SMA丝驱动的仿生尾鳍推进器的实验研究
2013-02-22 08:22郭艳玲王振龙袁斯洋
微特电机 2013年7期
李 健,郭艳玲,王振龙,袁斯洋
(1.东北林业大学,黑龙江哈尔滨150040;2.哈尔滨工业大学,黑龙江哈尔滨150001)
0 引 言
随着对仿生水下机器人的研究深入,对水下生物运动机理的研究也越来越重视,科学家正积极研制高效的仿生水下机器人[1]。通过实验方法直接探究水下生物的游动机理无疑最为有效,可以得到准确的第一手资料,然而存在着随机性强、成本高等弊端。因此搭建一些模仿水下生物推进方式的模型,以其为研究对象并进行实验研究,成为研究生物游动机理的另一种选择。这种研究方式可控性好,能够获得全面的数据,但其仿生水平的高低对研究结果的影响较大。
鱼类是最常见的水中生物,尾鳍的往复摆动是其最主要的推进方式。在国内外对仿生鱼的研究中,尾鳍摆动式机器鱼也占据着最重要的地位。如麻省理工研制的世界上第一条机器鱼“Robot-Tuna”[2]、北航研制的 SPC 系列机器鱼[3]、哈工程研制的“仿生-I号”机器鱼[4],都是模仿鱼尾的动作,然而这些机器鱼大都由电机带动连杆实现,其动作特征和真实鱼类相比差距较大,推进性能也较低。近来,各种智能材料相继应用到仿生鱼的研究上,如纽约大学Poly理工学院研制的基于电流驱动聚合物(Ion-Exchange Polymer Metal Composite,IPMC)的微小型仿生机器鱼[5]、澳大利亚的卧龙岗大学研制的由导电聚吡咯(英文名polypyrrole)驱动的仿生鱼[6]、哈工程研制了 IPMC 驱动的微型机器鱼[7]、哈工大王振龙研制了形状记忆合金丝(Shape memory alloy,SMA)驱动的微型机器鱼[8],这些智能材料驱动的仿生鱼柔性好,仿生化水准和推进性能高。
在对仿生尾鳍的实验研究方面,美国特拉华大学对仿箱鱼尾鳍进行了实验[9],找到了尾鳍形状、刚性及频率的最优参数。中国科学技术大学建立了对称和非对称仿生尾鳍“C”型起动的模型[10],用PIV研究了其后的漩涡结构特征。然而这些仿生模型柔性化程度不高,实验结果也仅具备一定参考价值。针对上述研究存在的问题,本文在研制高度仿生化的嵌入式形状记忆合金丝驱动的仿生尾鳍推进器的基础上,通过实验方式对其推进性能、流场特性进行研究。
1仿生尾鳍推进器的研制
1.1 鱼类尾鳍的生物学基础
鱼类主要靠鳍实现水中的自由游动,而在各种鳍中尾鳍的作用是最大的,对于硬骨鱼来说,尾鳍承担着90%的推力,同时尾鳍还起着保持身体稳定,把握运动方向的作用。运动中尾鳍呈现出高度的柔性,能实现大幅度的变形,正得益于它的精妙结构。图1中对硬骨鱼尾鳍的透视图可以发现,整个尾鳍是由一系列并行排列的鳍条来支撑的,鳍条的配置方向为从鳍的根部到端部方向,相邻的鳍条通过柔软的胶原鳍膜进行连接,构成了整个尾鳍鳍面。从本质上说,鳍的动作实际是在鳍条的带动下进行的。为鳍条的基本结构示意图。从鳍的厚度方向看,鳍条呈对称状分为两半,在整个长度方向上通过胶原蛋白和弹性纤维固定在一起。这两半在尖端处相互连接,在基部略微分开,各自与尾柄部的肌肉相连,基部则存在一软骨垫。一侧的肌肉收缩会带动这半边的鳍条基部产生一定的位移,从而驱使整个鳍条产生弯曲动作。两侧的肌肉交替动作使得鳍条实现往复摆动,由于在横向上的尺寸非常小,也就是鳍面很薄,使得弯曲幅度非常大。驱动多个鳍条的动作则形成了整个鳍面的形状,动作的鳍面在水中受到水的阻抗作用,使鱼获得向前的能量。对于尾鳍来说,所有的鳍条基本上同时同向动作,这就使得整个尾鳍呈现出一个二维的弯曲状态。
