四筒基平台拖航试验分析-水深影响研究
2012-09-25 07:37:30丁红岩乐丛欢刘宪庆刁景华
天津大学学报(自然科学与工程技术版) 2012年2期
丁红岩 ,乐丛欢 ,刘宪庆 ,刁景华
(1. 天津大学建筑工程学院,天津 300072;2. 天津大学滨海土木工程结构与安全教育部重点实验室,天津300072;3. 天津大学水利仿真与安全国家重点实验室,天津 300072;4. 海军工程大学(天津校区),天津 300450)
筒型基础海洋平台的拖航受力机理不同于普通的浮体(刚底平台或船舶).除了受到类似普通浮体的水弹性和浮体结构形状的影响外,还与封闭于筒内的气体弹性有关[1-3].目前对于筒型基础的研究主要集中在气浮稳性上[4-6],而对筒型基础在波浪作用下拖航的运动响应研究还相对较少,笔者采用模型试验的方法分析研究水深变化条件下筒型基础平台拖航的运动特性.
1 理论分析
(1) 在筒型基础海洋平台的拖航中,由于拖航水深的变化,计算时必须选用不同的波浪理论.当水深h大于波长L的 1/2时(如图 1(c)是深水波),波速只是波长的函数,与水深无关,水质点的垂直运动和水平运动相等;当水深小于波长的1/20时(如图1(a)是浅水波),波速只是水深的函数,与波长无关;当水深介于L/20~L/2时(如图1(b)是中等水深波),波速是波长和水深的函数[7].
(2) 对于圆柱形构件所受波浪力,按照其尺度大小的不同采取 2种不同的计算方法.对于小直径构件,当构件的直径和波长的比值相对很小( D/L ≤ 0 .15)时,采用半经验半理论的 Morison公式;对于大直径构件,采用 MacCamy和 Fuchs提出的绕射理论[8].
(3) 筒型基础结构尺寸相对于波浪来说是小尺寸构件,计算时采用 Morison公式.波浪对结构单筒的作用形式如图2所示.
当入射波由x轴的正向传来时,在厚度为 dz的圆柱形切片上受到沿x轴方向的波浪扰动力为

式中:u为切片处未扰动的波浪中流体质点的速度;CM为质量系数;Cd为阻力系数.对于圆形剖面的柱体,由文献[9]可知,CM= 2 .0,Cd= 1 .0.

图1 水质点随深度的运动Fig.1 Movement with the changes of depth
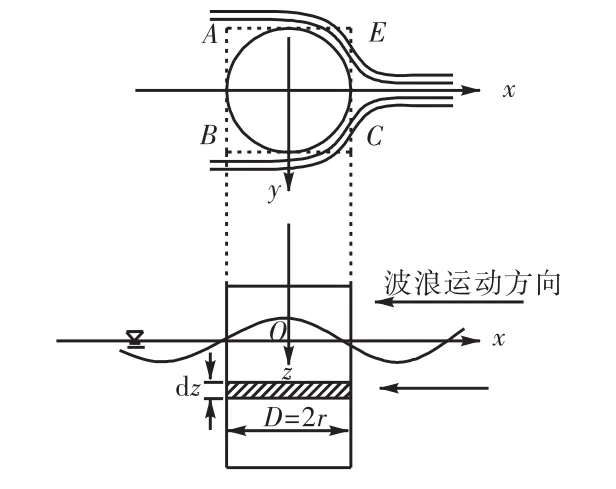
图2 筒体波浪作用示意Fig.2 Affection of wave on the bucket
(4) 由于结构并非单体,必须考虑4个柱体组成的浮体在流体力学方面的相互干扰情况[10].如图 3所示,对按方阵布置的4个圆柱进行波浪中的相互作用问题研究,圆柱半径 r和水深的比为 3/10,方阵边长S和水深的比值为9/10.图4为当筒型基础下沉入土时,波浪入射角 α=45º时,不同波数( 2/k L= π )下桩群各桩上所受的波浪力F与孤立单桩上的受力0F之比,波浪按照这一角度入射时,桩群中各柱上的波浪力可达到单柱上波浪力的 1.7倍.所以,波浪与桩群作用时,由于桩柱之间的干涉影响,最大波浪力有可能增加.
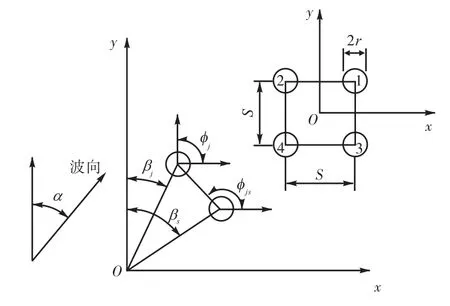
图3 坐标系和圆柱位置示意Fig.3 Coordinate system and location of cylinders

