一种改进的单相无刷直流电动机驱动器的控制方法
2013-02-22 08:23:10赵瑞萍王晓嘉原慧芳
微特电机 2013年7期
赵瑞萍,王晓嘉,原慧芳
(中国电子科技集团公司第二十一研究所,上海200233)
0 引 言
无刷直流电动机具有体积小、控制简单、效率高、稳态转速误差小以及维修保养简单等优点,而且随着稀土永磁体技术的发展,它在运动控制领域得到了广泛应用。
无刷直流电动机的转子由永磁材料制成,定子由电枢绕组组成。绕组的相数最常用的有单相、三相和四相。每相绕组分别与电子开关电路相连接,电子开关电路中的功率开关管由位置传感器的信号控制。无刷直流电动机由电动机本体、转子位置传感器和电子开关电路三部分组成[1]。
无刷直流电动机在换相过程中会引起转矩波动增大、平均转矩下降等许多问题。随着电机速度的增加,这些问题会变得更加突出。采用适当提前换相控制可以提高电机的输出转矩,从而提高系统的效率,同时,准确地选择提前换相点还可以有效减小系统的转矩脉动[2]。
本文对单相无刷直流电动机的控制算法做了一些改进,将分段PWM控制与提前换相相结合,提高了整个系统的效率,并抑制了部分转矩脉动。
1 单相无刷直流电动机驱动器的控制原理
单相无刷直流电动机的基本结构如图1所示。定子铁心由数片硅钢片叠装组成,铁心上设置了4个齿和槽,围绕每个齿分别用漆包线绕制成绕组1、2、3、4。电机转子由磁钢组成,磁钢的磁极与定子的齿和槽相对应。霍尔芯片用来检测磁钢的磁极信号。当电机转子位置变化时,霍尔芯片的输出逻辑信号也相应变化,并将信号传递到控制电路中。一般可以设定当磁极N转到靠近霍尔芯片时,霍尔芯片输出高电平信号;当磁极S转到靠近霍尔元件时,霍尔芯片输出低电平信号。
通常情况下,单相无刷直流电动机的PWM控制采用H桥控制方式,驱动电路由图1所示的4个功率器件V1、V2、V3、V4构成,功率器件的输出端连接到串连后的电机绕组两端。电机的位置信号由霍尔传感器检测,输出信号输入到单片机,由单片机经过一系列逻辑判断,输出PWM指令信号。正转时逻辑驱动电路给出开通信号控制V1和V4开通,另外一组功率器件闭合;反转时逻辑驱动电路给出开通信号控制V2和V3,另外一组功率器件闭合,电流反向流通,换相点是通过检测霍尔元件的状态,在霍尔元件发生变化的点改变开关逻辑。使用PWM输出信号来控制H桥的4个开关,改变PWM输出信号的占空比可以调整电机电压,改变加在电机上的电压,可以改变电机的转速[1]。对于本文的实际要求,负载为200 mm/31°的风扇扇叶,要求其运行在额定转速1 500 r/min,因此只需要由CPU给定逻辑驱动电路一个固定的PWM指令值。即可满足控制要求。这个指令信号再由逻辑驱动电路变换输出给4个功率器件的开关信号,从而实现单相无刷电机的换相。系统原理图如图1所示。
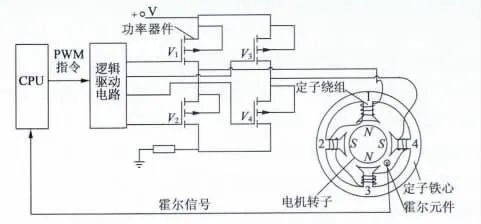
图1 单相无刷直流电动机及控制器结构图
2 改进的控制算法
无刷直流电动机控制器电流波形滞后于反电动势一定的时间,造成了电机输出转矩下降,采用超前换相控制可以减小电流滞后的时间,当反电动势升高时,相电流迅速升高,从而达到增大输出转矩、提高效率的目的[3]。同时,还改进了通常的给定单一占空比的控制方法,在检测到正常换相点时,给定一个较高的占空比,使相电流迅速增加,而在到达提前换相点时,给定一个稍低一点的占空比,这样,既可增大输出转矩又可达到要求的转速。
无刷直流电动机软件控制算法是:通过检测到的霍尔元件的状态,给逻辑驱动电路芯片的开关信号相应的逻辑电平,这些逻辑电平输出给四个功率器件,通过功率器件轮流导通,这样就实现了电机的换相。电机的速度由PWM信号来控制,给定不同的占空比可以得到不同的速度。利用定时器的捕获功能来记录电机每一圈的计数脉冲,这样可以估算出电机的位置。
本文改进了传统的PWM调制方式,采用分段PWM和提前换相相结合的方式供电。在软件算法中,程序的每一个换相周期内,刚开始给定高一点的占空比,到达提前换相点时给定稍低一些的占空比。这种方式可以使电动机的电流比正常给定同样占空比的方式更快速地达到比较高的值,从而使电流和反电动势的乘积增高,这样可以增大电机的输出转矩,从而增大电动机的输出功率,提高效率。为了克服相电流滞后反电动势引起的转矩下降,在程序中加入了超前换相的算法,当程序中检测到霍尔信号改变,进入中断,需要根据霍尔元件的电平状态输出开关的换相逻辑,而在正常需要换相的时刻之前提前就进行换相逻辑的输出。具体提前换相的时间还可以在程序中修改参数加以调整,从而可以大大提高系统的效率。
