
基于曲率的GPU光线投射
2012-07-09 01:16:22袁斌
图学学报 2012年6期
袁 斌
(北京应用物理与计算数学研究所,北京 100088)
基于曲率的绘制十分有用,它可以帮助科学家分析曲率分布,设计新的计算模型。曲率可以用来表现线状特征和粒状特征。K. Gordon等在CPU中实现了基于B样条滤波的曲率计算[1],但计算速度较慢。采用 GPU可以大大加速曲率的计算。
现代 GPU已经发展成为众核处理器,具有强大的计算能力和高内存带宽。在一般的图形卡上,采用多条绘制流水线,可以对顶点(vertex)计算和片元(fragment)计算进行并行处理。采用GPU可以大大加速体绘制,如基于切片的体绘制方法[2-4]和GPU的光线投射方法[5-7]。预先计算一阶导数、二阶导数,需要占用大量的存储空间(存储梯度和Hessian矩阵),这显然是不能接受的。因此需要实时计算他们。
本文在GPU上实现了基于线性滤波的曲率计算方法和并将C.Sigg方法结合到GPU光线投射方法中,按需计算导数,曲率和光照效果。在线性滤波情况下,一阶导数和二阶导数无法精确计算,只能采用差分方法。在三三次B样条滤波条件下,可以精确计算标量,一节导数、二阶导数。本文给出有效的计算曲率的方法。设计多种关于曲率的函数,实现了交互选择曲率函数,突出感兴趣特征的方法。
1 相关工作
S. Stegmaier给出单趟GPU光线投射方法[5]。该方法预先计算梯度并保存起来,这样必然占用大量的内存。在透视投影下,光栅化时如果直接采用线性插值,就不能正确计算片元的颜色、纹理坐标等属性,为此OpenGL对插值算法作了修正,这样它可以正确计算片元的属性[8],这是基于代理面的GPU光线投射的基础。T. Klein给出结合预积分的GPU光线投射方法[6],通过绘制体的前表面得到光线的起点,起点减去相机的位置(在纹理空间)得到光线的方向。Scharsach的论文[7]把体包围盒顶点坐标转换成颜色,并设置为顶点颜色。绘制前面和后面到不同的缓冲区,后面的图像减前面的图像,得到光线方向,并根据这个方向进行光线积分。该文还设计基于块的空区域跳跃方法,通过深度测试,把第一前面和最后一个后面绘制到不同的缓冲区中,这样在光线积分时可以跳过前面和的后面的空区域,提高了光线投射的速度。郑杰等在纹理切片体绘制方法中,采用实时计算梯度的方法[9],大大节省纹理内存,适合于大规模数据场,是很好的方法。K.Gordon等[1]在CPU中实现了基于B样条一阶导数、二阶导数以及曲率计算,但计算速度较慢。C.Sigg等[10]在GPU中实现基于B样条的一阶导数、二阶导数快速计算,并应用到最大主曲率的计算;并把该方法与等值面绘制结合,绘制速度很快;但未把该方法与光线投射体绘制结合。
2 基于曲率GPU光线投射
本文实现基于曲率的可视化,要计算隐式曲面的曲率,需要计算Hessian矩阵和梯度。
一阶导数,二阶导数计算采用实时计算方法。如果预先计算各种导数,每个网格节点需要保存3个一阶导数,3个二阶导数,和3个二阶偏导数,需要多存储9个数据,若采用单字节表示,另外需要 1个字节保存梯度量,则需要 10个字节,存储量将是本文方法的 11倍。采用这种方法,精度很低,会降低绘制质量。若采用浮点数表示标量和导数,存储量为本文方法的 37倍。对较大的数据,如 Xmas-Tree,不可能装入到纹理内存。因此,不能采用预计算一阶导数,二阶导数的方法。
2.1 基于B样条滤波的按需计算导数的方法
在线性滤波条件,采用近似的导数计算公式,而在B样条滤波条件下,存在精确的导数计算公式。当用B样条滤波重构数据场时,本文采用 C.Sigg方法快速计算标量和导数[10]。这里分析一下C.Sigg的方法的邻点数并进行优化处理。
如图1所示,计算标量需要8个邻点,计算梯度需要24个邻点,计算二阶偏导数需要24个邻点,计算二阶导数需要计算36个邻点。用Tex指令取出邻点上的标量值。

图1 C.Sigg 方法