图4 波浪扰动力Fig.4 Wave exciting forces of surge
2 试 验
2.1 试验模型
试验以海军某平台为原型,采用1∶20比例钢质结构模型(原型平台筒直径 6.0,m,筒高 7.0,m,平台整体高度 22,m),如图 5所示.试验模型按重力和傅汝德相似定律进行相似比设计,为使平台模型的重量分布与平台原型相应地缩小,根据平台的重量分布,模型配有一定重量的压载以模拟平台上的设备重量,整体模型入水见图6.

图5 1∶20模型Fig.5 Model 1∶20

图6 拖航模型入水Fig.6 Model of towing in water
2.2 设计方法
试验用多因素正交设计方法,利用正交组合表来安排试验组合,对单因素的水平情况考虑3个组合[11].根据试验条件和现场条件,在波浪条件、拖航速度等不变的前提下,水深分别为10,m、15,m和20,m时筒型基础平台运动特性分析的组合情况如表1所示.

表1 拖航组合Tal.1 Combinations of towing
2.3 传感器布置
试验中采用拉力、压力(包括气压力和水压力传感器)和加速度传感器,传感器布置如图 7所示.拉力传感器固定于拖车上,作用点处安装有滑轮,拖缆绕过滑轮将结构模型与拉力传感器连接;气压力传感器布置在筒内顶部;水压力传感器布置于筒底;加速度传感器固定于平台顶部中间位置.在拖航过程中,x、y和 z方向分别为纵荡、横荡和垂荡方向,筒体编号见图 8,1、3筒在前,2、4筒拖航.
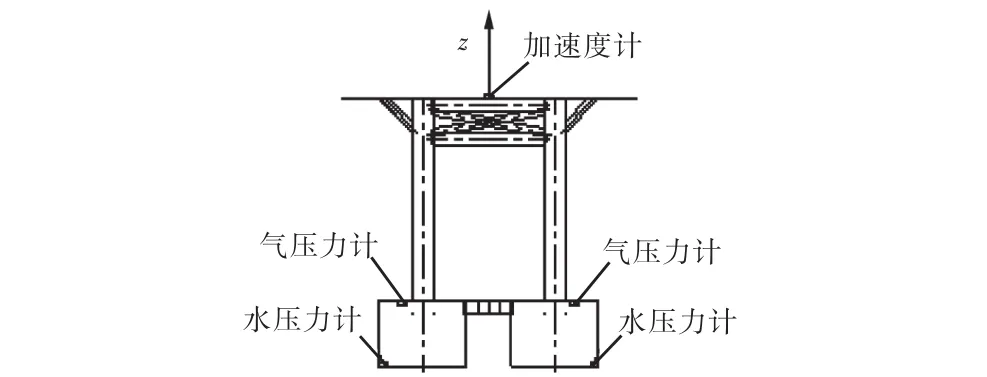
图7 结构立面及传感器布置Fig.7 Vertical structure and layout of sensors

图8 筒体编号Fig.8 Numbers of cylinders
3 试验结果分析
本次试验中加速度数据由DAQ数据采集软件获得,气压、水压以及拖缆张力通过数据采集系统获得,数据处理采用 Origin和 Matlab软件滤波相互结合的方法进行处理分析[12-13].为了更好地分析试验现象,取拖航稳定阶段的参数变化曲线进行研究.
由图8可见,结构是左右前后对称的,故1筒和3筒的变化规律、2筒和 4筒的变化规律是大体一致的,实际中选择1筒和4筒的数据进行分析.
对于试验中规则波浪,波周期为 6,s,波高为2.0,m,波长采用迭代方法求出,求解结果见表 2,可以看出,该波浪为中等深水波.