具体实现方法如图2所示,虚线框内示意提前换相的算法逻辑,点划线框表示分段PWM算法。程序初始化阶段先给定一个80%的占空比,然后通过单片机的I/O口检测当前霍尔状态,按照当前霍尔状态给定正常的开关换相逻辑,一旦主程序中扫描检测到电机运行至每半圈的11/12位置时,则立即给定另一霍尔状态所对应的开关换相逻辑,这样就实现了提前换相的算法。同时,在这一位置,将占空比给定为50%,这样就实现了分段PWM调制。定时器的捕获功能在外部电平变化中断中实现,霍尔元件每次电平变化进入中断,记录上一个半圈所对应的计数值,计算出165°(即每半圈的11/12位置)所对应的计数值,以备在程序中判断提前换相点。此电机扇叶额定转速为1 500 r/min,只需要记录溢出次数来判断电机的位置。
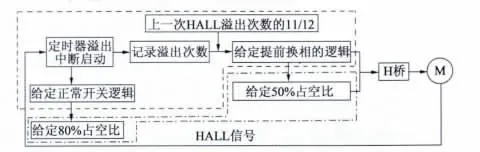
图2 算法逻辑图
3 单相无刷直流电动机驱动器的实现
为了验证和应用改进的控制方法,设计了单相无刷电动机的驱动器,硬件电路框图如图1所示。
电动机由霍尔元件检测其位置信号,位置信号输入给CPU,CPU采用ATMEL公司的单片机AT-mega88,由CPU判断霍尔元件的状态,输出相应的PWM指令信号给驱动芯片IR2109,此芯片输出相应的开关信号给四个功率器件MOSFET开关管,这四个开关管组成的H桥输出供给绕组的电压。硬件电路较之传统的无刷直流电动机控制电路并无改变。
软件程序采用C语言编写,在Atmel公司AVR Studio开发环境进行编译。软件流程图如图3所示。

图3 软件流程图
4 实验波形及结果分析
图4是通过实验得到的普通换相方式的驱动器电流波形,单独采用分段PWM方式供电的驱动器电流波形如图5所示。同时采用分段PWM和超前换相相结合的控制方式,并且调整相关参数,可以将驱动器的效率提高到最大值,驱动器电流波形如图6所示,比较以前的波形,更加接近正弦波。
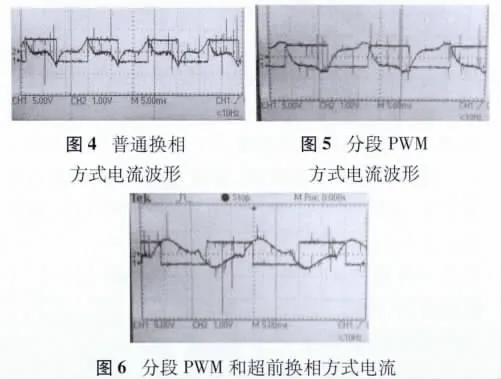
对同一台电机进行测试,在输入交流电压220 V、负载为带动扇叶200 mm/31°、逆时针旋转、转速控制在1 500 r/min的情况下,对三种控制方式的输入功率进行了测试,如表1所示。正常换相的电机输入功率为14.6 W,采用优化方法后,同样情况下,电机的输入功率为11.2 W,可以看到电机的效率得到了较大的提高。

表1 采用三种不同控制方式的输入功率
5 结 语
通过以上的实验波形以及数据分析,可以看出,采用本文中提出的改进型控制算法,可以将效率提高20%以上,而且从实际测出的电流波形可以看出,转矩脉动也得到了一定程度的抑制。而且由于所采用的改进方法用软件来实现,不需要在硬件上作任何改动,并未增加设计费用以及元器件成本,所以对于后续的推广应用较为方便。
[1] 张琛.直流无刷电动机原理及应用[M].2版,北京:机械工业出版社,2004:14-23,128-136.
[2] 罗宏浩,吴峻.永磁无刷直流电机换相控制研究[J].中国电机工程学报,2008,28(24):108-112.
[3] 包向华,章跃进.五种PWM方式对无刷电动机换相转矩脉动的分析和比较[J].中小型电机,2005,32(6):48-52,55.
猜你喜欢
电脑爱好者(2020年6期)2020-05-26 09:27:33
童话王国·文学大师班(2017年6期)2017-07-10 05:54:07
光学精密工程(2016年5期)2016-11-07 09:06:04
通信电源技术(2016年4期)2016-04-04 02:57:12
太空探索(2015年6期)2015-07-12 12:48:42
电测与仪表(2015年11期)2015-04-09 11:46:34
上海电机学院学报(2015年3期)2015-02-28 14:29:52
电测与仪表(2014年11期)2014-04-04 09:21:36
计算物理(2014年2期)2014-03-11 17:01:41
河南科技(2014年24期)2014-02-27 14:19:40