
锻造操作机升降倾斜机构的设计
2012-11-11 01:33刘军毅成法坤蔡军党
重型机械 2012年3期
马 波,刘军毅,刘 畅,郝 瑾,成法坤,蔡军党,郝 乐
(中国重型机械研究院有限公司,西安 710032)
0 前言
钳架是操作机的一个主要组成部分,位于操作机的中心位置。它由钳口装置、旋转机构、夹紧机构、钳架本体等主要部分组成,完成锻件的夹持和绕自身的轴线自转。不同尺寸、形状的锻件在锻造过程,其中心线离砧面高度不同,要求钳架能够相应的平行升高或者平行降低;从地面拾取锻件或者放置锻件到压机砧面,要求钳架能够下倾、上倾。钳架通过销轴,以及设在其钳架本体上的铰支点,和钳架升降倾斜机构连接。
1 双平行四连杆机构钳架的工作原理
中国重型机械研究院为某铝加工企业设计、制造的一台50 kN具备装出料机功能的有轨液压操作机,钳架升降倾斜机构采用了双平行四连杆机构,平行四连杆机构安排在机体的两侧[1]。该机构结构简图如图1所示。
根据不同的使用工况,钳架升降倾斜机构应满足钳架平行升降、倾斜动作、行程范围及速度的要求。同时考虑到锻造过程对钳架冲击和振动大的特点,还应该在钳架升降倾斜机构中设置缓冲装置,以保证设备自身整体结构的安全性、稳定性。缓冲装置包括水平缓冲装置和垂直缓冲装置,能够使钳架自动复位。
根据图1可知:双平行四连杆升降倾斜机构的特点是具有两个平行四连杆,它可以使钳架(钳杆)轴线始终保持平行,即始终保持在水平线上。两个平行四连杆为A1B1B2A2和B1C1C2B2。
当钳架进行平行升、降动作时,倾斜缸不参与工作,A1点固定不动。前曲杆A2B2C2绕固定点A2点转动,后曲杆A1B1C1绕A1点转动。钳架B1EB2F与前后曲杆铰接与B1、B2两点。钳架的平行升降通过平行升降缸的运动来实现的,平行升降缸的缸体和钳架铰接与E点,平行升降缸的柱塞和后曲杆铰接与F点。平行升降缸设计为复合缸,在柱塞里面集成一个小柱塞,在工作超载时,起缓冲保护作用。当平行升降缸的缸体进油时,柱塞向右移动,EF的距离增大,迫使后曲杆绕A1点顺时针方向转动,带动B1点升高。因为前曲杆和后曲杆平行并且相等,则同步带动前曲杆绕A2点顺时针方向转动,B2点同步升高。通过平行四连杆机构A1B1B2A2使钳架平移上升。反之,当平行升降缸的缸体排油时,在锻件和钳架等自重的作用力下,柱塞向左移动,EF的距离减小,迫使后曲杆绕A1点逆时针方向转动,实现钳架平行下降。当平行升降缸的缸体即不进油、也不排油时,EF的距离保持不变,平行四连杆机构B1C1C2B2受到平行升降缸的约束,形状将固定不变。此时,前曲杆、钳架、后曲杆和平行四连杆变成一个整体,相当与一个刚性构件,铰接与A1、A2点上。由于A1、A2点固定不动,所以,在平行升降缸不工作时,钳架保持在一定位置不动。
