具有Holling II类功能反应的3种群食物链模型稳定性
2012-09-18 02:19:32闫莎
重庆理工大学学报(自然科学) 2012年4期
闫 莎
(安康学院 数学系,陕西安康 725000)
讨论3种群食物链模型[1]
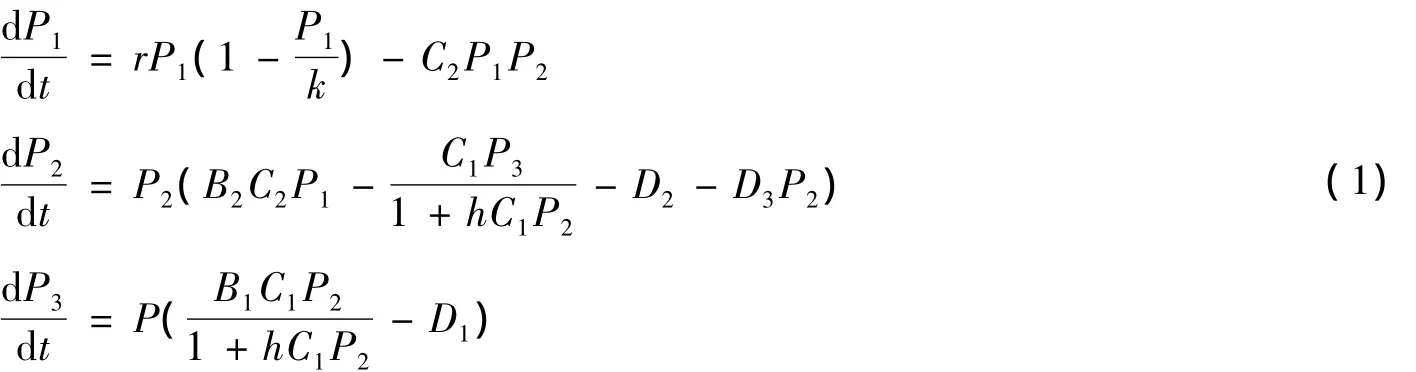
解的一致有界性和正平衡点的稳定性。式(1)中:P1、P2、P3分别表示食饵、捕食者和最高捕食者种群的密度;是Holling II型功能反应函数;P2自身具有密度制约;B1、B2是捕食者P3、P2的转化率;h是捕食者P3的消化系数;D1、D2是捕食者P3、P2的死亡率;D3是捕食者P2的密度制约系数;C1、C2是捕食者P3、P2的捕食率;r和k分别是食饵 N的内禀增长率和环境容纳量。详细的生态意义见文献[1-3]。

本文主要采用文献[4]的思想,应用线性化方法和Lyapunov函数方法讨论模型(2)的正平衡点的稳定性。
1 一致有界性
经简单计算知,式(2)至少有平凡平衡点(0,0,0)和半平凡平衡点(1,0,0);至多有一个正平衡点,其存在的充要条件是

定理1 设(u1(t),u2(t),u3(t))是系统(2)取正初值 $(u1(0),u2(0),u3(0))时的解,其中[0,T)是解最大存在区间,则存在依赖于式(2)的系数以及初值ui(0)(i=1,2,3)的正常数M,使得0≤ui(t)≤M(i=1,2,3),进一步有 T=+ ∞。
证明 设(u1(t),u2(t),u3(t))是问题(2)在初值 ui(0)≥0(i=1,2,3)时的解,由比较原理[5]易知,当 t∈[0,T)时,(u1(t),u2(t),u3(t))≥0。
下面证明(u1(t),u2(t),u3(t))在[0,T)上是有界的。对式(2)的第1个方程应用比较原理得
