
基于遗传算法的BP神经网络在电站锅炉主蒸汽温度控制系统中的应用研究
2012-07-28 09:53:22颜海斌杨建华张润盘
应用能源技术 2012年6期
许 琴,颜海斌,杨建华,张润盘
(1.中材节能股份有限公司技术部 天津 300400;2.浙能中煤舟山煤电有限责任公司发电部 浙江 舟山 316100;3.河北省电力勘测设计研究院 河北 石家庄 050031)
0 引言
在火电厂机组控制方面,锅炉主蒸汽温度是一个很重要的被控参数,能否对主蒸汽温度进行有效的控制,对机组安全经济运行至关重要。目前,各类PID控制器因其参数物理意义明确、易于调整,在热工控制系统中占据着主导地位。但是,常规PID控制器本身存在的一些缺陷使它在实际应用中的控制效果不是很理想。因此,设计一种能够适应多种工况变化、具有较强鲁棒性的锅炉主汽温控制系统尤为重要。
遗传算法与人工神经网络都是在生物学原理基础上的科研成果。将其结合研究,可以借鉴二者长处寻找求解复杂问题的有效途径。将遗传算法与神经网络结合,可以使神经网络系统扩大搜索空间、提高计算效率以及增强神经网络建模的自动化程度。
1 优化方案及算法实现
在实际应用中,绝大部分神经网络模型都是采用BP神经网络及其变换形式,BP神经网络是前向网络的核心部分,同时BP网络也存在着学习收敛速度慢、不能保证收敛到全局最小点等缺陷,其权值通常由梯度法来确定,因此经常经过多次反复试验却很难找到最优的权值。另外,实际问题的求解空间往往存在多个局部极值点,使得BP算法陷入局部极值点的可能性增大。在实际的应用研究中,网络结构还没有一种比较成熟的理论方法,往往采用递增或递减的试探方法来确定,其设计基本上依赖于经验[1-5]。利用遗传算法全局搜索的特性优化神经网络的连接权和网络结构,可以较好地克服这些问题和有效地提高神经网络的性能。
基于遗传算法优化神经网络的基本思想[6-7]为:改变BP算法依赖梯度信息调整网络权值,利用遗传算法全局性搜索的特点,寻找最为合适的网络连接权和网络结构。其结合算法的学习过程如图1所示。
文中采用一种实数编码方案,即将网络的隐层数、节点数、隐层S型函数形状参数和连接权值、阈值级联成码串,在满足某一特定性能指标的前提下,寻找全局最优解,进而确定网络的最优结构和权值参数。这样每一个染色体串就描述了一个神经网络。为了计算每一个个体的适应值,我们将该个体串赋给网络参数(解码)。该网络对训练输入样本进行运算,然后根据输出样本返回误差平方和(适应度)。在遗传算法中,网络起到计算函数的作用,即在遗传算法全局寻优的基础上进行BP神经网络局部寻优,进而得到网络的最优解。