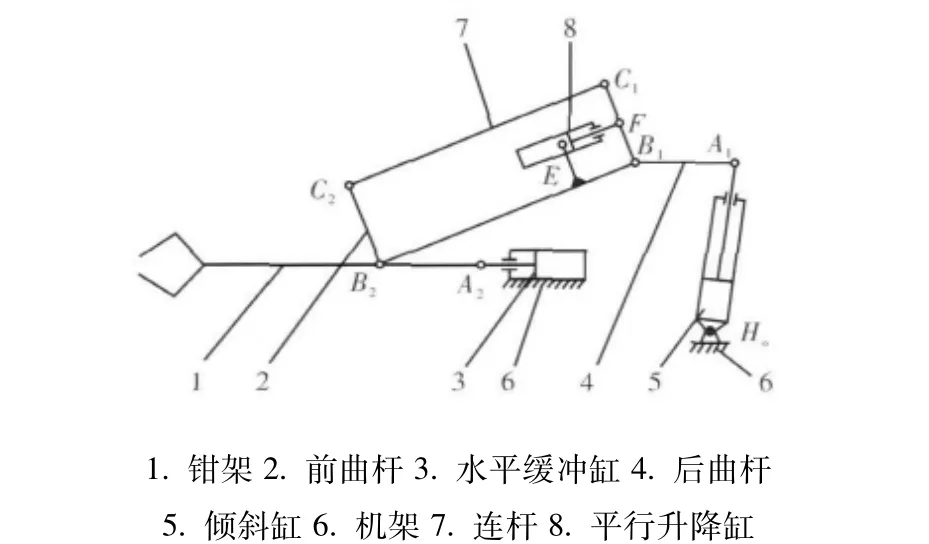
图1 双平行四连杆机构钳架示意图Fig.1 Diagram of tong frame for doubl-parallel four-rod mechanism
当钳架进行倾斜动作时,倾斜缸进行工作,平行升降缸不参与工作。A点及整个构件绕固定点A2转动,使钳架上倾或者下倾。
通过上述运动特点可知,第一个平行四连杆A1B1B2A2的作用是保证钳架实现平行升降,第二个平行四连杆B1C1C2B2的作用是:①在平行升降缸不工作时,能够使钳架保持在一定位置;②在平行升降缸工作时,保证前、后曲杆能够同步转动而不受阻碍。
2 双平行四连杆钳架升降倾斜机构的分析
2.1 双平行四连杆机构钳架升降运动分析
双平行四连杆升降倾斜机构尺寸示意如图2所示。

图2 双平行四连杆机构钳架升降运动分析图Fig.2 Analysis chart of lifting motion of tong frame on doubl-parallel four-rod mechanism
钳架的平行升降通过前曲杆A2B2C2绕固定点A2点转动,后曲杆A1B1C1绕A1点转动来实现的。钳架的升降范围H根据用户具体使用条件提出 (已知),转角 α2、β2根据经验取值(30°~35°)。
则:

可求出杆A2B2的长度,同样方法,也可求出杆A1B1的长度。
杆B1C1、杆 B2C2以及连杆 C1C2的长度,主要是考虑平行升降缸和钳头旋转机构的安装位置,在保证整体结构紧凑,又要便于日后维修拆装的基础上,设计合理长度即可。
由图2可知:
2.2 双平行四连杆机构钳架倾斜运动分析
图3为钳架倾斜运动示意图。由图3可看出,δ1为钳架上倾最高位置时摆动的角度,一般根据经验值取5°~7°;δ2为钳架下倾着地位置时摆动的角度;根据钳头着地要求做图可以确定。
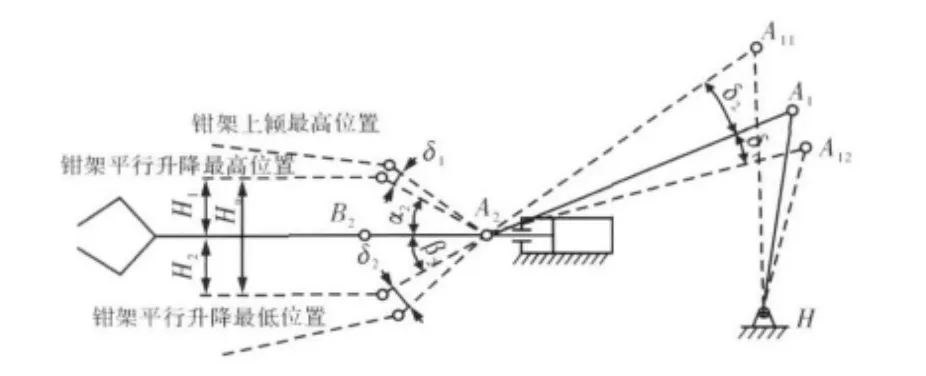
图3 双平行四连杆机构钳架倾斜运动分析图Fig.3 Analysis chart of tilting motion of tong frame on doubl-parallel four-rod mechanism
在设计过程中,确定δ1、δ2的数值后,以A1A2为半径,分别向上、向下旋转角度δ1、δ2,即可得到A11、A12两点的位置。
则倾斜缸的行程S为:A11H-A12H
3 设计过程中的有关参数计算
中国重型机械研究院设计制造的一台50 kN有轨液压操作机,钳架升降倾斜机构采用了双平行四连杆机构。其中,用户对设备的使用参数提出要求。
(1)要求钳架平行升降高度为1000 mm。从设备整体布局合理的角度出发,设计过程中,设计杆B1C1的长度为875 mm、杆B2C2的长度为875 mm、连杆C1C2的长度为2750 mm。
