一种复杂背景下非规则带状区域的分割算法
2012-09-25 07:37:24冯卫家解以扬贾惠珍
天津大学学报(自然科学与工程技术版) 2012年2期
王 萍,冯卫家,屈 展,解以扬,贾惠珍
作为图像识别的基础工作,对象的分割问题倍受学者和研究人员关注,并致力优质高效的分割效果.就传统的图像分割算法而言,幅度分割侧重图像的灰度等级,边缘分割侧重对象的边界方向;差影法分割则侧重运动着的对象等等,这些方法在应对复杂背景下非规则对象的分割问题时仍有一定的困难.
近年来,出现了一些解决较复杂问题的针对性的新型分割算法.Wang等[1]利用 MS-FCM 聚类算法,解决像素值相似但又分布于不同区域的像素点的分离问题,成功实现了胡子与胡须这种复杂背景下的嘴唇区域的提取.由 Kass等[2]提出的主动轮廓模型(Snakes)被广泛应用于非规则图像的分割及目标跟踪等方面.Ji等[3]设计的 loop-free snakes,以减小对初始轮廓的依赖、增大参数弹性等优点,实现对管状物、尖角、深凹/凸形状物的分割.Zoller等[4]则结合图像颜色和纹理特征分布以及基于概率形状的知识,制定贝叶斯框架,通过参数分布聚类实现受限于形状的图像分割.钟孟儿等[5]提出了一种复杂背景下直线或十字线型的目标物体的分离算法.王鹏等[6]通过探测窗法,解决光斑质心的自动查询.
在现有的成功算法中,还较少涉及复杂背景下不具有取值一致性的非规则带状区域的分割.
笔者的工作源于多普勒气象雷达探测到的云体反射率图像[7]的识别问题.通常情况下,有一种能够预示冰雹、暴雨等强风暴天气将要出现的天气条件,其在雷达回波图像上表现出一条弯延的若隐若现的带状区域,气象上称之为边界层辐合线[8](后文中简称辐合线).辐合线对气象灾害的预示能力使得对它的准确识别尤为关键;而辐合线反射率强度的不唯一性、形状的不确定性以及与背景反射率强度的相近性又对其识别形成巨大挑战.为此,笔者设计出“探测窗”协同“加深印象”算法,以解决该类复杂背景下非规则带状区域的分割问题.
1 边界层辐合线的图像特点
图 1左侧为一张含辐合线的雷达反射率的局部伪彩图像,右侧的各小图经过了人工处理,意欲增强其中的边界层辐合线的视觉示意效果.

图1 边界层辅合线反射率图像Fig.1 PBL convergent lines at a reflectivity picture
结合图1及专家经验,可归纳如下:
(1) 辐合线是一条可能带有岔路的弯延的带状区域;
(2) 同一时刻的一条辐合线上的反射率强度不尽相同,但多集中在 15、20、25、30、35,dBZ 这几个量级上;
(3) 辐合线上像素的反射率强度大于辐合线两侧像素的反射率强度;
(4) 背景中同时含有大量的与辐合线的反射率强度相同的区域.
2 局部带状区域检测
针对带状对象在形态上的非规则性和取值上的非唯一性的特点,本文采用从局部到整体的探测思路,探测窗就是实现这种思路的工具.
2.1 探测窗设计
局部探测的目的是首先弱化被检对象的复杂性,带状对象在几何结构上的非规则性是表现于宏观上的,随着观察范围的逐渐缩小,“带子”会逐渐变直,同时会排除开相近的干扰;二是虽然带状区域在反射率值上可能是非唯一的,但当观察范围缩小到一定程度后,反射率值会取得一致(反射率值变化处除外).
1) 探测窗形状
出于不限定被探测的带状对象局部走向的通用性考虑,将探测窗设计为方形(m×m).
2) 探测窗尺度
本文将“带状对象最粗的局部在窗内仍能呈现带状”的最小窗作为确定探测窗尺度的依据.实现方法如下.
设经统计运算得到被测对象局部最大宽度的均值Wμ和方差Wσ,则将局部最大宽度设定为

式中:int为取整运算;c可以取 1、2或 3,视专家经验和问题特点而定;0.5是为获得四舍五入的效果而加入的.探测窗尺度

按照式(1)和式(2),得到本文所需的局部辐合线探测窗尺度,如表1所示.