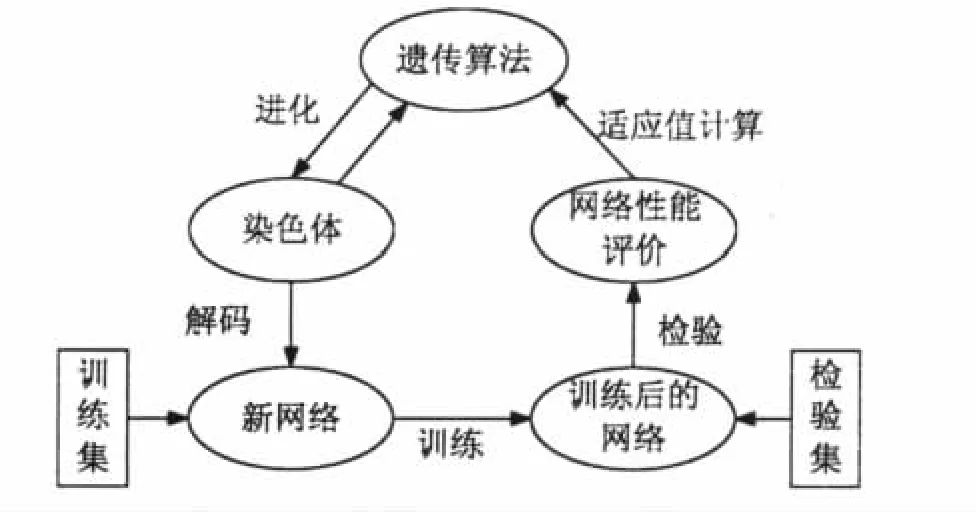
图1 基基于遗传算法的BP神经网络学习过程
2 遗传算法优化具体实现设定
2.1 编码方式
采用实数编码方案,由于码串过长会造成计算量太大而影响收敛速度和训练的精度,所以这里设定网络的结构固定。系统中有8个参数需要优化,即:

式中:p1~p6分别代表GA-BPNN的学习速率和惯性指数 αp、ηp、αi、ηi、αd、ηd,p7和 p8代表辨识器的和。
2.2 初始群体
在Matlab环境下,随机产生网络的初始群体popn(N,L),N为群体规模,L为码串长度,一般群体规模取N=20·150,这里选择初始种群为50,最大进化代数为100。在生产中要求8个向量均为0~1之间的随机小数。因为在一般的控制过程中kp值相对于其他两个参数要稍大些,所以为了加快遗传算法的寻优速度,可以使代表αp和ηp的向量p1和p2值稍大一些。
2.3 目标函数的确定
根据衡量控制系统指标的三个方面,即稳定性、准确性和快速性,选择了控制量、上升时间和误差作为遗传算法寻优的约束条件,目标函数为:
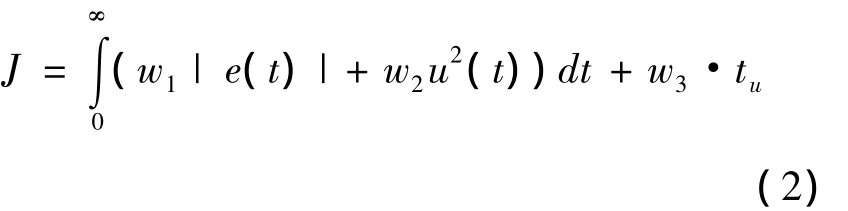
式中:e(t)为系统误差,u(t)为控制器输出,tu为上升时间,w1、w2、w3为权值。为了避免超调,采用了惩罚功能,即一旦产生超调,将超调量作为最优指标的一项,此时最优指标为:
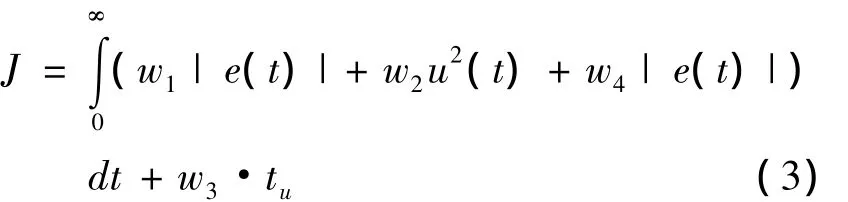
式中:w4为权值且w4·w1,y(t)为被控对象输出。
3 仿真分析
电站锅炉主汽温控制系统大多采用串级控制系统,其中内回路起粗调作用。文中采用基于改进遗传算法的BP神经网络来建立参数kp、ki、kd自学习的PID控制系统,并采用带有辨识的神经元PID控制器,用以克服对象的迟延和模型的不确定[8]。具体方法是:在BP算法中增加惯性项,并利用改进的遗传算法优化神经网络的结构和权值。设计系统如图2所示。

图2 基于遗传算法的BP神经网络PID控制示意图