计算导数和曲率需要大量的计算,本文按需计算导数,曲率和光照。这样可以大大加速计算。在GPU光线投射算法中,用C.Sigg方法计算标量值,需要用8个Tex指令取出当前采样的(8个)邻点上标量值,结合前一采样点的标量值,得到当前积分步的不透明度,如果不透明度为非0,用 C.Sigg方法计算计算导数,需要用 84个Tex指令取出(84个)邻点上标量值,然后计算曲率以及光照效果。这样有效地加速绘制过程。
2.2 基于线性滤波的按需计算导数的方法
目前的 GPU已经实现基于线性滤波的纹理映射,没有实现基于高次滤波的纹理映射。在线性滤波条件下,近似计算各种导数。
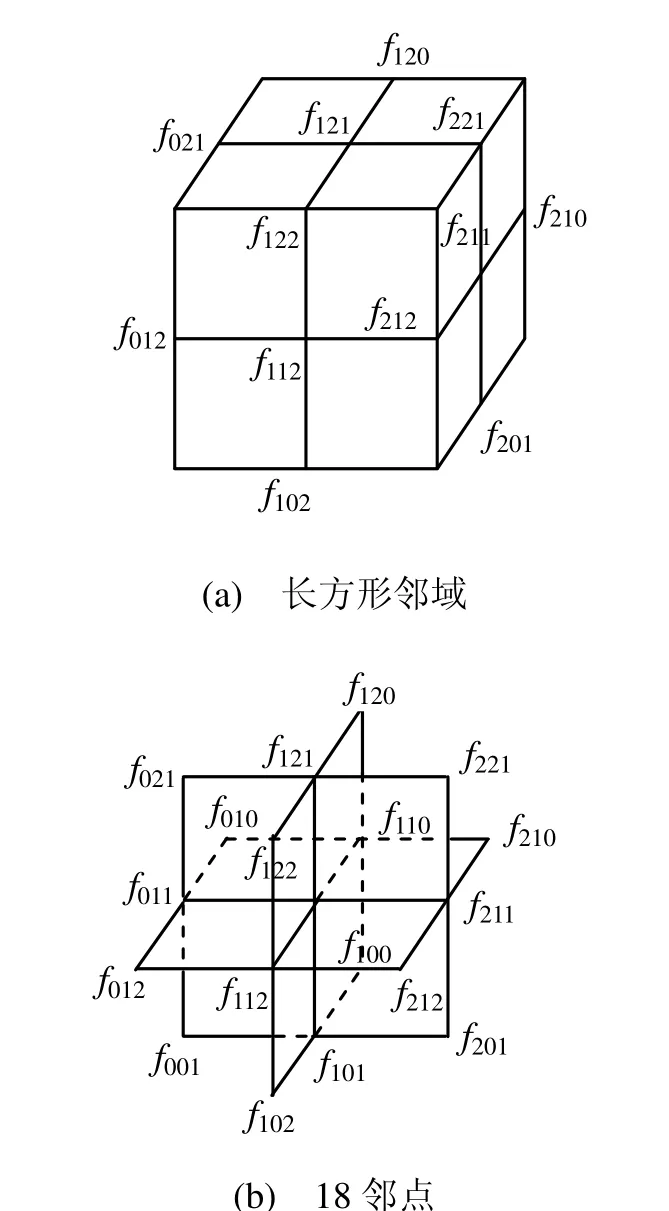
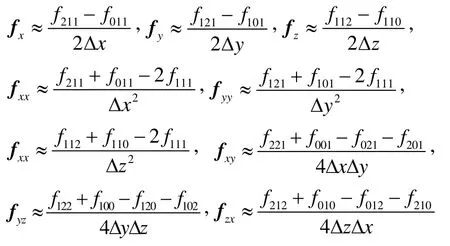
图2 领域和邻点示意图
考虑以采样点为中心的2×2×2轴向长方形网格D,其网格间隔与被处理的网格一致,D被称为采样点的邻域,其节点数为3×3×3,节点上的物理量记为其中f111等于光线段上当前采样点的值。因为光线段上的采样点一般不在网格节点上,所以,D的节点一般情况下,位于原网格单元的内部,而不是在节点上。采用中心差分计算一阶导数和二阶导数需要18个邻点,以光线采样点为中心,取18个邻点,如图2(b)。邻点的物理值通过三线性插值计算,通过纹理映射实现。采用向量指令计算梯度和Hessian矩阵,用一个向量保存对角元素( fxx,fyy,fzz),另一个向量保存( fxy,fyz,fzx)
在光线投射算法中,先用1个指令取出当前的标量值,结合前一采样点的标量值,得到当前积分步的不透明度,如果不透明度非0,采用18邻点方法,计算梯度,Hessian矩阵和曲率,是一个实用的方法。
2.3 曲率计算方法


称为总曲率. 将 trace(P HP(P HP )T)直接展开比较麻烦。采用矩阵计算会简捷一些,但仍然需要采用较多步数,因此,不同于文献[1],本文不直接计算,而是先计算高斯曲率,下面给出高斯曲率公式的简单推导过程

这样,可以用向量乘法和DP3指令实现以上公式[11]。导数、二阶导数和曲率均在物理空间计算,而不是在图像空间计算。在计算出b和c后,就可以计算主曲率。
主曲率可以描述曲面的局部特征,根据主曲率,曲面上的点可以分为椭圆点,双曲点,和抛物点。曲面的几何特征如“沟谷”,“山脊”,“山峰”,“洼坑”,线状特征和粒状特征等与曲率密切相关。根据需要设计关于主曲率的函数F(κ1,κ2),来突出感兴趣的特征。

2.4 曲率GPU光线投射的实现
实现基于代理面的 GPU光线投射体绘制的基本步骤是:
1)把数据场装入GPU内存;
2)装入写缓冲区和光线积分片元程序;3)连接写缓冲区的片元程序;
4)绘制数据体的后表面到FBO;
5)连接GPU光线投射的片元程序;
6)设置GPU光线投射程序的局部参数;7)绘制数据体的前表面。
开始时,实现基于B样条滤波的曲率GPU光线投射,未考虑按需计算导数,绘制速度较慢。为了加速绘制,采用按需计算导数的方法。
F为关于主曲率的函数,向量v的x,y分量分别保存当前积分步两端的标量值。基于曲率的GPU光线投射算法如下:
算法1 基于曲率的光线投射算法
把当前纹理坐标(即当前光线与前面的交点)保存到tex0;
置光线累积透明度为0;
从FBO中取出背面上的纹理坐标,即当前光线与数据体后表面的交点;
计算光线方向;
修正采样步长;
计算当前光线总的积分步数;
计算单步增量;
LOOP (255,0,1){
LOOP (255,0,1){
将当前采样点的坐标变换到基本纹理空间;
计算当前采样点的标量值scal;
if(当前采样点是第一个采样点)v.x = scal;
否则{
当前积分步终点标量值v.y = scal;
用v查预积分表得到不透明度;
v.x = scal;
如果当前积分步不透明度非0{
用SIMD方法计算标量、法向量、
偏导数和二阶导数;
计算法向量的模;