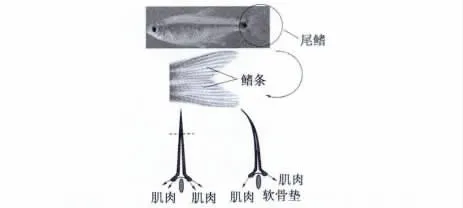
图1 鱼类尾鳍及其结构
1.2 仿生尾鳍推进器的结构设计
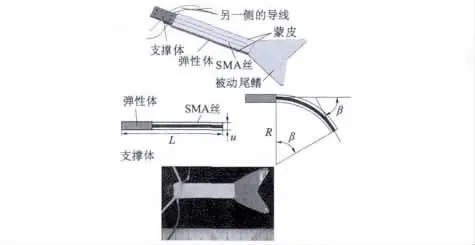
图2 仿生尾鳍推进器及动作原理
通过研究发现,现有的材料及驱动器完全照搬尾鳍的结构是困难的。由于尾鳍中多个鳍条的动作基本一致,因此在简化时仅仅模拟单个鳍条结构,并在宽度方向的尺寸上进行加大,同时为了增大推进性能,在仿生鳍条的后面附上柔软的模仿尾鳍形状的被动薄片,称之为被动尾鳍,这样一来整体结构近似于一个可来回摆动的仿生尾柄带动着一个被动尾鳍。仿生鳍条的结构则最大程度地模仿了真实鳍条的动作原理,是一种内嵌式SMA丝的结构。仿生鳍条由弹性体、SMA丝、蒙皮、支撑体和导线构成,如图2所示。弹性体的两侧各有一根SMA丝,单侧的每根SMA丝折成“U”字状,底端通过黏结等方式固定于弹性体的一端上,开口端固定于支撑体上,并与两根导线相连。这样的目的一方面方便给SMA丝供电,另一方面,同侧上相当于两根丝同时作用,应力效果将会大为增强。随后,通过支撑体拉紧SMA丝,并将支撑体与弹性体的另一端固连,这样在整个长度方向上SMA丝便与弹性体紧密贴合。最后,在SMA丝的外面覆上一层蒙皮,其作用一是给SMA丝绝缘,二是进一步固定SMA丝于弹性体上,三是蒙皮也会储存一部分弹性能。对比真实鳍条的结构,SMA丝同时起着肌肉和鳍条本体的双重功能,弹性体则模仿连接鳍条两半的胶原蛋白和弹性纤维,则起着存储能量的作用,为弯曲的回复提供动力。在材料选择上,弹性体一般由绝缘的PVC塑料片制成,蒙皮可以是乳胶蒙皮,也可以是流动性、成形性好的704硅橡胶等材料。
仿生鳍条的动作原理和真实鳍条类似:SMA丝在通电前处于预拉伸状态,给单侧的SMA丝通电加热之后,SMA丝发生马氏体逆相变,SMA丝开始收缩,当达到奥氏体转变完成相变温度点以后,SMA丝回复到原来的长度,收缩过程中保持一定的轴向应力,由于SMA丝在仿生鳍条中是偏心布置的,在这个偏心的应力作用下整个仿生鳍条就会产生弯曲动作,而由于SMA丝径、弹性体及蒙皮厚度都比较小,弯曲幅度也会很大。实现弯曲动作的同时,弹性体和蒙皮中都存储了足够的能量。给SMA丝断电之后,SMA丝会在水中快速冷却,发生马氏体相变,此时弹性体和蒙皮中存储的能量释放,SMA丝在此能量的带动下再次被拉长,仿生鳍条回到初始位置。给另一侧的SMA丝通电,仿生鳍条将会重复上一过程向另一侧弯曲,给两侧的SMA丝交替供电,则仿生鳍条实现来回摆动。当整个过程处于水中环境时,此仿生尾鳍便有了推进功能。
1.3 仿生尾鳍推进器的参数设计
SMA丝的最大应力可达800 MPa,足可以克服弹性体的弯曲应力,主要考量SMA丝的应变量对弯曲角度的影响。认为仿生鳍条在弯曲时一直保持圆弧状态,弯曲到最大角度时,通电侧的收缩量为δ,此时,另一侧的SMA丝被拉长,伸长量假设也为δ,R为仿生鳍条的弯曲半径;u为SMA丝中心与弹性体型心的距离;β为仿生鳍条的弯曲角度;L为弹性体的长度。仿生鳍条的弯曲角度同鳍条长度成正比,与SMA丝与中心的距离成反比,因此将SMA丝紧贴于弹性体,并选择丝径较小的SMA丝都有利于增大弯曲角度。初步选择弹性体长度L=40 mm,宽度W=10 mm,厚度h=0.4 mm。则当SMA丝的应变为2%时,最大弯曲角度β可达187°。