为验证所设计的基于遗传算法的BP神经网络对主蒸汽温度对象的控制效果,本文采用文献[9]中600 MW直流锅炉过热汽温在不同负荷下的动态特性来进行仿真。按照随动系统整定导前区对象和P控制器构成的副回路系统,将整定好的副回路系统与惰性区对象共同形成广义被控对象,经拟合后表示成一阶时滞对象,动态特性如表1所示。
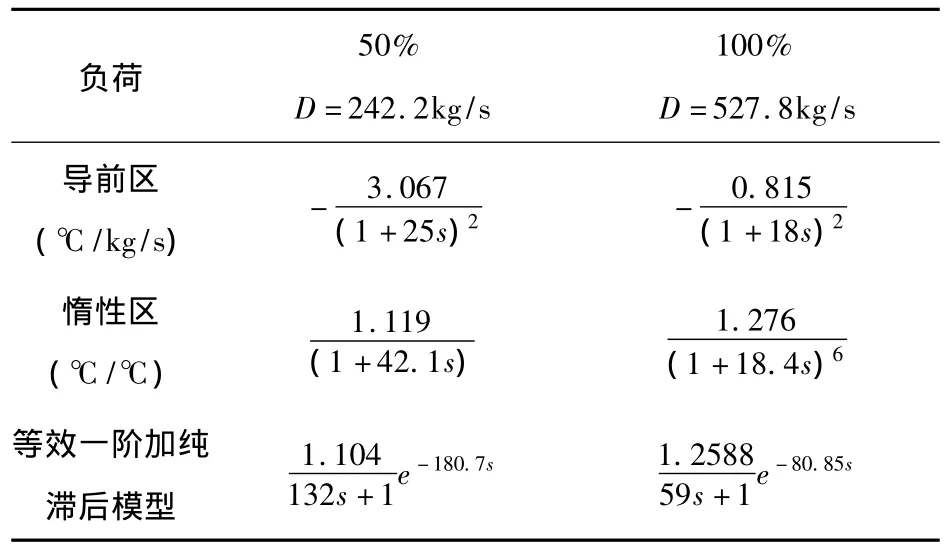
表1 某600 MW直流锅炉过热汽温对象动态特性
600 MW直流锅炉主汽温在负荷为50%时,在单位阶跃信号作用下,其仿真结果如图3所示:
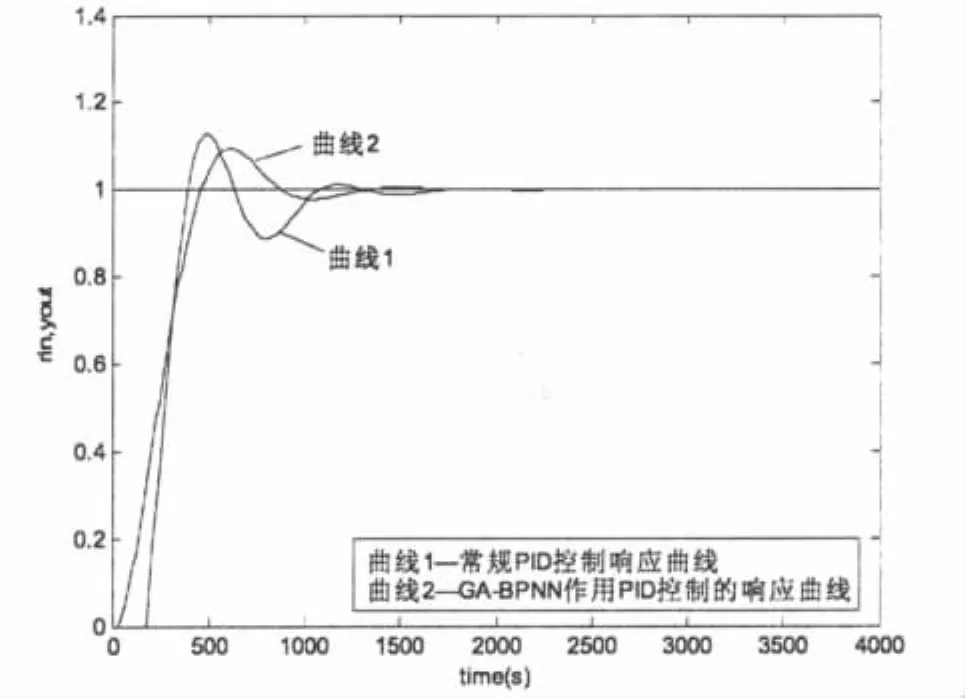
图3 阶跃响应曲线(50%负荷)
600 MW直流锅炉主汽温在负荷为100%时,在单位阶跃信号作用下,其仿真结果如图4所示:
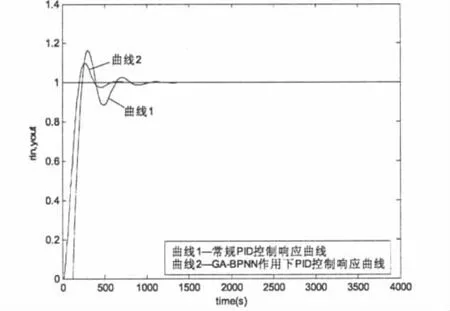
图4 阶跃响应曲线(100%负荷)
为了进一步说明该方法的有效性,某一时刻在控制器输出端加上0.1的增值来模拟系统扰动的情况,仿真结果如图5和图6所示:
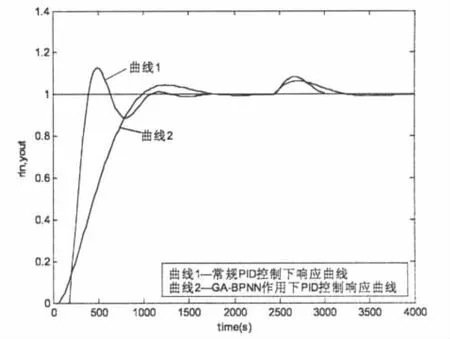
图5 加入扰动后的阶跃响应曲线(50%负荷)
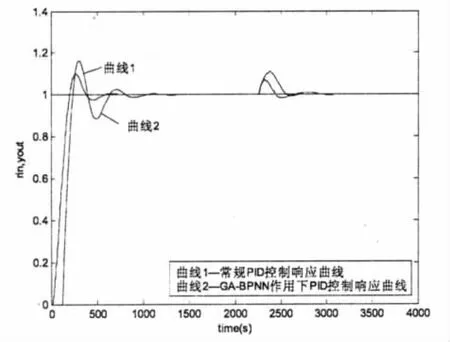
图6 加入扰动后的阶跃响应曲线(100%负荷)
根据图3至图6,可以看出对于锅炉过热汽温被控对象来说,基于遗传算法-BP神经网络的控制与常规PID控制相比,在信号跟踪和快速性上要好,即使是在系统有扰动的情况下,也能较快较平稳的趋于稳定。常规PID控制由于参数不能自动寻优,从而使响应曲线有较大的延迟、超调和振荡,不利于系统的稳定性。而在基于遗传算法的BP神经网络作用下的PID控制有较好的自适应性和自学习能力,能够实现参数在线调整,实现对被控对象实时控制。
4 结论
文中介绍了应用遗传算法优化神经网络的具体实现过程,并根据电站锅炉主蒸汽温度被控对象的动态特性,利用Matlab软件进行了计算机仿真。通过仿真试验可知:本文采用遗传算法根据辨识系统提供的学习信息对神经网络进行优化,从而使PID控制参数有很强的自适应和自学习能力,即使在被控对象的参数发生变化的情况下,仍能保证系统的动态和静态特性。因此,对于电站锅炉主蒸汽温度被控对象来说,基于遗传算法的BP神经网络的PID控制要比常规PID控制效果要好一些。