采用SIMD方法计算高斯曲率和主曲率之和;
计算F;
规格化梯度量;
根据梯度量查调制因子;
将F转换为颜色;
用当前积分步的不透明度预乘颜色;
计算光照;
用当前积分步的不透明度修正镜面光;
用梯度量调制环境光、漫反射光和镜面光;
累积颜色;
调制当前积分步的不透明度;
累积光线段的透明度;
如果累积透明度小于0.02,退出循环;
}
}
前进一步;
如果累积步数等于总步数,退出循环;
}
}
计算光线不透明度;
输出颜色和不透明度;
注:LOOP (255,0,1)表示循环255次。
在GPU光线投射的片元程序中实现算法1,算法采用按需计算导数的方法。根据当前采样点的标量和前一采样点的标量,查预积分表取得当前积分步的不透明度,只有不透明度非0时,才计算梯度、Hessian矩阵、曲率和光照。计算标量时,如果采用线性滤波,用一个Tex指令取出当前采样点的标量值[11];若采用B样条滤波,用8个Tex指令取出8个邻点。在计算导数时,若采用线性滤波需要18个邻点;若采用B样条滤波,需要 84个邻点。颜色转换函数把关于主曲率的函数F(κ1,κ2)转换成颜色。颜色转换函数和预积分表用纹理实现。用 GPU快速计算预积分[12],这样可以交互修改转换函数。函数F的值紧缩到[0.02,0.98],如果它大于 0.98,置为 0.98;如果小于0.02,置为0.02。
本算法充分利用SIMD技术进行计算。采用光线早中止加速绘制过程。在本文中,采用SIMD方法计算高斯曲率和主曲率之和,只需要 17条指令。计算高斯曲率的一些中间结果可以用来计算主曲率之和。temp3保存二阶导数,temp5保存二阶偏导,normal保存法向量。temp2.x为法向量模的平方。下面是相关的程序段。
MUL temp8,normal,normal;
ADD temp9,temp8.yzxw,temp8.zxyw;
DP3 temp9.x,temp9,temp3;
MUL temp7,temp3,temp3.yzxw;
DP3 temp4.x,temp7,temp8.zxyw;
MUL temp7,temp5,temp5;
DP3 temp4.y,temp7,temp8.zxyw;
MUL temp8,normal.yzxw,normal.zxyw;
DP3 temp9.y,temp5,temp8.zxyw;
MUL temp7,temp5,temp5.zxyw;
DP3 temp4.z,temp7,temp8;
MUL temp7,temp3,temp5.yzxw;
DP3 temp4.w,temp7,temp8;
DP4 temp6,temp4,{1,-1,2,-2};
DIV temp6,temp6,temp2.x;// 计算高斯曲率;
DP2 temp10,temp9,{1,-2,0,0};
MUL temp10,temp10,temp1.x;;// 计算主曲率之和;
我们已经基于 VTK[13]实现了一个可视化原型系统,将本文算法集成到原型系统中进行测试。在原型系统中,实现了修改转换函数以及保存、恢复交互参数的功能。
在GPU光线投射中,采用高次B-样条滤波可以起到光顺作用,消除走样现象,绘制质量很好。但是由于采用B样条滤波,计算量较大,绘制速度较慢。本文同时实现了基于线性滤波和B样条滤波的按需计算导数的GPU光线投射方法。在原型系统中,增加了选择曲率函数的交互功能;修改保存和恢复功能,使之包括曲率函数。
在交互过程中,先采用基于线性滤波的绘制方法交互选择必要的相机参数、转换函数和曲率函数,再用基于B样条滤波的方法绘制高质量图像。
3 实验与分析