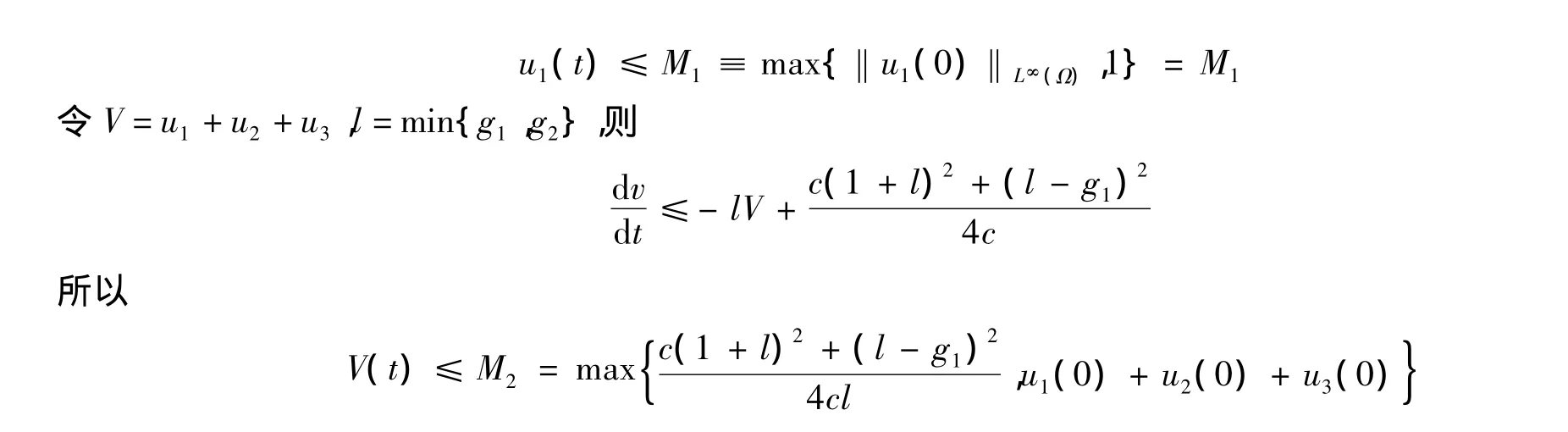
因此,对∀t∈[0,∞),有 ui(t)≤M(i=1,2,3)。由延拓定理得 T=+∞。
2 局部渐近稳定
系统(2)在E*处的线性化矩阵为
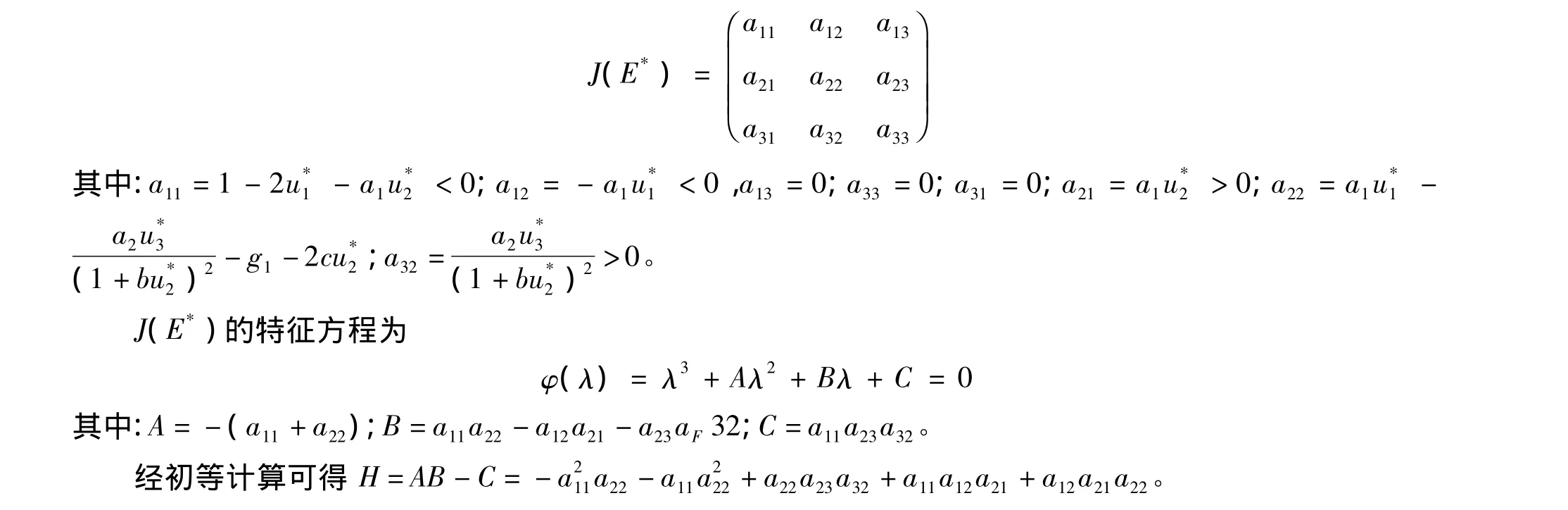
要使 φ(λ)的3 个根 λ1、λ2、λ3均有负实部,必有A >0,C >0,H >0,即 a11、a22均为负。注意到 a11<0成立,而a22<0的充要条件是

于是,由文献[6]定理5.5.1可得如下结论:
定理2 若条件(H1)、(H2)成立,则问题(2)的正平衡点局部渐近稳定。
3 全局渐近稳定性
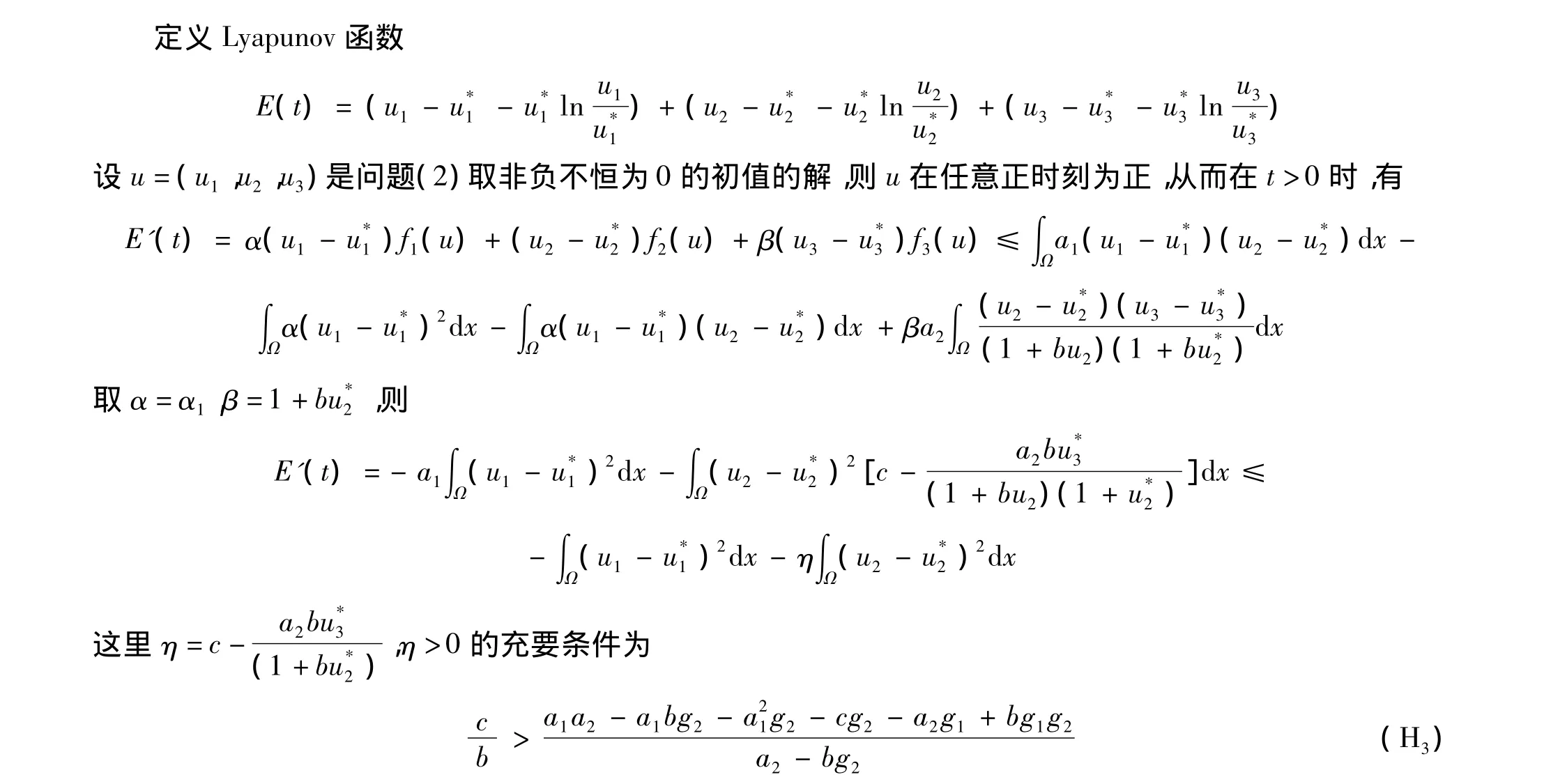
由Lyapunov-Lasalle不变原理[7],再结合E*得局部渐近性,从而可得E*是全局渐近稳定的,即:
定理3 若条件(H1)、(H2)、(H3)成立,则问题(2)的正平衡点E*全局渐近稳定。
[1]Armstrong R A,McGehee R.Competitive exclution[J].Am Nature,1980,115:151-170.
[2]陈兰荪.数学生态学模型与研究方法[M].北京:科学出版社,1988.
[3]Abrams A,Brassil E,Holt D.Dynamics and responses to mortality rates of competing predators undergoing predator-prey cycles[J].Theoretical Population Biology,2003,64:163-176.
[4]Xin-an Zhang,Lansun Chen,Avidan U N.The stage-structured predator-prey model and optimal harvesting policy[J].Mathematial biosciences,2000,168:201-210.
[5]叶其孝,李正元.反应扩散方程引论[M].北京:科学出版社,1999.
[6]May R M.Stability and Complexity in Model Ecosystems[M].[S.l.]:Princeton University Press N J,1974.
[7]Hale J K.Ordinary Differential Equations[M].[S.l.]:Krieger Malabar F L,1980.
猜你喜欢
数学物理学报(2022年1期)2022-03-16 06:15:04
云南大学学报(自然科学版)(2021年1期)2021-02-05 08:04:04
空间科学学报(2020年1期)2021-01-14 00:53:28
中等数学(2020年2期)2020-08-24 07:58:46
数学年刊A辑(中文版)(2018年2期)2019-01-08 01:59:46
测控技术(2018年9期)2018-11-25 07:44:24
太原师范学院学报(自然科学版)(2018年2期)2018-08-17 12:21:50
东华大学学报(自然科学版)(2018年1期)2018-06-29 03:35:24
北京航空航天大学学报(2016年7期)2016-11-16 01:50:55
光学精密工程(2016年3期)2016-11-07 09:03:32