自反矩阵下矩阵方程AXB+CXD=E的最佳逼近解
2012-09-18 02:19:28孙合明李庆芳杨家稳
重庆理工大学学报(自然科学) 2012年4期
孙合明,李庆芳,杨家稳
(1.河海大学理学院,南京 210098;2.滁州职业技术学院,江苏滁州 239000)
首先介绍本文中的一些符号。Rm×n表示m×n阶矩阵的集合。I表示单位矩阵。AT表示矩阵A的转置矩阵。对于矩阵A,B∈Rm×n,A⊗B表示A与B的Kronecker积,〈A,B〉=trace(BTA)定义为它们的内。‖A‖表示矩阵A的Frobenius范数,即‖A‖2=〈A,A〉。vec(·)是矩阵A=(aij) ∈Rm×n的拉伸算子,定义为

矩阵P若满足PT=P和P2=I,则称P是反射矩阵。对反射矩阵P∈Rm×m和Q∈Rn×n,若有A=PAQ,则称矩阵A∈Rm×n是关于(P,Q)的广义自反矩阵,并把所有 m×n阶(P,Q)广义自反矩阵的全体表示为(P,Q)。
本文主要考虑如下问题:
问题 1 对于给定的实矩阵 A,C∈Rs×m,B,D∈Rn×t,E∈Rs×t,求 X∈(P,Q),使得

问题2 设问题1的解集合为SE,对于给定(P,Q),求,使得

矩阵方程在控制和通信理论有着重要作用,在计算数学方面也是一个非常活跃的研究专题。问题2来源于常见的实验设计,这里矩阵X*可由实验获得,它可能不是矩阵方程AXB+CXD=E的解。
文献[1-2]提出了几种解决矩阵方程AX+XB=C的方法。文献[3]给出了矩阵方程AXAT+BXBT=C的对称解。在矩阵方程ATXB+BTXTA=D相容的情况下,文献[4]给出了它的极小范数解。在矩阵方程ATXB+BTXTA=D不相容的情况下,文献[5]给出了求解给定矩阵最佳逼近解的一种算法,文献[6-7]分别给出了其最小二乘解和极小范数最小二乘解。文献[8]给出了求解矩阵方程AXB+CXTD=E极小范数最小二乘解的迭代方法。文献[9]给出了矩阵方程AXB+CXD=F相容情况下的中心对称最佳逼进解。关于反射矩阵P的自反(反自反)矩阵在系统和控制理论、工程、科学计算等多个领域都有广泛的应用[10-11]。目前,已有越来越多的学者致力于研究矩阵方程的自反(反自反)最佳逼近解[12-13],但是还没有文献涉及求解矩阵方程AXB+CXD=E的自反(反自反)最佳逼近解。
本文在线性系统解集标准正交基的基础上,给出了集合SE的表示形式,继而在集合SE中给出问题2的最佳逼近解的表达式,最后通过2个数值实例验证该算法的有效性。
1 问题1和问题2的解
本节利用矩阵零空间的标准正交基,给出问题1和问题2解的表达方式。
问题1是一般的约束优化问题,由于给定的目标函数和约束函数的特殊性,可以给出问题1解的表达方式。
定理 1 X=PXQ 等价于 vec(X)=B1x,其中 B1=(ξ1,…,ξr),x=(x1,x2,…,xr)T,ξ1,ξ2,…,ξr是矩阵(QT⊗P-I)零空间的标准正交基。
证明 由自反矩阵的定义有