本文在GPU上实现了基于线性滤波和B样条滤波的按需计算导数、曲率和光照效果的光线投射方法,分别记为LRT和BRT,为了便于比较,还实现了基于B样条滤波的非按需计算导数(曲率和光照效果按需计算)的光线投射方法,记为BRTN。本文在装有NVIDIA NVS 4200M 显卡的intel i5机器(便携式电脑)上测试算法。以下测试中,除非有特殊声明,采样步长为最小网格间隔的1/4光线积分计算中,采用光线早中止技术,不透明度决定了实际的采样步数,颜色转换函数不影响采样步数。在测试绘制速度时,对一种数据,选择一个曲率函数即可。在测试过程中,本文利用基于线性滤波的光线投射方法 LRT交互选择相机设置、各种转换函数和曲率函数,突出感兴趣的特征,然后用基于 B样条滤波的方法BRT绘制高质量的图像。
图3(a)与图3(b)绘制质量相同,图3(b)速度更快。B样条滤波可以更好地突出特征,如图3(b)所示,而线性滤波淡化了特征,如图3(c)所示。从图3可以看出,+0.4可以较好地表现线状特征(绿色)。图4为head数据,采样步长为最小网格间隔的1/16,采用B样条滤波,管状特征很光滑;而采用线性滤波,图像质量可以接受。图5(a)与图5(b)绘制质量相同,图5(b)速度更快。B样条滤波可以更好地突出特征,如图5(b)所示,而线性滤波淡化了特征,如图5(c)所示,适当调整颜色转换函数可以增强特征。从图5可以看出,高斯曲率可以较好地表现粒状特征(红色或绿色)。这些粒状特征是由噪声引起的。高斯曲率可以分析噪声的分布。

图5 foot 数据256×256×256,高斯曲率Fg
如图6(a),图6(b)所示,绘制质量相同。基于B样条滤波F0函数可以很好表现松针。如图6(c)所示,基于线性滤波,F0也可以表现松针,但质量较差。F0可以用于提取线状特征。

图6 Xmas-Tree 数据 512×512×999,F0
如图 7(a)所示,平均曲率 Fm既可以表现线状特征,又可以表现粒状特征;图7(b)采用总曲率Ft突出了线状特征。
由表1可以看出,按需计算可以大大加快绘制速度,线性滤波快于B样条滤波。采用线性滤波可以进行交互绘制。
LRT先用1个Tex指令取出当前的标量值,结合前一采样点的标量值,得到当前积分步的不透明度,如果不透明度非0,采用18邻点方法,计算梯度,Hessian矩阵和曲率,是一个实用的方法。BRT用C.Sigg方法计算标量值,需要用8个Tex指令取出当前采样的(8个)邻点上标量值,结合前一采样点的标量值,得到当前积分步的不透明度,如果不透明度为非0,用C.Sigg方法计算计算导数,需要用84个Tex指令取出(84个)邻点上标量值,然后计算曲率以及光照效果,从而有效地加速绘制过程。BRT绘制质量比基于LRT好,LRT速度比BRT快。本文的方法可以交互选择曲率函数,突出感兴趣的特征,从而帮助科学家有效地分析数据。

图7 平均曲率和总曲率的绘制效果(BRT绘制)

表1 绘制时间比较
[1] Kindlmann,G,Whitaker R,Tasdizen T,et al. 2003 Curvature-based transfer functions for direct volume rendering: Methods and applications[C]//Proceedings of IEEE Visualization,2003: 513-520.
[2] Cabral B,Cam N,Foran J. Accelerated volume rendering and tomographic reconstruction using texture mapping hardware [C]//Proceedings of the 1994 Symposium on Volume Visualization,New York,NY,USA,ACM Press,1994: 91-98.
[3] Engel K,Kraus M,Ertl T. High-quality pre-integrated volume rendering using hard-ware-accelerated pixel shading [C]//Proceedings of the ACM SIGGRAPH/EUROGRAPHICS Workshop on Graphics hardware,2001: 9-16.
