
单锚腿系泊系统参数化设计的研究
2012-07-09 01:16:32陈锦昌邓华东
图学学报 2012年6期
陈锦昌, 邓华东
(华南理工大学设计学院,广东 广州 510006)
在货船吨位大型化发展的今天,单点系泊系统是海上进行远距离运输中,轮船在港口、码头建立的单点系泊码头,其相比传统的码头而言具有明显的优势[1]。这种系统主要表现为:一是解决了绝大部分港口航道较窄、较浅、规模较小,不能与大型油轮和超大型油轮发展相匹配的矛盾;二是受气候影响较小;三是节约投资,其费用约是建设一般码头的四分之一到三分之一;四是布局受海域的限制较小,并且有一定的灵活性,能充分利用天然水深。在单点系泊系统中,单锚腿系泊系统,简称SALM(Single Anchor Leg Mooring)系统是用得较多的一类。如何对单点系泊系统进行参数化设计是一项很有意义的研究。在参数化设计中,单点系泊系统各部分的约束分析和关联分析是参数化设计的关键,本文就SALM系统中约束分析和关联分析进行了研究,在SolidWorks平台上实现了单点系泊参数化的设计系统。
1 系统的约束定义和分析
SALM系统主要由沉块装置、链系、系缆装置、锚链支座(处于浮筒装置的中心,表达略去)和浮筒装置5部分组成,如图1所示。系统三维参数化模型的建立是系统参数化设计实现的关键。在SALM系统所包含的零部件数量较多,各种尺寸关系也十分复杂,零部件的建模顺序以及用户交互参数的确定是系统建模前必须确定的两大关键问题。为此,本课题依据零部件的结构尺寸进行了专门的研究,并提出了一种系统约束的分析方法,较好地解决了这一问题。
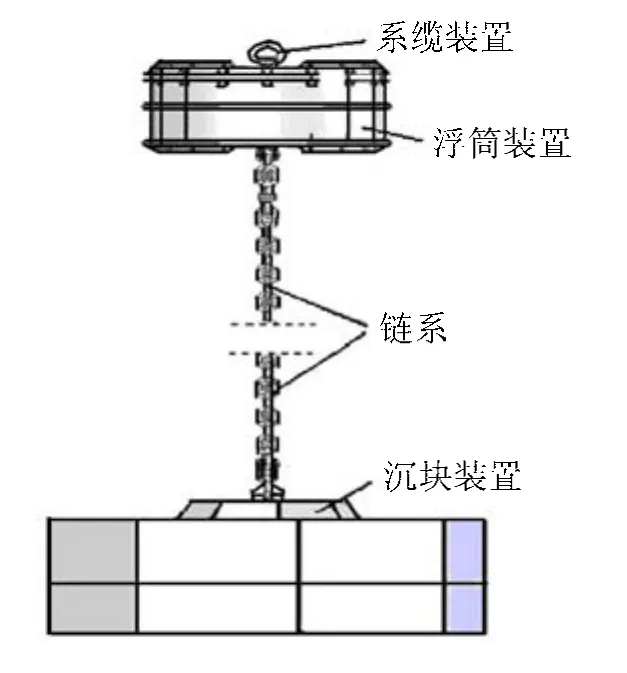
图1 SALM系统
根据SALM系统的建模需要,进行如下定义:
定义1形状约束:能够决定零件结构形状的约束称为形状约束。
定义2位置约束:与零部件在空间或装配体中的位置相关的约束称为位置约束。
定义3零件参数:单独的零件建模时,完全定义一个零件模型时所需要的所有尺寸参数称为零件参数。
定义4装配参数:零部件装配时所要求的所有参数称为装配参数。装配参数不仅包括确定零部件相对位置的定位参数,还包括装配体中所要求同一零件的零件数量的参数和配合关系。
定义5主动参数:产品中随设计要求不同而需要用户交互输入的参数称为主动参数。主动参数可以是零件参数也可以是装配参数。
定义6从动参数:与主动参数相对,指的是产品中随着主动参数的变化,各零部件为了满足功能结构需要能自动调整的参数称为从动参数。
定义7关联:在零件间或装置间有某个尺寸约束或某种位置约束发生,则称两个零件或装置间有关联。
