
直流伺服系统模型及其辨识
2012-10-24 06:47刘琼
上海电气技术 2012年1期
刘 琼
(太原理工大学 阳泉学院,山西阳泉045000)
1 直流伺服系统概述
1.1 直流伺服系统介绍
伺服系统又称为随动系统,是构成自动化体系的基本环节,是由若干元件和部件组成的具有功率放大作用的一种自动控制系统。伺服系统按组成系统元件的物理性质分为电气伺服系统、电气液压伺服系统和电气气动伺服系统。电气伺服系统又分为直流伺服系统和交流伺服系统,20世纪70年代直流伺服应用广泛,直流电动机调速范围宽,启动停止方便,转矩大,系统消耗能量小,且广泛应用于对控制性能要求比较高的伺服系统中[1]。
直流伺服系统包括位置环、速度环和电流环,结构图如图1所示。
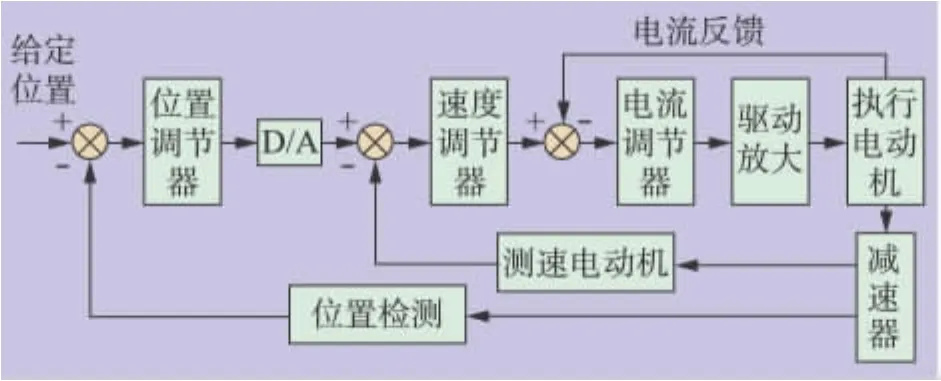
图1 直流伺服系统结构图
直流伺服系统适用的功率范围很宽,包括从几十瓦到几十千瓦的控制对象。通常从提高系统效率的角度考虑,直流伺服系统多应用于功率在100W以上的控制对象。直流电动机的输出力矩与加于电枢的电流和由激磁电流产生的磁通有关。当磁通固定时,电枢电流越大,则电动机力矩越大。当电枢电流固定时,增大磁通量能使力矩增加;因此,通过改变激磁电流或电枢电流,可对直流电动机的力矩进行控制。对电枢电流进行控制时称电枢控制,这时控制电压加在电枢上。若对激磁电流进行控制,则将控制电压加在激磁绕组上,称为激磁控制[2]。
电枢控制时,反映直流电动机的力矩T与转速N之间关系的机械特性基本上呈线性特性如图2所示。