对于鱼类来讲,尾鳍的动作幅度及动作频率的选择直接影响了其推进速度和推进效率。一般对同一对象来讲,由于肌肉的限制,二者是存在着矛盾的,不可能同时增大或减小。而对于不同的对象来讲,在一个参数固定的情形下,增大另一个参数显然具备更强的推进能力。同样地,所研制的SMA丝驱动的仿生尾鳍也存在这种情况。由于SMA丝的应力比较大,各种型号的SMA丝基本都能完成大幅度的弯曲动作,但其驱动频率则根据丝径的变化差距很大,为此建立了SMA丝加热和散热时间与丝径的关系,式(1)表示出了在加热过程中,直径为dS的SMA丝温度由环境温度T0上升到T1时所需的时间tH,可见加热所需要的时间与成正比,与通电电压的平方成反比。
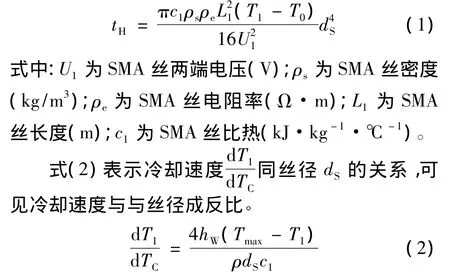
式中:hW为 SMA丝的等效表面传热系数;Tmax为SMA丝冷却开始的温度。
因此,选择丝径较小的SMA丝可以大为减小加热和散热时间,从而大幅度地提高驱动频率。为此,使用了直径为0.089 mm的Ni-Ti基SMA丝作为仿生尾鳍的驱动材料,其无应力状态下的相变温度依次为:Mf=43.4 ℃,Ms=52.2 ℃,As=51.4 ℃,Af=58.8 ℃。
2 仿生尾鳍推进器的推进性能实验研究
2.1 实验平台及往复摆动动作实验
为了验证仿生尾鳍推进器的动作效果及推进性能,搭建了其性能测试平台。测量时只测量前进方向的推进力,对侧向力不做测量。将仿生推进器置于500 mm×300 mm×200 mm的水缸中,与量程为10 mg的悬臂式微型力传感器的一端相连,力传感器另一端则固定在水缸上方的横梁上。由于力传感器满量程时最大输出仅为1.5 mV,因此在其输出端加了一个运算放大器,将力信号放大至0~5 V的标准信号。与对SMA丝的测量系统相同,也采用研华的PCI-1710HG数据采集卡和基于LabVIEW开发的采集界面作为推进力的采集平台。为了驱动和控制仿生尾鳍推进器的两根SMA丝,研制了基于PIC单片机的控制电路板,用来控制与两侧的SMA丝分别相连的两个MOSFET开关的通断,实现脉冲开环供电。SMA丝两端的驱动电压则由艾德克斯的大功率可编程稳压电源来提供。除此之外,为了记录仿生尾鳍推进器动作的全过程,采用了索尼HDRXR150E摄像机进行拍摄。
水温对SMA丝的加热和散热速度影响非常大,因此在实验过程中,要确保水温一直保持在22℃。给两侧SMA丝以差动方式通电,使得仿生尾鳍推进器能完成来回往复动作。为了提高频率,应把握好散热时间,即给一侧SMA丝断电之后,不等其完全回复到初始位置就给另一侧SMA丝通电。脉宽为通电收缩时间,用ton表示,脉间为散热回复时间,用toff表示。图3为通电电压为7.4 V,脉宽为400 ms,脉间为800 ms时,仿生尾鳍推进器在两个方向上的最大弯曲动作。从所研制的仿生尾鳍动作特点看,与传统的尾鳍相比,存在着以下优点:结构简单、紧凑,厚度方向上的尺寸与真实鱼类的尾鳍相媲美;不存在传动部件,动作过程中基本上无噪声;弯曲动作柔顺、平滑、可靠,动作幅度较大;模块化程度高,既可以单独作为水下机器人的推进器,又可以多个并合在一起共同为水下机器人提供推进动力。因此,利用SMA丝研制仿生化程度较高的仿生鳍推进器是完全可行的。