任意零件的约束关系可归结为形状约束和位置约束两类,形状约束决定了零件的参数,位置约束决定了部件的装配参数。实现系统参数化建模[2-3]就是通过对系统结构及零部件尺寸的分析得出形状约束和位置约束,从而确定零部件的零件参数和装配参数,再进一步确定零件参数、装配参数中哪些是主动参数,哪些是从动参数。主动参数由用户依据零部件的结构尺寸输入的值来确定,从动参数由主动参数和约束共同作用来确定,从而确定了整个系统的三维模型。约束在系统建模过程中表现为零部件的建模顺序、建模的方法以及方程式关系的添加等手段。
本系统约束分析方法的步骤为:
第1步,把系统拆分成几个子装配体。拆分的原则是把相互间关联较多的几个零件看作为一个子装配体,在关联较少的零件间看作是子装配体的拆分处。拆分处最好选在没有关联的零件间或只有一个关联的零件间。这种拆分可以一层一层地进行下去,直到零件间的关联、约束分析完成为止。
第2步,在子装配体拆分后,对子装配体进行分析。一般来说,先分析与外界发生关联的子装配体,此时可以利用已知的外界条件来确定子装配体内的一些约束。如果同时有多个子装配体与外界有关联,则选择能够影响整个系统整体定位、总体尺寸的子装配体开始。如果某些子装配体虽与外界发生关联,但这种关联并不能确定子装配体的内部约束,则不选择这个子装配体作为第1个开始分析的子装配体。这种思想也可以在子装配体的零件分析中使用,用来确定此子装配体中应该第1个建模的零件。
第3步,分析子装配体内部零件间的关联。在分析子装配体内部零件间的关联时,可能会遇到两个这样的问题,一是当A、B两个零件相互关联时,要考虑选择哪个零件作为被关联的对象有利于这个子装配体的分析;另一个是A零件的某个零件参数或装配参数,既与B零件相关联,也与C零件相关联,那么A零件到底应该与哪个零件发生关联比较好。对于第1个问题解决办法是先根据第2步的思想找到此子装配体内的决定第1个建模的零件。对于第2个问题的解决办法是尽量让待确定的零件与已确定的零件间发生尽可能多的关联,且尽量让关联集中在较少的零件间发生,从而确定该零件。
第4步,根据子装配体内部零件间的关联和已知的外界条件,确定子装配体内部各零件的形状约束、位置约束,从而确定子装配体内各个零件的建模顺序。
第5步,分析子装配体内所有零件的零件参数、装配参数,确定哪些是主动参数,哪些是从动参数。
系缆装置作为SALM系统中一个主要部分,其由系缆眼环、轴环、销轴和开口销4个零件组成,如图2所示。在实际工程中,系缆装置的系缆眼环与缆绳连接,销轴与锚链连接,从而实现锚泊力的传递,即此装置中只有系缆眼环和销轴与外界关联。
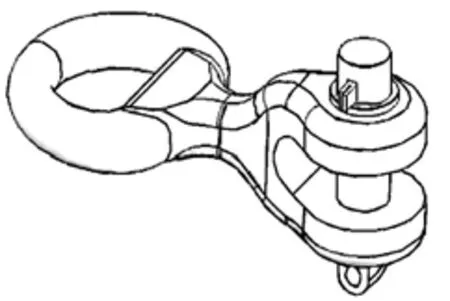
图2 系缆装置
因此,根据系统约束分析法第2步的思想,系缆眼环是该装置第1个建模的零件,因为它影响整个子装配体的整体定位,如图3所示。

图3 系缆眼环
结合系缆装置实际设计中的一些具体关系,系缆装置的约束分析如表1所示。

表1 系缆装置的约束分析