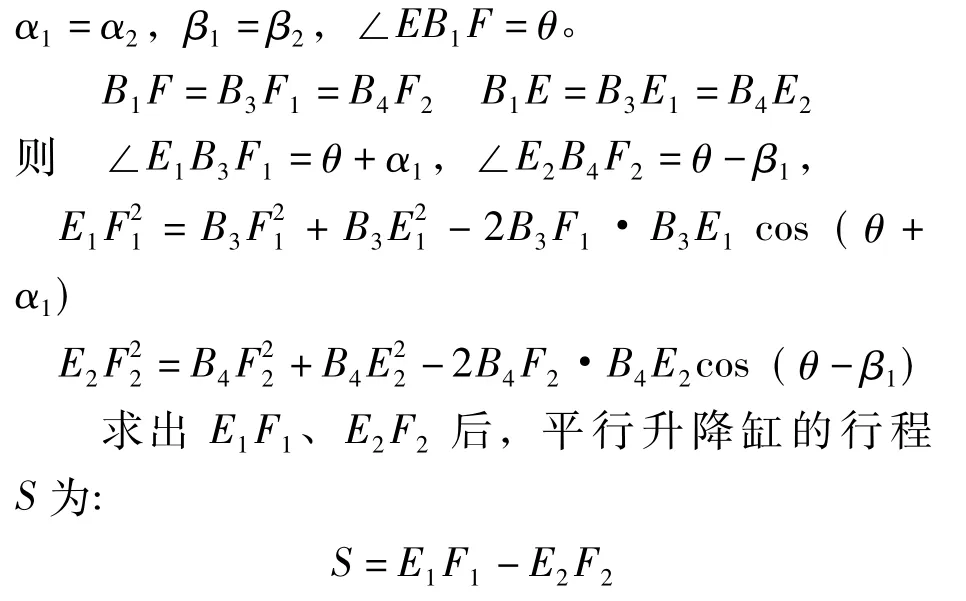
同理,设计∠EB1F=θ=55°,α1=α2=30°
B1F=B3F1=B4F2=437.5 mm
B1E=B3E1=B4E2=750 mm
根据公式,圆整计算数据,得出E1F1=830 mm,E2F2=395 mm。
则,平行升降缸的行程S为:S=E1F1-E2F2=435 mm
根据以上设计数据,可以确定平行升降缸的行程 S、杆 A1B1、杆 A2B2、杆 B1C1、杆 B2C2、杆C1C2的长度。
(2)要求钳杆上倾角度7°,下倾着地。钳架下倾着地位置时摆动的角度δ2(设计过程中,确定有关机械结构参数后,通过作运动轨迹图得出此角度)
由运动轨迹得知
则倾斜缸的行程S为:A11H-A12H=680 mm,实际设计过程中,选择倾斜缸时,可使缸的行程留有一定余量。
根据以上设计数据,可以确定倾斜缸的行程S。
上述计算过程表明,在有关参数已知的条件下,通过分析导出的计算公式,可以确定钳架升降倾斜机构中的一些重要机械结构尺寸。
4 结论
(1)采用此钳架升降倾斜机构的50 kN有轨液压操作机,从2009年投产至今,一直在用户现场正常使用,取得了显著的经济效益和社会效益,表明此设计结构合理、传动布置紧凑、运行安全可靠。
(2)本文通过对钳架双平行四连杆机构的升降倾斜运动分析,得出有关钳架设计的一些基本思路和计算公式,可以帮助设计人员在以后的有关设计中,减少设计工作量。
[1] 刘畅,刘军毅.带装出料功能的5t多功能有轨液压锻造操作机[J].重型机械,2010(5)11.
[2] 余发国,高峰,郭为忠等.锻造操作机的回顾与展望[A].中国机构与机器科学应用国际会议论文集[C].上海:中国机械工程学会机械传动分会机构学专业委员会,2007:09-10.
[3] 牛勇,张营杰,房志远等.1000 kN/2500 kN·m锻造操作机吊挂装置仿真研究 [J].重型机械,2011(2):19.
[4] 陈宏伟,谢春普,张树庆,等.操作机钳杆旋转减速机失效分析 [J].重型机械,2012(2):62.
猜你喜欢
机械工程与自动化(2022年3期)2022-06-24
石油矿场机械(2022年3期)2022-06-17
新高考·高一数学(2022年3期)2022-04-28
思维与智慧·上半月(2022年4期)2022-04-08
小哥白尼(神奇星球)(2021年4期)2021-07-22
装备制造技术(2020年11期)2021-01-26
装备制造技术(2020年2期)2020-12-14
钻采工艺(2020年1期)2020-07-21
汽车实用技术(2017年16期)2017-09-21
汽车观察(2016年3期)2016-02-28