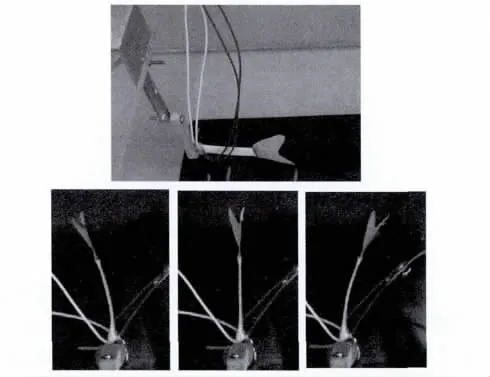
图3 仿生尾鳍推进器的动作示意图
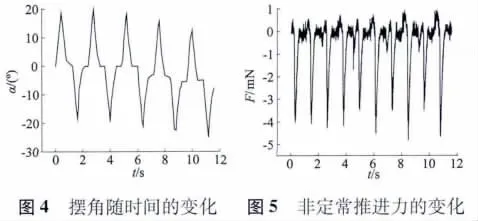
图4和图5分别表明了仿生尾鳍推进器在五个周期内弯曲角度及非定常推进力随时间的变化,从曲线中可以看出:(1)弯曲角度和推进力都以尖脉冲的形式周期性出现,在推进器往复摆动过程中,都产生了推进力。(2)推进器的外摆速度略高于回位速度,推进力也是在外摆过程中急剧增大,并在弯曲角度达到最大时达到最大值。(3)从动作的前两个周期可以看出,推进器向两侧摆动的角度基本一致,都在18°左右,对应的最大瞬时推进力也基本相同,约为4.1 mN。(4)而在后三个周期,推进器的中间位置不再保持为0°,而是偏离一定角度,其原因在于相反侧的SMA丝由于固定不牢等问题产生了一定的松动,使得推进器无法完全回到初始位置。与此同时,发现推进力的变化情况与弯曲角度的跟随性非常好,推进器转角大的一侧产生的推进力也相应变大。
2.2 通电参数对推进性能的影响实验
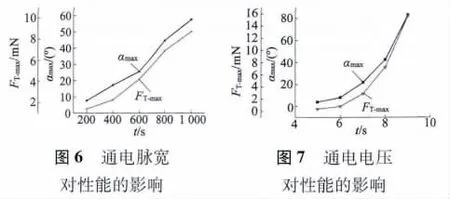
为了搞清通电参数对推进器推进性能的影响,分别完成了基于通电脉宽变化和基于通电电压变化的一系列实验。首先将电压固定在7.4 V,ton从200 ms到1 000 ms之间变化,相邻间隔200 ms,每个脉冲的toff为其对应ton的2倍。则推进器最大弯曲角度、最大瞬时推进力同通电脉宽之间的变化曲线如图6所示,可以看出这两项都存在着一个明显的拐点,对应着600 ms的脉宽,即增长速度在脉宽变化初期增大、在脉宽变化后期减缓。随着通电脉宽的增大,加热时间变长,SMA丝产生更大的收缩量,因此推进器的最大弯曲角度也在增大,然而由于供电电压保持不变,其角度不会一直增大,总会达到一个加热和散热的平衡状态。尾鳍的摆动速度是决定推进力的一个重要因素,在供电电压不变的情况下,其摆动速度也是固定的,决定推进力的只有最大弯曲角度一个因素,因此推进力呈现出来的变化曲线与最大弯曲角度的变化一致。
其次,将通电脉冲固定在ton=400 ms,toff=800 ms,驱动电压从5 V到9 V连续变化。则推进器最大弯曲角度、最大瞬时推进力同驱动电压之间的变化曲线如图7所示,可以看出,这两项都呈现出近似的抛物线状,即增长速度随通电电压的增大而增大。可见在动作频率固定的情形下,提高通电电压将会快速增大推进器的动作速度,也会大大增强推进器的推进能力。
2.3 被动尾鳍对推进性能的影响
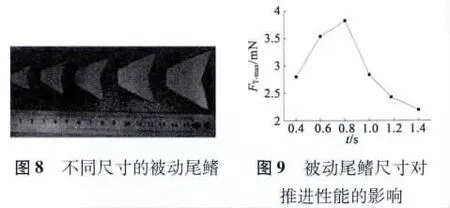
被动尾鳍的尺寸和形状对仿生尾鳍的推进性能存在着影响,这些影响都可以通过性能测试实验的方式进行研究。其意义一方面可以找到被动尾鳍最优的尺寸和形状,另一方面为研究真实鱼类尾鳍形状对推进性能的影响提供参考。首先研究被动尾鳍尺寸的影响,以展长为3.5 cm的被动尾鳍为标准,相对尺寸认定为1,按照比例分别制取其0.4~1.4倍大小的一系列形状相同、质地相同的被动尾鳍,如图8所示,然后粘贴在相同的仿生鳍条上进行性能测试。通过对其推进性能的测试发现,当其相对尺寸为0.8时,最大瞬时推进力达到最大值,如图9所示。其原因在于被动尾鳍尺寸从0.4到0.8增大时,带走的周围水的体积增大,从而增大了推进力。但是随着被动尾鳍进一步增大,其刚性也随着减小,这就使得被动尾鳍受到周围水的影响变大,其动作由主动动作变为被动动作,因而推进性能减弱。