表1 局部辐合线探测窗尺度Tab.1 Size of local convergent lines detection window
2.2 局部带状区域探测算法
设探测窗探测到局部带状区域集合Ψ,Ψ= { ψi},其中的一部分组成辐合线区域Ω.
步骤 1 对像素点 p而言,若其反射率值R(p)∈RΩ,RΩ={ R1, … ,R5}={15,20,25,30,35}dBZ,则将探测窗滑动至以p点为中心的位置.
步骤 2 以 p为种子在探测窗内进行 8邻域区域生长[9],得到连通域 Zj,其间使用的一致性条件为生长点η的反射率值 R (η)≥Tr,Tr是反射率阈值,初值设为 R5.
步骤3 判断 Zj是否属于Ψ.
判断准则如下.设 Zj的面积为 Sj,探测窗被 Zj分割成N个连通域,那么
上述准则的物理意义在于局部带状区域的面积不能太大且一定将探测窗割裂为 2个以上的互不连通区.
如图 2所示, Z1和 Z2因同时满足判断准则的条件 1和条件 2而属于Ψ;Z3因不满足条件 1、Z4不满足条件2、Z5两个条件均不满足而均不属于Ψ.
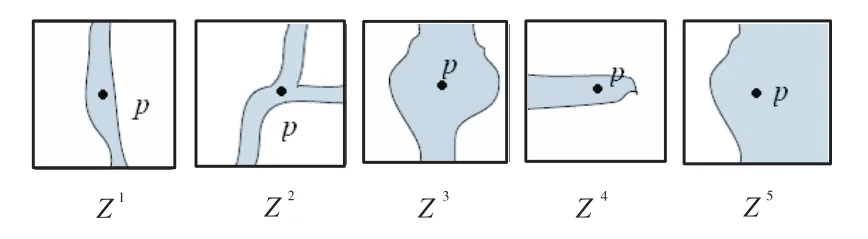
图2 用准则判断 Z j是否属于Ψ示意Fig.2 Sketch of principles to judge whether Z jbelongs toΨ
在判断准则下,进行操作如下.
若 Zj∈Ψ或Tr= R1,则在p点的探测结束;否则,若 Zj∉Ψ,Tr-5→Tr.
算法中,调整阈值 Tr的作用如下.
(1) 通过对 Tr由高到低的调整,尽量找出满足准则条件的 Zj.以图 3为例,图 3(a)为探测窗内的局部图像,图 3(b)、(c)、(d)依次为 Tr取初值(即Tr= R5= 3 5dBZ )、30dBZ、25dBZ时的探测情况,容易看出,待算法运行到第 3个循环,探测到带状区域,即 Zj∈Ψ.

图3 局部带状域判别示例Fig.3 Judgment of the local belt structure
(2) Tr由高到低的过程,保证使具有较高反射率值的ψi首先被找到.例如,图4(a)存在局部带状域,Tr= R5= 3 5dBZ 时,测到图 4(b)中的 Zb;Tr= R4= 3 0dBZ时,测到图 4(c)中的 Zc;而该算法探测到 Zb后,不再继续探测.
步骤4 依次扫描图像,得到所有局部带状区{}.iψ

图4 算法运行示例Fig.4 Results of the algorithms
3 加深“印象”处理及带状度检测
由局部探测的工作原理可知,图像中能够被探测到最短带的长度介于1~ 2倍的探测窗窗宽之间,因此,局部探测结束之后,得到的是一张携带许多短小带状区域的分割图像,这些短小的带状区域形成对真正较长的辐合线的干扰.
面对长的辐合线和短的干扰,窗探测的区别是“被多次探测到”还是“仅被 1次或少数几次探测到”,基于此,特别提出加深“印象”策略,以加大长短带之间的区分度.
3.1 加深“印象”策略
建立一个放置图像中各像素点“属于辐合线”印象的二维数组,探测伊始,各点印象值为 0,探测中,带状域的内点每被探到 1次便做一次“印象”累加.
3.2 加深“印象”的实施方案
首先,将加深“印象”策略嵌入局部探测过程中,即当用探测窗检出图像的局部带状区域iψ之后,增加如下工作.
(1)计算iψ中每一个像素q的局部印象值