表2 不同水深波长Tab.2 Wave length with different water depths
3.1 随浪分析
从图9可知,当拖航水深从10,m变化到20,m,1和3系缆筒的筒底水压力值是按照正弦曲线规律随水深的增加而增加,且变化的幅度随拖航水深的变大而减小,原因是在中等水深波下,波长和水深成正比,水深增加波长变长,波速增加,结构摇摆运动变大.
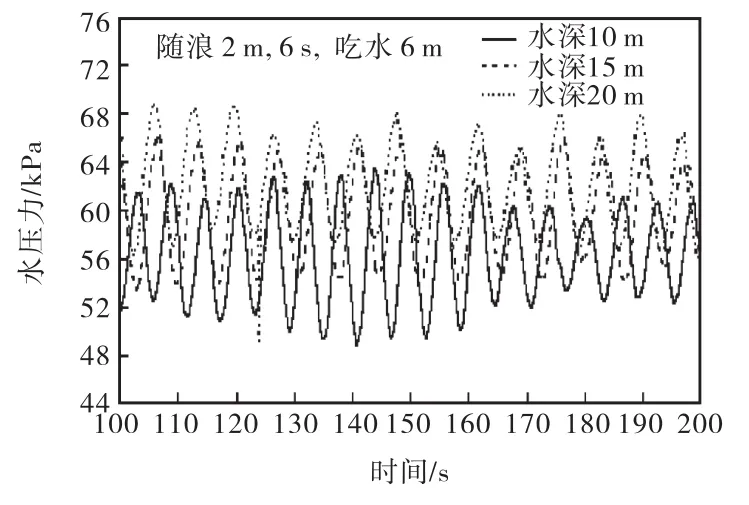
图9 1筒水压力Fig.9 Water pressure of bucket 1
从图10可见,筒内气压力的变化趋势和图9中水压力的变化是基本一致的,这与筒基的运动受力机理是相符的.因为筒型基础拖航时,主要依靠筒内气垫和筒内水塞来维持拖航的稳性,当筒底水压力变大即筒下沉、筒外水进入筒底,筒内水塞高度变大,水塞压缩筒内空气来完成结构的支撑,筒内气体压力变大,当筒上浮,筒内水从筒底流出,筒内水塞高度减小,气体体积变大,筒内气压力变小.
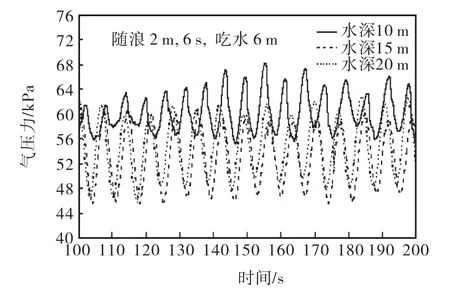
图10 1筒气压力Fig.10 Air pressure of bucket 1
图11 和图12为随浪拖航中4非系缆筒稳定阶段的筒底水压力和筒内水压力变化时程曲线.不难看出,随着拖航水深从 10,m 变化到 20,m,筒底水压力值和气压力值随着水深的变大而变小,水压力和气压力变化幅度却呈增大趋势,原因在于,在水深增大时,结构的垂荡运动变小,进入筒内的水也变少,水压力值也就小;对比图 9系缆筒内水压力的变化,在相同的时刻,当摇摆运动到系缆筒时,系缆筒下沉,筒底水压变大,内部空气压缩,气压变大;非系缆筒上浮,筒底水压变小,筒内气压相应变小,可以很好地解释幅度的变化.
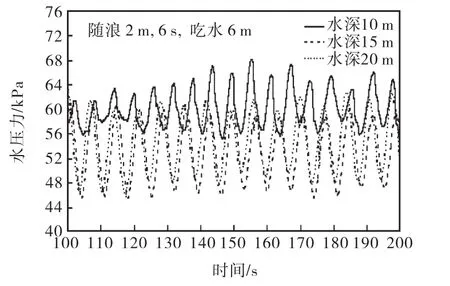