其次考量被动尾鳍形状的影响。首先制作了展长均为3.5 cm的4个被动尾鳍,其形状分别为新月型、凹型、平头型和圆头型,如图10所示。随后分别对其进行推进性能测试,其最大瞬时推进力如表1所示。可见月牙型和凹型的被动尾鳍的推进性能要明显好于平头型和圆头型。这说明单纯的增大被动尾鳍的面积并不能够增大推进力,和形状有莫大的关系。这一点在真实鱼类的尾鳍形状中也得到了验证。一般来说由依靠身体波动推进的鱼类的尾鳍形状多成半圆形和梯形,且柔性较高,游速较慢。依靠尾鳍摆动推进的鱼类的尾鳍形状一般为新月型或凹型,且尾鳍刚性大,游速很高。
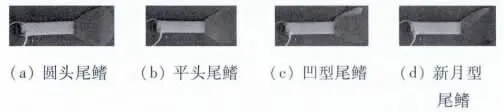
图10 不同的尾鳍形态

表1 不同的被动尾鳍形态对推进力的影响
2.4 仿生尾鳍推进器动作中形成的涡环实验
涡环在鱼类推进中起着重要的作用。为了验证尾鳍动作中的涡环机制,搭建了基于改性聚四氟乙烯微粉(PTFE)的液面流场显示系统。在该系统上对尾鳍推进器摆动后的涡环形成过程进行了可视化研究,研究表明该系统能较为准确地反映流场状态,为研究流场形态提供了实验平台。PTFE微粉是由高分子量PTFE树脂通过特殊工艺加工得出,平均粒径在3~15 μm左右,密度小,具有极佳的耐磨性、不粘性、电气绝缘性和极低的摩擦系数,且几乎对所有的化学物质和溶剂呈惰性。
对于一些三维流动来说,常常通过一些截面来对其流场状态进行显示和分析,如DPIV中的片光照亮的流场区域即为三维流动的一个截面。而水面是一个天然的流场截面,因此本课题中尝试搭建液面流场显示系统。实验时首先将PTFE微粉均匀地撒在水池液面上,由于微粉的跟随性极佳,液面上微小的流动都会通过微粉显示出来。随后将尾鳍推进器固定于水池中,整体略高于水面,以便对液面产生扰动。随后用9 V电压、400 ms的脉宽,800 ms脉间对尾鳍推进器进行驱动,使其往复摆动。图11即为单次脉冲下,尾鳍推进器单侧摆动及回复过程中液面涡流的形成变化过程。其具体过程可描述为:尾鳍外摆时,靠近尾鳍末端内侧首先形成一个漩涡结构,当摆到最大幅度时,此漩涡也达到最大。随后尾鳍进行回复动作,此时靠近尾鳍末端在外侧形成了一个反向的涡流,随着回复动作的进行,这个涡流也进一步增大,当回复到一定程度时,两股涡流都从尾鳍附近脱落开来,并耦合在一起,形成一个完整的涡环结构,并向斜下方运动并逐渐衰减。
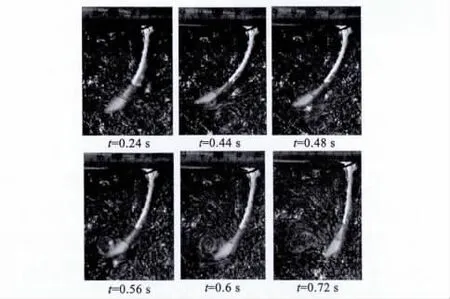
图11 仿生尾鳍推进器动作形成的涡环实验
3 结 语
对仿生尾鳍推进器的动作和性能测试实验表明,SMA丝作为驱动器能够使得仿生鳍推进器实现大幅度的柔性动作,仿生效果好、可控性好、结构简单、模块化程度高且无噪声,推进器的最大瞬时推进力可达15.8 mN,具备了足够的推进性能。因此,研制的仿生鳍推进器及其测试平台可为研究鱼类鳍的游动机理提供实验的自动化平台,方便地研究鳍的动作参数及形态尺寸对推进性能的影响。在所搭建的液面流场可视化系统上对仿生尾鳍推进器动作过程中产生涡环的显示实验进一步验证了涡环在水中生物推进中重要的推进作用,并提供了有效的研究手段。
