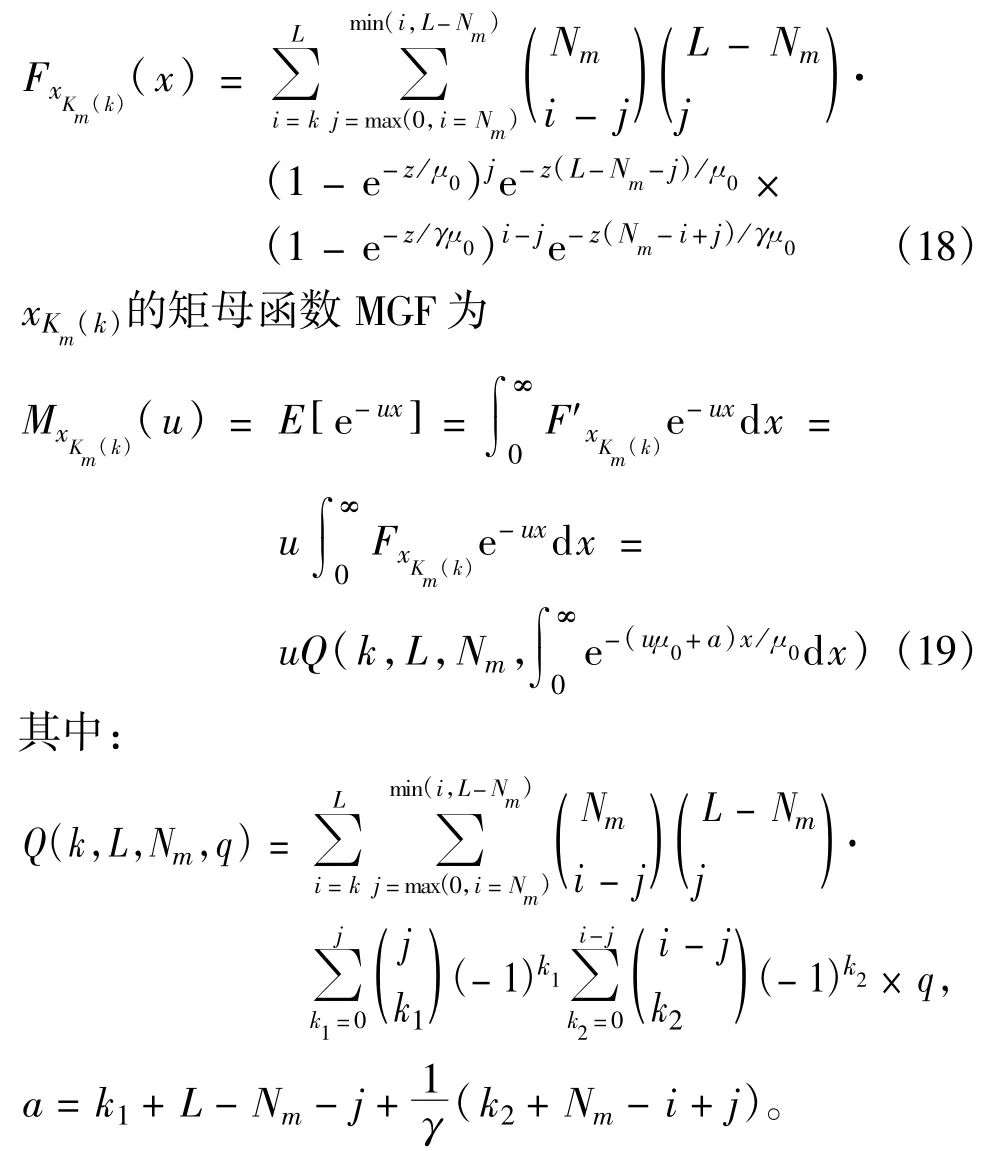
由于除了第Km块分块,其他的分块都在均匀杂波环境当中,因此x1(k),x2(k),…,xKm-1(k)的矩母函数为