图11 4筒水压力Fig.11 Water pressure of bucket 4
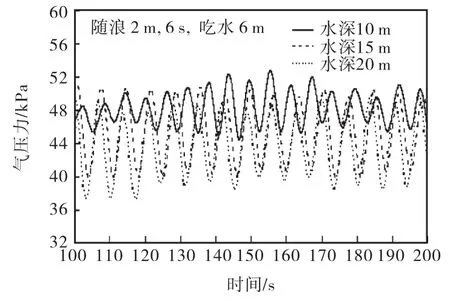
图12 4筒气压力Fig.12 Air pressure of bucket 4
图13 为随浪拖航中,水深变化情况下拖缆力的时程变化曲线.由图13中可见,随着水深的增加,拖缆力脉冲变化的幅度和拖缆力的大小都是减小的.原因在于,水深增加,波浪速度变大,波浪能够很好地作用在筒基上;且从图可以得到,拖缆力在水深 10,m、15,m和20,m时的一个脉冲时间分别为13,s、7,s、6,s,也证明了波速增加,推动结构运动,拖缆一直处于拖拽状态的时间变长,拖缆的悬垂度降低.在实际的拖航中,水深变大的情况下,必须加长缆绳来设置一定悬垂度,防止涌浪的冲击对缆绳耐久性造成 破坏.
图14~16为随浪拖航各项加速度的时程变化曲线.由图 14和图 16可见,在拖航航速一定的情况下,水深增加,x和 z方向即纵荡和垂荡方向加速度变化的值和幅度呈下降的趋势;且x方向加速度的幅值在水深 10,m、15,m、20,m 时分别是 0.083,m/s2、0.062,m/s2和 0.059,m/s2,z方向加速度的幅值分别为0.086,m/s2、0.082,m/s2和 0.071,m/s2,2 个方向加速度的最大降幅为25.3%.从图15可以看出,稳定阶段横荡加速度随着水深的增加而增加,y方向加速度的幅值在水深 10,m、15,m、20,m 时分别为 0.068,m/s2、0.046,m/s2和0.149,m/s2,最大增幅为224%,说明随着水深的增加,在垂荡和纵荡方向上运动变化不明显,在拖航平面内的横荡变化明显.这是因为水深增加,波浪很好地作用在结构上,拖车拖缆处于拉直状态时间变长,在横荡方向没有防止飘移措施,所以导致图示飘移明显,呈现周期性的幅度较大的漂移,影响平台的可操纵性.