[1]马平,朱燕飞,牛征.基于神经网络的主汽温控制系统[J].华北电力大学学报,2001,28(2):52-55.
[2]吴建生,金龙 ,农吉夫.遗传算法BP神经网络的预报研究和应用[J].数学的实践与认识,2005,35(l):83-88.
[3]高宏宾,焦东升,彭商濂.一种基于遗传算法的改进BP算法[J].计算机与现代化,2006,3:6-8.
[4]陈立君,王克奇,王辉.基于BP神经网络木材治理分类的研究[J].森林工程,2007,23(1):40 -42.
[5]李晓娟,丁艺,岳小泉,等.基于BP神经网络的道路交通事故损失预测[J].森林工程,2006,22(5):57-59.
[6]Wang Ruili,Wu Jiansheng,Kemp.A Genetic-Algorithm-based Neural Network Approach for Shortterm Traffic Flow Forecasting[C].Second International Symposium on Neural Network Proseeedings,2005,3498(3):965-970.
[7]栾庆林,卢辉斌.改进遗传算法在神经网络权值优化中的应用研究[J].遥测遥控,2008,29(1):51-54.
[8]韩宇光,曹军,朱良宽.刨花板热压控制系统模糊自适应 PID 控制[J].森林工程,2011,27(4):30 -33.
[9]刘志远,吕剑虹,陈来九.智能PID控制器在电厂热工过程控制中的应用前景[J].中国电机工程学报,2002,22(8):128-134.
猜你喜欢
成都信息工程大学学报(2022年3期)2022-07-21 09:35:04
黑龙江大学自然科学学报(2021年4期)2021-11-19 07:05:06
沈阳师范大学学报(教育科学版)(2021年2期)2021-02-01 07:00:46
机电工程技术(2018年10期)2018-12-06 02:26:38
天津教育·下(2018年9期)2018-07-13 08:25:47
自动化学报(2017年7期)2017-04-18 13:41:02
电力自动化设备(2013年11期)2013-09-18 02:55:14
电气电子教学学报(2012年1期)2012-10-12 03:27:48