式中 Wq为q处的带宽.设过q点沿水平、垂直方向的局部带状域的内点数分别为 Nx(q)和 Ny(q),则将 Wq估计为

Wq起到归一化的作用,用以使印象值主要反映长度信息.
融入以上加深“印象”策略的总探测结果会给出一个总体印象矩阵,将每个像素的印象值逐一与给定的阈值比较,大于阈值的像素点保留,否则舍去.
3.3 “印象”阈值的确定
设被检对象是一条等宽的长度为l的水平或垂直走向的理想带状区域,则不难推出,理想带上的最大印象值等于探测窗的窗宽m,而具有最大印象值的带状的长度

其余的印象值依次从 m −1减到1.
参照以上分析可以取“印象”阈值为m或m−1,例如设“印象”阈值为m,则会使短于2(m − 1 )的带状区域消失;使长于2(m − 1 )但短于2m的带子不再呈带状;使较短的带状区域的带状度减弱,而对较长带子影响不大,如图5(a)和(b)所示.
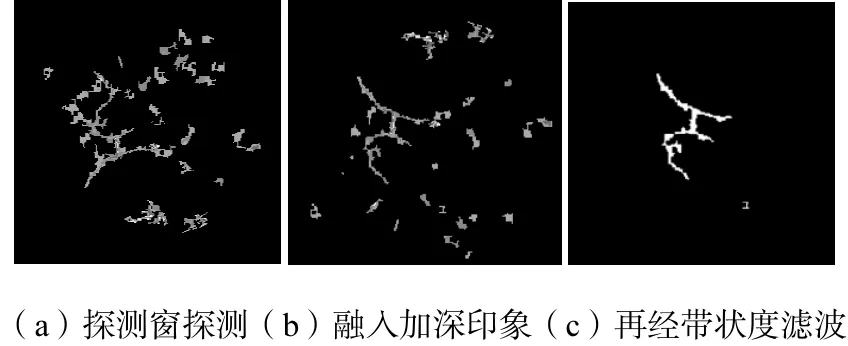
图5 探测结果示例Fig.5 Results of detection window
3.4 基于带状度的滤波
经过加深“印象”,无关的短带更短,其带状的程度退化.
一般地,在周长相同的条件下,带状区的面积远远小于其他形状的区域面积,因此,本文定义区域的带状度为

式中:ol是被考核区域外轮廓的周长;il是区域空洞的轮廓周长;S是区域面积;分子项的平方是出于使e成为无量纲量的考虑.
经分析,可以为e设定一个大于100的阈值eT,且只将大于该值的区域保留下来,图 5(c)是图 5(b)经此方案(取eT为135)滤波的效果.
4 测试结果
为提高辐合线的检测效果,局部探测之前,对图像做了适当的预处理,预处理工作包括将明显不是辐合线的小面积云团区域和显著风暴区域剔除、连通化处理[10-11]等.
按照第 2、3节提出的方案及算法,对天津地区含辐合线的 61张雷达反射率图像组织测试,测试结果如表2所示,由表2可知:
(1)有3条(3/61 4.92= %)辐合线未被检出,查其原因,发现这3条辐合线的反射值跳出了本文设定的RΩ的范围;
(2)SF和 ST分别为检出的无关区域和真实区域的面积.本文用 SF/(SF+ ST)来说明对辐合线区域的误警率.可以看出,本文方法仍有一定的辐合线区域的误警率.从行业知识可知,在水汽逐渐密集的区域,如果出现环境风的对吹或风速从快到慢的突然转变,就形成了产生辐合线的物理机制,经对 61个测试样本的人工观测发现,在被本文算法误报的区域中,90%以上没有这种物理机制相配合,这就是说,无关区域FS的进一步滤除可借助辐合线两侧风场的自动分析以及辐合线上水汽分布特点进行,这将是本文工作的延伸.