图2 直流电机的机械特性
图2中,Vc1,Vc2为加在电枢上的控制电压,负斜率D为阻尼系数。电枢电感一般较小,故电枢控制可以获得很好的响应特性。缺点是负载功率要由电枢的控制电源提供,因而需要较大的控制功率,增加了功率放大部件的复杂性。如对要求控制功率较大的系统,必须采用发电机——电动机组、电机放大机和可控硅等大功率放大部件。
激磁控制时要求电枢上加恒流电源,使电动机的力矩只受激磁电流控制。恒流特性可通过在电枢回路中接入一个大电阻(10倍于电枢电阻)来得到。对于大功率控制对象,串联电阻的功耗会变得很大,很不经济;因此,激磁控制只限于在低功率场合使用。电枢电源采用恒流电源后,机械特性上的斜率等于零,引起电动机的机电时间常数增加,加之激磁绕阻中的电感量较大,这些都使激磁控制的动态特性较差,响应较慢。
1.2 直流电动机模型介绍
直流电动机是很常见的一种驱动设备,其原理如图3所示,广泛应用在各种工业控制应用中,如机器人、数控机床、自动生产线、电动车辆、无人驾驶飞行器等。在研究网络控制系统时,选择直流电动机作为被控对象很具有典型性。由于直流电动机的响应速度很快,时间常数较小,对控制回路中的时延比较敏感,故可以很好地展示网络时延对控制性能的影响[3]。
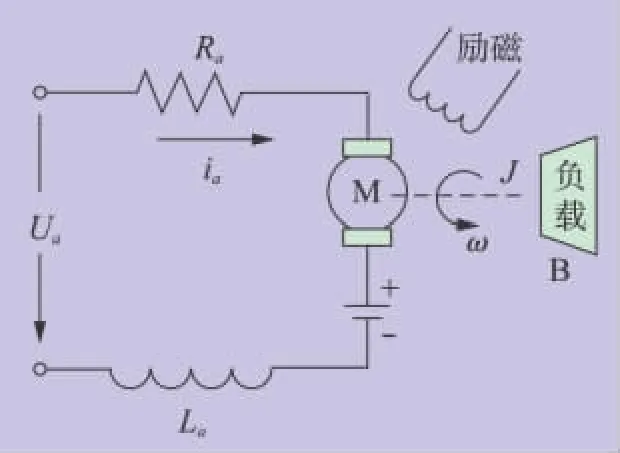
图3 直流电动机原理图
直流电动机的电气方程和机械方程分别为
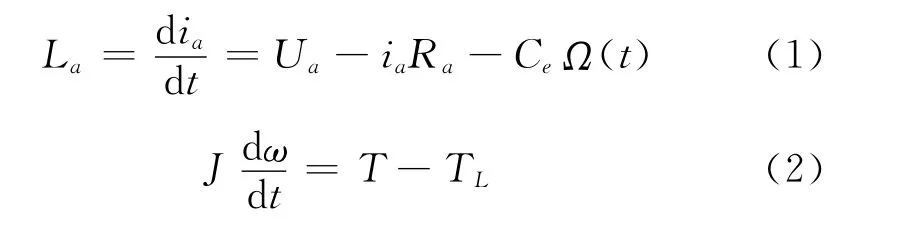
式(1)中,下标a表示电枢;Ra表示电枢绕组电阻;ia为电流;Ua为电枢外加电压值;Ce为电机电势系数,且该常数与电机结构有关;La为电枢电感,且该电感值很小;t表示时间;Ω(t)则表示转速随时间的变化函数。也就是说输入电流的变化会引起转速的变化或者理解为负载与所需输入功率之间的依变关系。式(2)中,下标L表示负载(Load)端参数;T=Cτia为电机电枢的输入扭矩;Cτ为电机的转矩常数;J为折算到电机轴上的总转动惯量,ω为角速度。该式表述的是电机在负载变化时的力学平衡关系,输入量与输出量之差等于变化率。
将式(1)进行拉普拉斯变换,并进行计算,整理得直流电动机转速相对于输入电压的传递函数模型为

式中,s为拉普拉斯变换的复变量;机械时间常数Tm=JRa/CeCτ,一般定义为从启动到达到空载转速的63.2%所需要的时间;电气时间常数Ta=La/Ra。一般情况下,电机的传递函数可看作两个惯性环节的串联,这两个惯性环节的时间常数就分别是机械时间常数Tm和电气时间常数Ta,且Ta一般很小,对应的惯性环节也可忽略不计。
获取过程传递函数模型最常用、最方便的方法是直接辨识法。利用直接辨识算法对传递函数参数进行估计,可得到比较精确的结果[4]。
二阶无滞后传递函数模型为
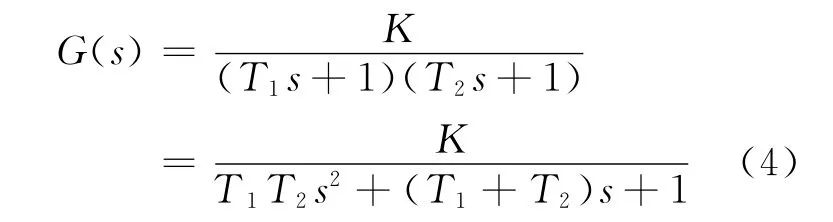
式中,T1,T2分别对应式(3)中的Tm和Ta;K=1/Ce,分析比较式(3)、(4)可知,二阶无滞后传递函数模型与直流电动机传递函数模型形成对应关系,由于Ta≤Tm,故近似认为Tm+Ta≈Tm;因此,可通过对二阶无滞后传递函数模型进行直接辨识来辨识直流电机的传递函数模型。
2 系统辨识
2.1 系统辨识原理
系统辨识是指当用户无法从物理上得出所研究系统的数学模型,但可以通过适当的实验手段测试出系统的某种响应信息时,就可以根据它来获得系统的数学模型。系统辨识一般有两种策略:① 根据频率响应的数据辨识系统模型,该想法源于Levy复数曲线拟合法,引入拟合性能指标J。令J的各导数为0,即可获得J最小值。阶跃响应和脉冲响应均可以通过数值微分和数值积分转化为频率响应数据。② 已知输入输出数据辨识系统模型,此想法基于最小二乘思想进行求解。
系统辨识包括系统的输入输出数据、模型类和等价准则3大要素。模型类主要指规定的连续时间或离散时间模型、输入输出模型或状态空间模型、确定性模型或随机模型、线性模型或非线性模型。规定了模型类后,再由输入输出数据按结构辨识的方法确定系统的结构参数,并用参数辨识的方法辨识系统的参数。等价准则用于衡量模型接近实际过程的程度,并且通常表示为误差的泛函。
2.2 基于阶跃响应数据的辨识
对于稳定系统,通常在系统阶跃响应曲线上定义系统动态性能指标。因为,系统的单位阶跃响应不仅完整反映了系统的动态特性,而且反映了系统在单位阶跃信号输入下的稳定状态;同时,单位阶跃信号又是一个最简单、最容易实现的信号。推导基于阶跃响应的连续时间模型直接辨识方法比较简单[5]。对于MATLAB而言,有一个辨识工具箱,但主要是通过拟合确定模型参数,本设计需要利用阶跃响应数据直接辨识出被控对象,故通过编写M文件来实现系统辨识。
考虑一个二阶无滞后的被控对象