从以上分析可知,销轴是参照其他零件较多的零件,而系缆眼环不需要参照其他零件,再次说明系缆眼环是此装置中应第一个建模的零件。因此,通过系缆装置子装配体的约束分析,得到子装配体的建模顺序为:系缆眼环→轴环→销轴→开口销。
SALM系统的沉块装置、链系、浮筒装置等可同理分析,系统的约束定义和分析简化了系统参数化设计的复杂性。
2 系统的关联分析
对SALM系统的沉块装置、链系、系缆装置、锚链支座和浮筒装置进行了约束分析后,还要进行系统的关联分析,通过关联分析确定各装配体建模的先后。
沉块装置是个又重又大的块体,重达几十吨到上百吨,埋在海底泥面以下;链系是一根很长的链条,由普通环、加大环、卸扣、末端环、转环等组成,一般长达百米左右,也有几百米的;浮筒是系泊系统的主体部件,漂浮在海面上,可以随着洋流在一定的范围内漂动;系缆装置是连接链系与浮筒装置的中间装置,同时还供缆绳连接来系泊油轮;锚链支座在浮筒装置的中心,是一个单独的零件,是系缆装置和浮筒装置的中间
连接部件。整个SALM系统是沉块固定在海底,通过链系牵制浮筒和系缆装置在一定的海面上漂动。
链系末端与沉块装置间的关联,如图4所示。链系末端的末端环与沉块装置的U形锻件要求应能轻松装配,不能相互卡死,也就是说当末端环的尺寸确定后,U形锻件的直径应有最大值的限制,以及U形锻件的开度应有最小值限制。

图4 链系与沉块装置间的关联
链系上端与系缆装置、系缆装置与锚链支座、锚链支座与浮筒装置间的关联,如图5所示。链系上端的末端环与系缆装置的轴销、系缆眼环间装配好后要求有一定的自由活动空间,其间隙取决于经验的数据。锚链支座与浮筒装置的上内锥板间有关联,锚链支座要求与上内锥板的锥面相切接触,且不能插入浮筒的环形板内。
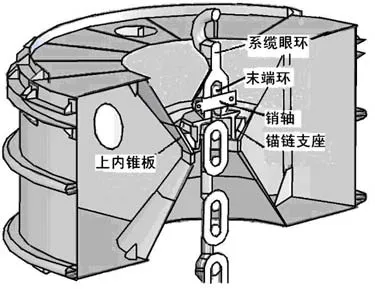
图5 链系、系缆装置、锚链支座、浮筒装置间的关联
本系统各子装配体间的关联如表2所示。
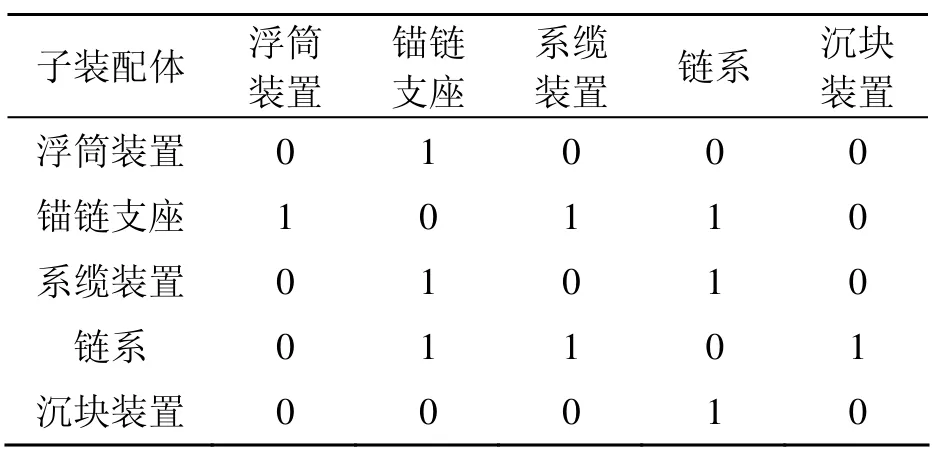
表2 子装配体间的关联
从表2可知,链系和锚链支座的关联关系最多,但锚链支座与浮筒装置的关联在实际的设计中是浮筒装置决定锚链支座,因为锚链支座只是个中间连接件,而浮筒装置是核心部件,所以浮筒装置应该在锚链支座前建模。锚链支座与系缆装置的关联是相切接触,这个关联不产生零件尺寸约束,所以它们之间的建模次序无所谓先后。在实际的设计中,浮筒装置的设计应在链系之后,因为浮筒装置浮力要承受链系的重力,所以浮筒装置应在链系之后建模。链系的是标准件,在系统外界的最大系泊力确定后,根据锚链制造标准最容易选定,且链系与关联的零件都有尺寸约束,所以链系应作为第1个建模的子装配体。系缆装置的关联分析如表3所示。