表2 测试结果Tab.2 Detecting results
5 结 论
(1)探测窗法使大尺度辐合线的分割问题降低到探测窗的尺度,从而降低了问题的复杂性.
由于探测窗的尺度较小,尽管大尺度下辐合线的带状结构千变万化,走向复杂,但其落在探测窗中的部分所表现出来的复杂性有限、区域特征相对稳定,可以克服辐合线不同位置的主要构成不同的问题,因此,探测窗可以在一定程度上稳定高效的分割形态各异的带状对象.
(2)加深“印象”法可以有助于将大尺度的带状区域保留、将短带区域滤除,增加了探测结果的鲁棒性.
(3)基于区域的带状度滤波方法,计算简单,工作稳定,在滤除无关区域中发挥着重要作用.
[1] Wang Shilin,Lau Wing-Hong,Liew Alan Wee-Chung,et al. Robust lip region segmentation for lip images with complex background[J]. Pattern Recognition,2007,40(12):3481-3491.
[2] Kass M,Witkin A,Terzopoulos D. Snakes:Active contour models[J]. International Journal of Computer Vision,1988,1(4):321-331.
[3] Ji Lilian,Yan Hong. Loop-free snakes for highly irregular object shapes[J]. Pattern Recognition Letters,2002,23(5):579-591.
[4] Zoller T,Buhmann J M. Shape constrained image segmentation by parametric distributional clustering[C]//Proceedings of the 2004 IEEE Computer Society Conference on Computer Vision and Pattern Recognition.Washington,DC,USA,2004:386-393.
[5] 钟孟儿,冯华君,裴锡宇,等. 在复杂背景下线状物体的图像分割算法研究[J]. 光学仪器,2005,27(1):52-56.
Zhong Menger,Feng Huajun,Pei Xiyu,et al. Segmentation of linear object from complex background[J].Optical Instruments,2005,27(1):52-56(in Chinese).
[6] 王 鹏,周 昕,王 勇,等. 哈特曼波前传感器光斑质心探测窗口的自动确定方法研究[J]. 激光杂志,2005,26(5):46-47.
Wang Peng,Zhou Xin,Wang Yong,et al. Study on an automatic selection method for spot centroid detection window of Harlsnan wavefront sensor[J]. Laser Journal,2005,26(5):46-47(in Chinese).
[7] 俞小鼎,姚秀萍,熊廷南,等. 多普勒天气雷达原理与业务应用[M]. 北京:气象出版社,2006.
Yu Xiaoding,Yao Xiuping,Xiong Tingnan,et al.Doppler Weather Radar Principles and Business Applications[M]. Beijing:Meteorological Press,2006(in Chinese).
[8] 张 群,张维桓,姜勇强.边界层辐合线发展成飑线的数值试验[J]. 气象科学,2001,21(3):308-315.
Zhang Qun,Zhang Weihuan,Jiang Yongqiang. Numerical trial of PBL convergence line developing to squall line [J]. Scientia Meteorologica Sinica,2001,21(3):308-315(in Chinese).
[9] Leila D,Khelil N,Mohamed B. Image segmentation by self-organized region growing[C]//Computer Information Systems and Industrial Management Applications.Ostrava,Czech,2008:171-176.
[10] 王 萍,董晓凯,贾惠珍. 基于雷达回波反射率图的雹云特征提取[J]. 天津大学学报,2007,40(10):1241-1246.
Wang Ping,Dong Xiaokai,Jia Huizhen. Hail cloud feature extraction based on radar reflectivity image[J].Journal of Tianjin University,2007,40(10):1241-1246(in Chinese).
[11] 贾永红. 计算机图像处理与分析[M]. 武汉:武汉大学出版社,2001.
Jia Yonghong. Computer Image Processing and Analysising[M]. Wuhan:Wuhan University Press,2001(in Chinese).
猜你喜欢
印制电路信息(2022年11期)2022-11-30 03:40:58
海洋通报(2022年4期)2022-10-10 07:40:26
光谱学与光谱分析(2022年4期)2022-04-06 03:44:38
内蒙古民族大学学报(社会科学版)(2020年2期)2020-11-06 09:08:52
制造技术与机床(2019年9期)2019-09-10 07:36:54
西南交通大学学报(2018年6期)2018-12-18 02:22:28
河北遥感(2017年2期)2017-08-07 14:49:00
电子器件(2017年2期)2017-04-25 08:58:37
太空探索(2016年5期)2016-07-12 15:17:55
衡阳师范学院学报(2016年3期)2016-07-10 07:16:27