对于阶跃输入幅度为α时,阶跃响应

其中,β为振副幅扰动前后的系统响应时间比值,即敏感度。加入白噪声ω(t),则阶跃响应变为
式中,A(τ),B(τ)为过程积分;τ为时间。
于是得


对过阻尼(ε>1)、欠阻尼(ε<1)和临界阻尼情况(ε=1),式(12)均成立。
由式(12)可对模型参数进行最小二乘运算,对采样点τ=Ts,2Ts,3Ts,…,nTs。其中,Ts为采样间隔;n为采样的点数。可构成线性方程组:
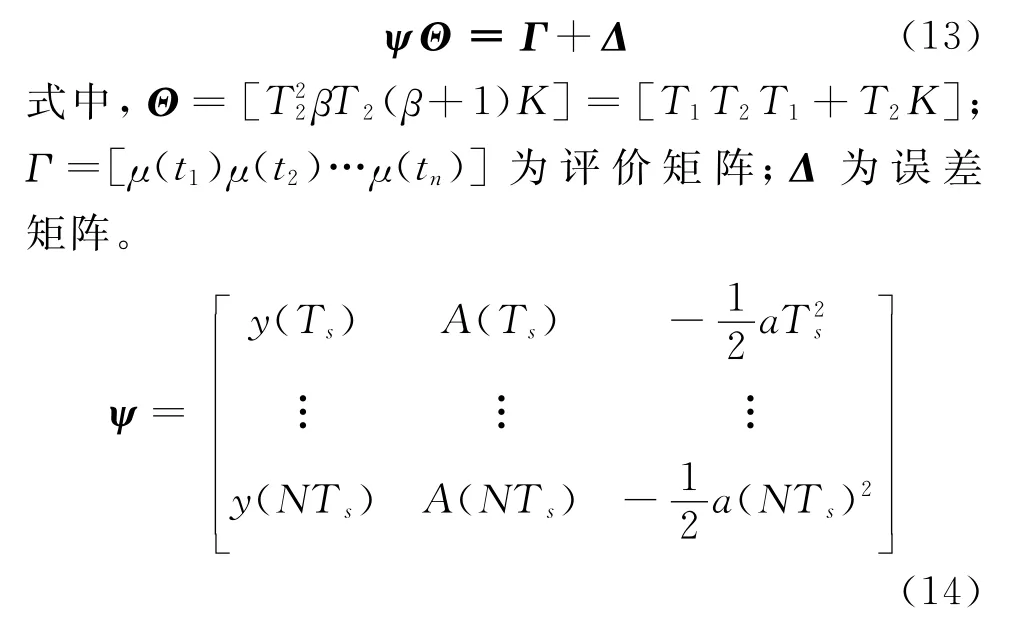
由此可得参数Θ的最小二乘估计为