图13 拖缆力Fig.13 Tension

图14 x方向加速度Fig.14 Acceleration in x direction
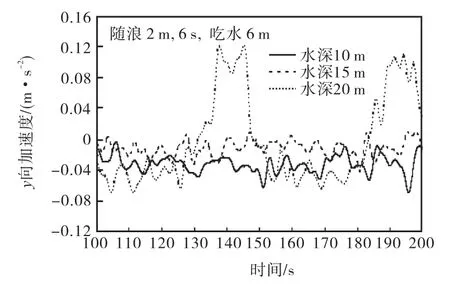
图15 y方向加速度Fig.15 Acceleration in y direction
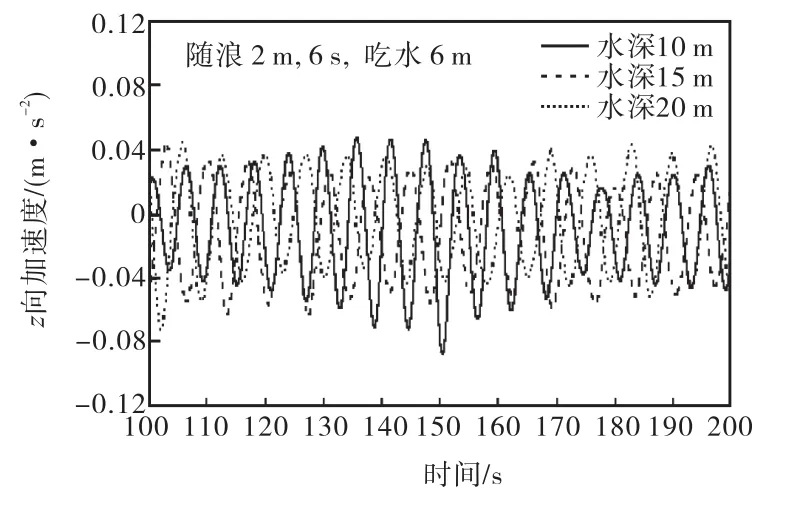
图16 z方向加速度Fig.16 Acceleration in z direction
3.2 顶浪分析
图17 为不同水深情况下随浪拖航时1系缆筒和4非系缆筒的加速度和拖缆力时程曲线.相比随浪拖航,随着水深的变化,顶浪拖航时由于波浪持续稳定地作用在各个筒上,各方向的加速度也变化明显,拖航方向即x方向的加速度变化稳定,而在纵荡方向稳定阶段的加速度随着水深的变化先增加后降低,且幅值大于随浪拖航时y方向的加速度;且从z方向的加速度可以看出,在 15,m 以下的水深中顶浪拖航,垂荡是稳定的,而在 15,m 以上的水深顶浪拖航时,垂荡加速度变化幅度大,原因是逆浪拖航试验的稳定阶段中,平台在拖航中出现倾倒现象,需要施加外部约束扶持才能保证正常的航行,平台不能在 20,m 的逆浪图示组合下拖航.
由图 18(a)和(b)可知,顶浪拖航时,随着水深增加,虽然波浪的速度变大,但是由于顶浪拖航时无论水深如何变化波浪都能稳定持续地作用在各筒上,所以 1、3系缆筒和 2、4非系缆筒的变化幅度都不大,最大的压力变化发生在 4筒水深由 10,m变化到15,m深的过程中,仅为2.01,kPa.由图18(c)可见,随着水深的增大,x方向的加速度幅值先减小后增大,且水深从10,m变化到15,m时,降幅为11%,而水深从 15,m增大到 20,m的过程中,增幅为 59%;y方向的加速度幅值呈上升趋势,增幅依次为 24%和 20%;而垂荡的 z方向变化很不稳定,水深从 10,m到15,m,降幅为57.5%,从15,m变化到20,m时,增幅为339%,所以水深的变化对于结构的垂荡运动影响特别明显.从图18(d)可知,随着水深的增加,拖缆力近似呈线性降低,且水深每增加 5,m,拖缆力平均降幅为40%,降幅较大.
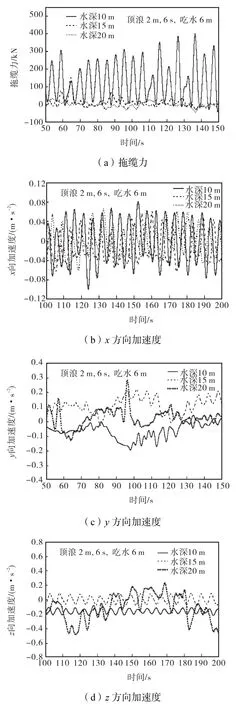
图17 水深不同时随浪拖航测试指标Fig.17 Test index with different water depths in following waves towing
3.3 随浪拖航和顶浪拖航的对比分析
对比分析水深从10,m变化到20,m的试验结果,就加速度而言,随浪拖航时,x、y、z方向的最大加速度分别为 0.083,m/s2、0.149,m/s2和 0.086,m/s2,顶浪拖航时x、y和z方向的最大加速度值依次为0.140,m/s2、0.287,m/s2和 0.431,m/s2,说明随浪拖航的摇摆运动和升沉运动的幅度低于顶浪拖航的幅度,且在试验过程中,在15,m和20,m的水深中拖航的速度分别不能超过1.5节和1.2节,否则将造成平台的倾覆;从拖缆力来看,水深每增加5,m,随浪拖航时拖缆力最大降幅为74%,顶浪拖航时降幅为60%,虽然拖缆力都显著降低,但是平台的平面漂移运动明显,尤其是顶浪拖航过程中的埋首现象,平台的稳定性和操纵性都下降.
4 结 论