设ξ1,…,ξr是矩阵(QT⊗P-I)零空间的标准正交基,则式(5)的任意解vec(X)可以表示为故得式(6)。


定理 3 问题 1 的最优解可以表述成 vec(X)=B1B2y+t,其中 y=(y1,y2,...,ys)T,B2=(η1,…,ηs),t=B1T,η1,…,ηs是矩阵A'B1零空间的标准正交基,T 是方程A'B1x=b'的一个特解,B1,A',c'如定理1和定理2所述。
证明 将vec(X)=B1x代入ψ(vec(X))=‖AXB+CXD-E‖2,得到
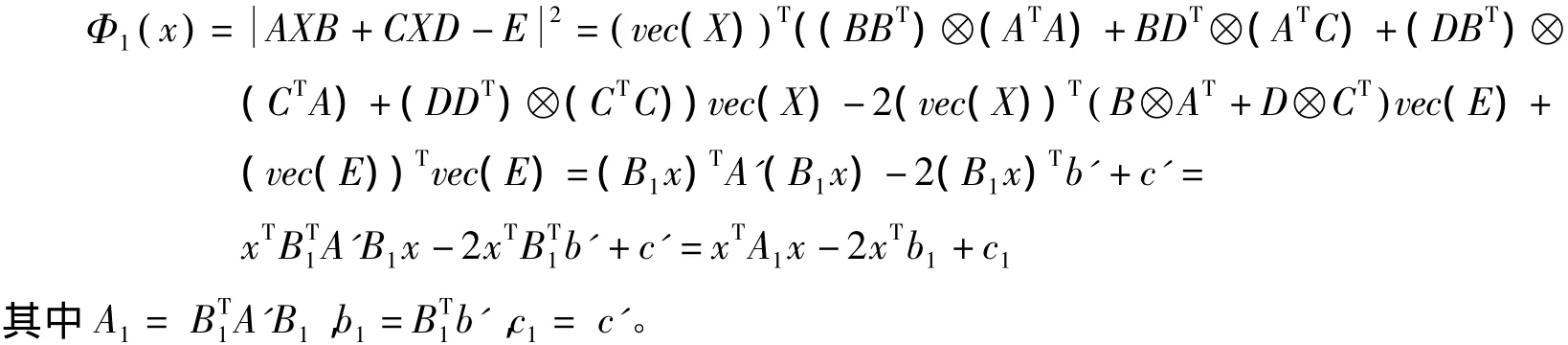
要使Φ1(x)取得极值,必有▽Φ1(x)=2A1x-2b1=0,得A1x=b1。设η1,…,ηs是矩阵A1零空间的标准正交基,T 是 A1x=b1的一个特解,则 x=(η1,…,ηs)(y1,…,ys)T+T=B2y+T,其中 y=(y1,y2,…,ys)T,B2=(η1,…,ηs),则问题1的最优解可以表述为 vec(X)=B1x=B1(B2y+T)=B1B2y+t,其中t=B1T。
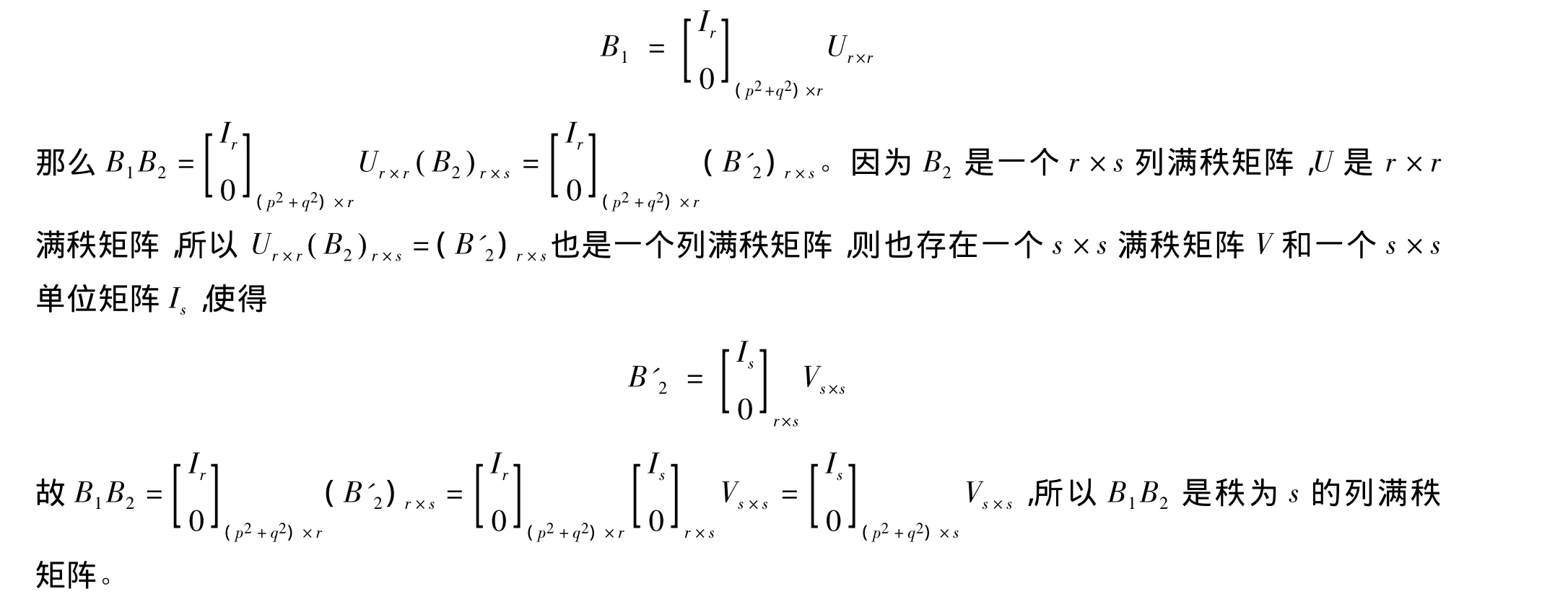
定理4 设B1,B2分别是定理1和定理3中的列满秩矩阵,则B1B2是列满秩矩阵。
证明 B1是(p2+q2)×r列满秩矩阵,则必存在一个r×r的满秩矩阵U和一个r×r的单位矩阵Ir,
使得
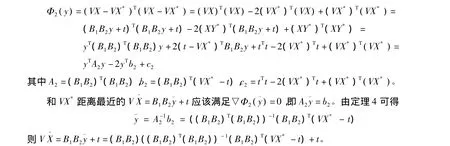
定理5 设VX*=vec(X*),其中X*是给定的矩阵,则问题2的解为