由矩母函数的性质:独立随机变量和的矩母函数等于各个随机变量矩母函数的乘积,可得Z的矩母函数为


将式(20)代入式(11)可得Z的虚警概率为

同理可得,当n≤NC≤R时Z的虚警概率为
3.3 多目标背景
OS-CFAR在多目标环境中的检测性能之所以高于CA-CFAR,是因为干扰目标的功率明显高于杂波的,参考单元样本排序之后OS-CFAR把干扰目标放在最大值的位置,取第k个最小值作为杂波功率水平的估计,从而把干扰目标给屏蔽掉。同样的道理,DB-CFAR首先取分块后每块第k个最小值,然后对这m个参考单元进行平均作为杂波功率水平的估计,同样可以屏蔽一定数目的干扰目标。但是当k取最大值L时,DB-CFAR就不能屏蔽任何干扰目标。考虑R=32的情况,m取4时k就不能取8,m取8时k就不能取4,再由表1可以看出,在均匀杂波环境下m=4、k=7时DB-CFAR的ADT比m=8、k=3时小,因此,取m=4、k=7。图3给出在多目标环境中DB-CFAR的检测性能和CA-CFAR、OSCFAR的比较,其中OS(24,1)、OS(24,3)分别表示OS(24)在有1和3个干扰目标数的环境中的检测概率,CA(1)、CA(3)分别表示CA-CFAR在有1和3个干扰目标数的环境中的检测概率,而DB(4,7,1)、DB(4,7,3)分别表示DB(4,7)在有1和3个干扰目标数的环境中的检测概率。

图3 DB-CFAR在多目标环境中的检测性能Fig.3 Detection performance of DB-CFAR processors withmultiple interfering targets
从图3中不难看出,当一块参考滑窗中的干扰目标数IN<L-k时,DB-CFAR和OS-CFAR的检测性能相近,明显强于没有抗干扰能力的CA-CFAR;当一块参考滑窗中的干扰目标数IN>L-k时,DBCFAR检测性能明显下降。可以推算出,DB-CFAR最多可以抗m(L-k)个干扰目标,不过这必须保证在每块参考滑窗中的干扰数目小于L-k。
4 结论
本文提出了一种基于OS-CFAR和CA-CFAR的新的恒虚警率检测器DB-CFAR,推导出了该算法在均匀杂波和杂波边缘环境中的虚警概率的解析表达式,同时对其在均匀杂波和多目标环境中进行了仿真。仿真结果表明:该检测器兼具均值类和有序类CFAR检测器的优点,CA-CFAR和OS-CFAR是DBCFAR的特殊情况。在均匀杂波环境中,DB-CFAR可以近似达到CA-CFAR的检测性能;在多目标环境中,DB-CFAR具有较强的抗干扰能力,且其检测性能略高于OS-CFAR。DB-CFAR把参考滑窗R分成的块数不同其检测性能在不同环境中也不尽相同,特别地,当m=1时其退化为OS-CFAR,当m=R时退化为CA-CFAR,选择适当的m可以使DB-CFAR同时应用于均匀杂波、杂波边缘和多目标环境。因此,DB-CFAR扩展了经典恒虚警率检测器的应用环境和适应能力,能适应更苛刻的环境,总体检测效果得到改善。在低空空域开放后,低空监视雷达由于其监视区域内的目标多、环境复杂,传统的目标检测技术的性能会受到较大的影响,本文提出的方法在雷达工程应用方面具有一定的实用性和优越性。
[1]Finn H M,Johnson R S.Adaptive detection mode withthreshold controlas a function ofspatially sampled clutter-level estimates[J].RCA Review,1968,29(9):414-464.
[2]Rohling H.Radar CFAR thresholding in clutter and multiple target situations[J].IEEE Transactions on Aerospace and Electronic Systems,1983,19(4):608-621.
[3]Hansen V G.Constant false alarm rate processing in search radars[C]//Proceedings of 1973 IEEE International Radar Conference.London:IEEE,1973:352-332.
[4]Trunk GV.Range resolution of targetsusing automatic detectors[J].IEEE Transactions on Aerospace and Electronic Systems,1978,14(5):750-755.
[5]Hezarkhani A,Kashaninia A.Performance Analysis of a CACFAR detector in the interfering target and homogeneous background[C]//Proceedings of 2011 IEEE International Conference on Electronics,Communications and Control. Ningbo:IEEE,2011:1568-1572.
[6]Smith M E,Varshney PK.Intelligent CFAR processor based on data variability[J].IEEE Transactions on Aerospace and Electronic Systems,2000,36(3):837-847.
[7]徐从安,简涛,何友,等.一种改进的VI-CFAR检测器[J].信号处理,2011,27(6):926-931. XU Cong-an,JIAN Tao,HE You,et al.An Improved VICFAR Detector[J].Signal Processing,2011,27(6):926-931.(in Chinese)
[8]Zhang Renli,Zou Yiwei,Sheng Weixing,et al.An Improved CFAR Detector for Non-homogeneous Clutter Environment[C]//Proceedings of 2010 International Symposium on Signals,Systems and Electronics.Nanjing:IEEE,2010:1-4.
[9]Cao T V.Constant false alarm rate algorithm based on test cell information[J].IETRadar Sonar Navigation,2008,2(3):200-213.
[10]李志淮,谭贤四,王红,等.S-CFAR的改进型SOSCFAR[J].雷达科学与技术,2009,7(2):135-138. LIZhi-huai,TAN Xian-si,WANG Hong,etal.SOS-CFAR A Modification of S-CFAR[J].Radar Science and Technology,2009,7(2):135-138.(in Chinese)
[11]何友,关键,孟祥伟.雷达目标检测与恒虚警处理[M].北京:清华大学出版社,2011. HE You,GUAN Jian,MENGXiang-wei.Radar TargetDetection and CFAR Processing[M].Beijing:Tsinghua University Press,2011.(in Chinese)
[12]何友,Rohling H.两种具有自动筛选技术的广义有序统计恒虚警检测器及其在多目标情况下的性能[J].电子科学学刊,1994,16(6):582-590. HE You,Rohling H.Performance of two generalized order statistics CFAR detectorswith automatic censoring technique in multiple target situations[J].Journal of Electronics,1994,16(6):582-590.(in Chinese)