图18 不同水深时顶浪拖航测试指标Fig.18 Test index with different water depths in head waves towing
(1) 平台由浅水进入深水时,在波高和波周期一定的前提下,波浪的波长变长,波速变大,筒型基础的稳定性降低,平面漂移现象严重,操纵性能降低;
(2) 平台下各筒的筒内气压力和筒底部水压力的变化是一致的,当筒下沉时,筒底水压力变大,筒内气体受压,筒内气压力变大;
(3) 水深变化下,随浪拖航的加速度、压力以及拖缆力的幅值都小于顶浪拖航;
(4) 该结构在波高2,m,波周期6,s,水深为10,m的拖航可以保持自身的稳定性和操纵性,在水深超过10,m时需要降低拖航速度来保持结构的稳定性.
[1] Pinkster J A,Scholte E M. The behavior of a large airsupported MOB at sea[J]. Marine Structures,2001,14(1/2):163-179.
[2] Malenica S,Zalar M. An alternative method for linear hydrodynamics of air cushion supported floating bodies[C]//15th International Workshop on Water Waves and Floating Bodies. Dan Caesarea,Israel,2000.
[3] Thiagarajan K P,Morris-Thomas M T. Wave-induced motions of an air cushion structure in shallow water[J].Ocean Engineering,2006,33(8/9):1143-1160.
[4] 别社安,时忠民,王翎羽. 气浮结构的静浮态分析[J]. 中国港湾建设,2000(6):18-23.
Bie She’an,Shi Zhongmin,Wang Lingyu. Analysis of the static stability of the air-floating structure[J]. China Harbor Construction,2000(6):18-23(in Chinese).
[5] 别社安,时忠民,王翎羽. 气浮结构的小倾角浮稳性分析[J]. 中国港湾建设,2001(1):31-35.Bie She’an,Shi Zhongmin,Wang Lingyu. Analysis of the small angle stability of the air-floating structure[J].China Harbor Construction,2001(1):31-35(in Chinese).
[6] 别社安,时忠民,王翎羽. 气浮结构的运动特性研究[J]. 中国港湾建设,2001(2):18-21.
Bie She’an,Shi Zhongmin,Wang Lingyu. Research on moving characteristics of air-floating structure[J]. China Harbor Construction,2001(2):18-21(in Chinese).
[7] 李远林. 近海结构动力学[M]. 广州:华南理工大学出版社,1999.
Li Yuanlin. Dynamics of Offshore Structures[M]. Guangzhou:South China University of Technology Press,1999(in Chinese).
[8] 苏兴翘. 船舶与海洋构造物动力学[M]. 天津:天津大学出版社,1992.
Su Xingqiao. Dynamics of Ship and Marine Installations[M]. Tianjin:Tianjin University Press,1992(in Chinese).
[9] 潘 斌. 移动式平台设计[M]. 上海:上海交通大学出版社,1995.
Pan Bin. Design of Mobile Platform [M]. Shanghai:Shanghai Jiao Tong University Press,1995(in Chinese).
[10] R 巴塔查雅. 海洋运载工具动力学[M]. 北京:海洋出版社,1982.
Bhattacharyya R. Dynamics of Marine Vehicles[M]. Beijing:Ocean Press,1982(in Chinese).
[11] 李忠献. 工程结构试验理论与技术[M]. 天津:天津大学出版社,2004.
Li Zhongxian. Test Technology and Theory of Engineering Structures[M]. Tianjin:Tianjin University Press,2004(in Chinese).
[12] 肖 信. ORIGIN8. 0实用教程:科技作图与数据分析[M]. 北京:中国电力出版社,2009.
Xiao Xin. ORIGIN8. 0 Practical Tutorial:Technology Drawing and Data Analysis[M]. Beijing:China Power Press,2009(in Chinese).
[13] 王 彬. Matlab-数字信号处理[M]. 北京:机械工业出版社,2010.
Wang Bin. Matlab-Digital Signal Processing[M]. Beijing:China Machine Press,2010(in Chinese).
猜你喜欢
河北水利(2022年10期)2022-12-29 11:48:12
海洋通报(2022年4期)2022-10-10 07:40:32
水道港口(2022年1期)2022-05-18 13:01:20
世界海运(2021年9期)2021-10-08 06:49:30
兵工学报(2019年7期)2019-08-28 01:34:34
船海工程(2018年5期)2018-11-01 09:15:16
船海工程(2018年1期)2018-03-01 02:47:04
浙江国土资源(2015年4期)2015-05-09 08:43:59
船海工程(2014年4期)2014-06-27 01:02:50
机械制造与自动化(2014年1期)2014-03-01 04:22:04