[1] 童炳刚,陆夕云.关于飞行和游动的生物力学研究[J].力学进展,2004,34(1):1-8.
[2] Mit.RoboTuna[EB/OL].[2004-07-07].http://web.mit.edu/towtank/www-new/Tuna/tuna.html.
[3] 梁建宏,邹丹,王松,等.SPC-II机器鱼平台及其自主航行实验[J].北京航空航天大学学报,2005,31(7):709-713.
[4] 成巍.仿生水下机器人仿真与控制技术研究[D].哈尔滨:哈尔滨工程大学,2004:21-22.
[5] Aureli M,Kopman V,Porfiri M.Free-locomotion of underwater vehicles actuated by ionic polymer metal composites[J].IEEE/ASME Transactions on Mechatronics,2010,15(4):603-614.
[6] McGovern S T,Abbot M.Evaluation of thrust force generated for a robotic fish propelled with polypyrrole actuators[J].Polymer International,2010,59:357-364.
[7] Ye X F,Su Y D,Guo S X,et al.ICPF actuator-based novel type of 3D swimming microrobot[C]//International Conference on Mechatronics and Automation,Proceedings of IEEE.2008:557-562.
[8] 杭观荣,王振龙,李健,等.基于柔性鳍单元的尾鳍推进微型机器鱼设计研究[J].机器人,2008,30(2):171-181.
[9] Kodati P,Deng X Y.Experimental studies on the hydrodynamics of a robotic rstraciiform tail fin[C]//International Conference on Intelligent Robots and Systems,Proceedings of IEEE/RSJ.2006:5418-5423.
[10] 敬军,吴燕峰,尹协振.C形起动时鱼尾模型的流场结构[J].中国科学技术大学学报,2007,37(10):1237-1241.
猜你喜欢
舰船科学技术(2021年12期)2021-03-29
南方农业学报(2020年7期)2020-11-09
机械工程师(2018年1期)2018-12-29
当代陕西(2018年12期)2018-08-04
东方法学(2017年4期)2017-07-13
中北大学学报(自然科学版)(2016年6期)2016-12-23
微特电机(2016年8期)2016-11-26
学习月刊(2015年10期)2015-07-09
空气动力学学报(2014年5期)2014-04-30
游泳(2014年3期)2014-03-27