从表3可知,销轴的关联数最多,达到3个,说明该零件不是多数零件的参照,就是需要参照其他零件较多。SALM系统的沉块装置、链系、浮筒装置等的关联分析可同理进行。
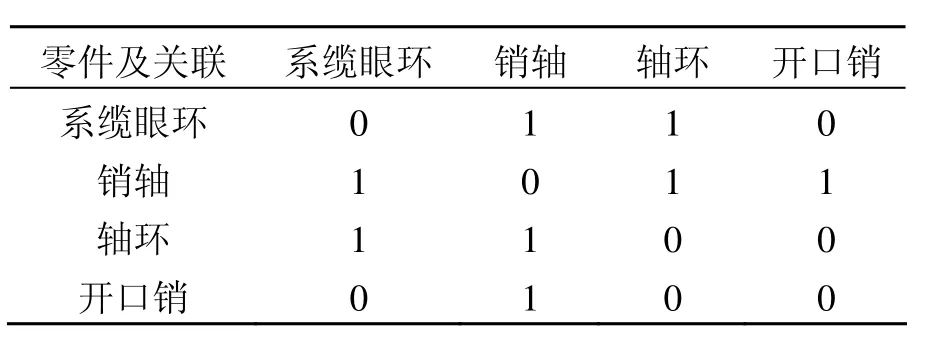
表3 系缆装置的关联分析
通过对SALM系统5个子装配体的关联分析,建模顺序可定为:链系→沉块装置→系缆装置→浮筒装置→锚链支座。这一建模次序考虑到锚链支座与浮筒装置有关联,为了方便系统的开发时这两个关联装置间的关联处理,从而先对沉块装置、系缆装置建模,再对建浮筒装置建模。
3 参数化设计系统的实现
在对SALM系统进行了约束分析及关联分析后,基于Solid Works平台[4],作者开发了单点系泊参数化设计系统。图6为设计系统的主界面。

图6 单点系泊系统设计的主界面
对单锚腿系泊系统中的每一个组成部分均有相应的参数化建模设计界面。
4 结 论
单锚腿系泊系统的参数化设计研究与三维建模的实现,验证了本课题研究的可行性,其对于单点系泊系统的参数化CAD系统的开发研制具有实用性,同时可以为其他的系泊系统的参数化CAD系统的开发研究提供了一种有效的途径。
[1] 许向东,蔡世亮,等. 单点系泊技术及CALM系统的操作维护和管理[M]. 北京: 企业管理出版社,1998:88-103.
[2] Ang Xueye,Guo Yongkun. Parametric 3D modeling of worm and worm gear based on AutoCAD [J].CADDM,2010,20(1): 9-14.
[3] Zhao Yao,Yu Qingbo,Li Lingxin. Three-dimensional concurrent Ddesign system for walking-beam furnace[J]. CADDM,2010,20(1): 1-8.
[4] 叶炜威,等. SolidWorks2006实体建模与二次开发教程[M]. 北京: 国防工业出版社,2006: 182-183.
猜你喜欢
江苏船舶(2023年2期)2023-06-14 11:07:44
中国海洋平台(2022年5期)2022-11-01 09:54:50
水道港口(2022年1期)2022-05-18 13:01:20
房地产导刊(2022年4期)2022-04-19 09:04:22
船海工程(2021年6期)2021-12-17 03:17:44
船舶标准化工程师(2020年1期)2020-06-12 09:16:24
中国航海(2018年1期)2018-05-07 11:12:23
船海工程(2018年1期)2018-03-01 02:47:04
世界海运(2017年10期)2017-10-19 05:57:44
船舶(2014年2期)2014-01-04 02:30:00