其中B1、B2、t分别如定理1和定理3所述。
证明 根据定理3,问题1的最优解为VX=vec(X)=B1B2y+t。设
注释1
2)对于问题1和问题2,如果限制矩阵X和Y属于反自反矩阵集合,那么通过类似的方法可以求得它的反自反最佳逼近解。
2 数值测试
选取2个实例来验证本文的算法。试验均在Matlab 2007R上进行。
例1 考虑方程AXB+CXD=E,其中


可以证明上述方程是相容的,有唯一自反矩阵解

应用式(7),可以直接得到如下解:

相应的误差R=‖A X^B+C X^D-E‖=5.070248950780553e-012。例1有力地说明了本文所给解的表达式的正确性。

3 结束语
本文借助于矩阵零空间的标准正交基,首先给出约束条件的解的一般表达式,继而得到问题1的解的表达式。根据函数取得极值的必要条件,最后得出问题2的最佳逼进解的表达式。该表达式简单明了,无需迭代即可直接计算出结果。对任意给定的矩阵,无论矩阵方程是否相容,运用本文给出的解的表达式都可以求出方程AXB+CXD=E的最佳逼近解。本文给出的2个数值实例有力地证明了该表达式的有效性。
[1]Richard H B,Stewart G W.Solution of the Matrix Equation AX+XB=C(Algorithm 432)[J].Commun ACM,1972,22:820-826.
[2]Golub G H,Nash S,Van Loan C.A Hessenberg-Schur method for the problem AX+XB=C[J].IEEE Trans Automat Control AC,1979,24:909-913.
[3]Chang X W,Wang J S.The symmetric solution of the matrix quations,AXAT+BXBT=C and(ATXA,BTXB )=(C,D)[J].Linear Algebra Appl,2000,311:67-78.
[4]袁永新.两类矩阵方程的极小范数解[J].高等学校计算数学学报,2006,24(2):127-134.
[5]盛兴平,苏友峰,陈果良.矩阵方程ATXB+BTXTA=D的极小范数最小二乘解的迭代算法[J].高等学校计算数学学报,2008,30(4):352-362.
[6]袁永新.矩阵方程的最小二乘解[J].高等学校计算数学学报,2001,23(4):324-329.
[7]袁永新,戴华.矩阵方程ATXB+BTXTA=D的极小范数最小二乘解[J].高等学校计算数学学报,2005,27(3):232-238.
[8]Minghui Wang,Xuehan Cheng,Musheng Wei.Iterative algorithms for solving the matrix equation AXB+CXTD=E[J].Applied Mathematics and Computation,2007,187:622-629.
[9]刘大瑾,周海林,袁东锦.AXB+CXD=F的中心对称解及其最佳逼近的迭代算法[J].扬州大学学报,2008,11(3):9-13.
[10]Chen H C.Generalized reflexive matrices:special properties and applications[J].SIAMJ MatrixAnal Appl,1998,19:140-153.
[11]Chen H C,Sameh A.Numerical linear algebra algorithms on the cedar system[C]//Parallel Computations and their Impact on Mechanics,AMD.[S.l.]:The American Society of Mechanical Engineers,1987:101-125.
[12]Xiang-yang Peng,Xi-yan Hu,Lei Zhang.The reflective and anti-reflective solutions of the matrix equations AHXB=C[J].Journal of Computational and Mathematics,2007,200:749-760.
[13]Zhen-yun Peng,Xi-yan Hu.The reflective and anti-reflective solutions of the matrix equation AX=C[J].Linear Algebra and Appl,2003,375:147-155.
猜你喜欢
数学物理学报(2020年2期)2020-06-02 11:29:10
安顺学院学报(2020年1期)2020-04-05 10:57:20
泰山学院学报(2019年6期)2020-01-14 02:34:34
现代计算机(2019年6期)2019-04-08 00:46:50
中国校外教育(下旬)(2017年8期)2017-10-30 17:32:36
数学物理学报(2017年3期)2017-07-01 16:18:48
天津商务职业学院学报(2015年2期)2015-02-28 16:47:22
天津商务职业学院学报(2015年1期)2015-02-28 16:47:12
数学年刊A辑(中文版)(2014年1期)2014-10-30 01:48:06
深空探测学报(2014年1期)2014-02-28 15:06:04