孙红亮(1987—),男,河南安阳人,2011年于南阳理工学院获数学与应用数学专业学士学位,现为硕士研究生,主要从事信号与信息处理和雷达数据处理等方面的研究工作;
SUN Hong-liang was born in Anyang,Henan Province,in 1987.He received the B.S.degree from Nanyang Institute of Technology in 2011.He is now a graduate student.His research concerns signal and information processing,radar data processing.
Email:sunxing1130@163.com
吕泽均(1966—),男,四川富顺人,博士,高级工程师、副教授,主要研究方向为阵列信号处理、信息融合、雷达组网和电子侦察等;
LV Ze-jun was born in Fushun,Sichuan Province,in 1966.He is now a senior engineerwith the Ph.D.degree and also an associate professor.His research concerns array signal processing,information fusion,radar networking and electronic reconnaissance,etc.
Email:lvzj186@163.com
张涛(1988—),男,四川大邑人,2010年于西南科技大学获材料科学与工程专业学士学位,现为硕士研究生,主要从事空中交通流量管理与智能算法的研究工作。
ZHANGTao was born in Dayi,Sichuan Province,in 1988.He received the B.S.degree from Southwest University of Science and Technology in 2010.He is now a graduate student.His research concerns air traffic flowmanagement and intelligent algorithms.
Email:zfoolt@qq.com
A Novel Divided Block CFAR Detection Technique
SUN Hong-liang,LV Ze-jun,ZHANG Tao
(National Key Laboratory of Air Traffic Control Automation System Technology,College of Computer,Sichuan University,Chengdu 610065,China)
Only in the specific background environment can the classic parametric constant false alarm rate(CFAR)get higher detection performance,but low-altitude surveillance radar isworking inmore complex environment and it needs amore stable detector for clutter environment.For this reason,the traditional detection techniques are improved,moreover a new CFAR detection technique,designated as divided block CFAR(DBCFAR),is proposed.The technique improves its adaptability for differentenvironmentby dividing appropriately the reference window tomake up for that the traditional CFAR detection technique needs the distribution of clutter background and enhance the universality of the detection algorithm.Its theoretical formula of false alarm rate in homogeneous background and clutter edge environment is derived.The resultof computer simulation confirms the technique′s feasibility and effectiveness.
low-altitude surveillance radar;target detection;cell averaging;ordered statistics;CFAR
TN957.5
A
1001-893X(2013)04-0429-06
10.3969/j.issn.1001-893x.2013.04.011
2012-11-01;
2013-02-01 Received date:2012-11-01;Revised date:2013-02-01
国家高技术研究发展计划(863计划)项目(2012AA011804)
Foundation Item:The National High Technology Research and Development Program(863 Program)of China(2012AA011804)
❋❋通讯作者:lvzj186@163.com Corresponding author:lvzj186@163.com
猜你喜欢
兵工学报(2022年11期)2022-12-01
科学与信息化(2021年30期)2021-12-24
物联网技术(2019年9期)2019-11-06
火力与指挥控制(2018年10期)2018-11-13
科学与财富(2017年24期)2017-09-06
科技视界(2017年10期)2017-08-21
中国交通信息化(2017年9期)2017-06-06
电子制作(2017年10期)2017-04-18
工业设计(2016年11期)2016-04-16
西北工业大学学报(2015年3期)2015-12-14