[4] 童 欣,唐泽圣. 基于空间跳跃的三维纹理硬件体绘制算法[J]. 计算机学报,1998,21(9): 807-812.
[5] Stegmaier S,Strengert M,Klein T,et al. A simple and flexible volume rendering framework for graphics-hardware-based raycasting [C]//Proceedings of the International Workshop on Volume Graphics'05,Stony Brook,New York,USA,2005: 187-195
[6] Klein T,Strengert M,Stegmaier S,et al. Exploiting frame-to-frame coherence for accelerating highquality volume raycasting on graphics hardware [C]//Proceedings of IEEE Visualization,2005: 223-230.
[7] Scharsach H. Advanced GPU raycasting [C]//Proceedings of Central European Seminar on Computer Graphics 2005,Budmerice Castle,2005:69-76.
[8] Segal M,Akeley K. The OpenGL graphics system: a specification [EB/OL]. 2004.http://www.opengl.org/documentation/specs/
[9] 郑 杰,姬红兵. 基于动态纹理载入的大规模数据场体绘制[J]. 中国图象图形学报,2008,13(2):316-321.
[10] Sigg C,Hadwiger M. Fast third-order texture filtering [C]//Book Chapter in GPU Gems II,Matt Pharr(ed.),Addison Wesley,2005: 313-329
[11] NVIDIA. NVIDIA OpenGL extension specifications. 2011. https://developer.nvidia.com/nvidia-opengl-specs
[12] 袁 斌. 改进的均匀数据场 GPU 光线投射[J]. 中国图象图形学报,2011,16(7): 1269-1275.
[13] Martin K,Schroeder W,Lorensen B. The Visualization ToolKit(VTK)[EB/OL]. 2008. http://www.vtk.org/
猜你喜欢
安徽师范大学学报(自然科学版)(2022年3期)2022-07-14 03:54:42
赤峰学院学报·自然科学版(2021年4期)2021-06-24 23:17:10
中国电子科学研究院学报(2019年8期)2019-12-23 10:39:50
计算机与现代化(2018年2期)2018-03-13 07:23:35
制造技术与机床(2017年7期)2018-01-19 02:30:00
软件(2017年6期)2017-09-23 20:56:27
计算机测量与控制(2017年6期)2017-07-01 16:24:14
山西大同大学学报(自然科学版)(2016年6期)2016-01-30 08:29:12
长江大学学报(自科版)(2014年7期)2014-03-20 13:20:59
数学物理学报(2014年3期)2014-03-11 18:34:26