Θ为待识别参数矩阵。
3 数值仿真
由于直流伺服系统要实现位置闭环、速度闭环和电流闭环,则直流伺服系统为三阶系统,即可理解为电动机二阶系统再加上一个积分器1/s。
此电动机为二阶系统,G(s)motor=则需要根据辨识原理辨识出K,T1和T2参数。
实际测量的阶跃响应数据如表1。
由式(15)可以算出参数Θ,再由Θ= [T1T2T1+T2K]可以计算出K,T1和T2参数大小。T1,T2和K参数计算公式如下:

表1 阶跃响应数据

其中,Θ(1)、Θ(2)、Θ(3)表示不同阻尼时,不同的参数矩阵。
通过 MATLAB 编 程,得K=1.116,T1=0.058 7,T2=0.004 2。
由于直流伺服系统还有位置闭环,相当于电动机传递函数乘以1/s,故直流伺服系统传递函数为

对式(17)中所辨识的系统进行仿真,其阶跃响应如图4所示。
利用MATLAB数据拟合工具箱,对实际测量的阶跃响应数据进行处理,结果如图5所示。
比较图4和图5可知,阶跃响应和阶跃响应数据图相符,说明辨识出的系统准确。
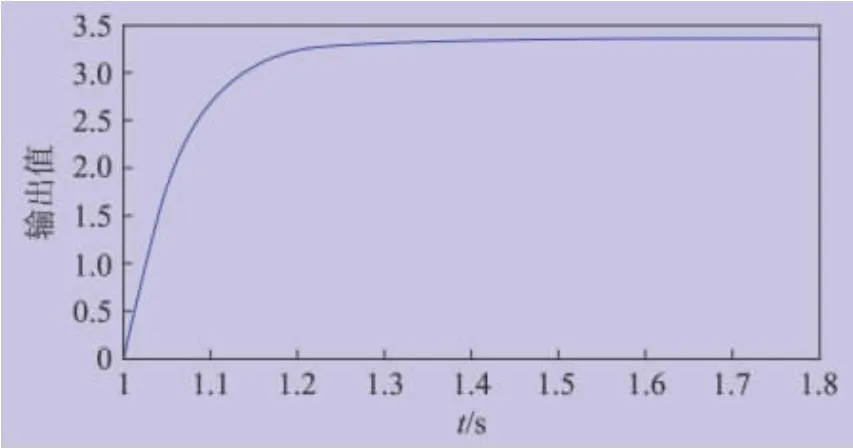
图4 辨识系统的阶跃响应图

图5 阶跃响应数据图
4 结 语
本文完成了对直流伺服系统的建模以及辨识,尤其是利用系统的阶跃响应数据对直流伺服系统的模型进行了直接辨识,即由系统阶跃响应采样数据构造线性方程组,通过对方程组求解估计出系统参数。最后对辨识出的系统进行仿真,将仿真结果与原阶跃响应数据比较表明:所采用的辨识方法取得了良好的辨识效果。
[1]陈 峰.可穿戴型助力机器人技术研究[D].合肥:中国科学技术大学,2007:34-35.
[2]傅 磊,戴冠中.网络控制系统研究综述[J].计算机工程与应用,2009,41(25):221-225.
[3]邓士普.网络环境下直流电机的时延补偿和控制 [D].杭州:浙江大学,2004:23-24.
[4]朱其新,胡寿松.网络控制系统的能控性和能观性[J].控制与决策,2010,9(19):157-161.
[5]唐 斌,章 云,刘国平,等.面向网络诱导时延和数据包丢失补偿的网络化广义预测控制[J].控制理论与应用,2010,27(7):45-46.
猜你喜欢
火力与指挥控制(2022年5期)2022-07-25
北京航空航天大学学报(2022年6期)2022-07-02
防爆电机(2022年3期)2022-06-17
防爆电机(2022年2期)2022-04-26
弹箭与制导学报(2020年1期)2020-07-09
中国电气工程学报(2019年21期)2019-10-21
弹箭与制导学报(2019年6期)2019-06-24
测控技术(2018年12期)2018-11-25
苏州市职业大学学报(2018年4期)2018-11-02
北京航空航天大学学报(2016年4期)2016-02-27
