基于P89LPC935的智能调平系统设计*
2012-04-26 02:59:18刘杰李德胜王颖陈佐龙
电气传动 2012年5期
刘杰,李德胜,王颖,陈佐龙
(1.中国人民解放军63861部队,吉林 白城 137001;2.中国人民解放军69224部队,新疆 库车 842000)
1 引言
调平是靶场许多大型精密测量设备正常工作的前提条件,调平精度直接影响其性能和总体精度。因此,固定站设备在初次安装及以后的使用中需要对基座进行调平,活动站设备在每次转场后都需要调平。目前,普遍采用数字式电子水平仪作为高精度平台(设备)的水平测量仪器,该仪器采用液晶屏数字显示,无声光指示。整个手动调平过程需要两人配合才能完成:一人既要观察水平仪数值的变化,又要转动设备以测量不同支点的倾斜角,进而判断支点的高低关系;另一人需要根据支点的高低关系用扳手来调节相应支点上的方头螺钉。正常情况下设备调平大概需要20min,如果点位地基倾斜严重,超出了设备的调平范围,经过长时间调整才能发现无法调平,无疑会延长设备准备时间。因此目前的调平程序复杂,需要反复调整,费时费力,对设备快速展开极为不利。
本文设计了专门针对三支点平台的智能调平系统,该系统以数字式电子水平仪、高性能单片机以及新型数码语音芯片为基本硬件架构,以三点确定一个平面的几何原理作为算法基础,实现了具有自动声光指示的高精度智能快速调平,彻底解决了设备快速调平的技术难题,提高了设备的测量精度和测控能力,同时也为调平技术应用探寻出一条行之有效的新路。
2 调平原理与系统功能
2.1 三支点平台调平原理
调平就是把测试设备工作平面的水平调整到该设备的精度要求范围之内,它一般是通过调整仪器设备支撑点上的可调垫铁来改变工作平面的水平。由于调整不同的支撑点,对其工作平面上各点水平的改变是不一样的,因此调整仪器设备的各支撑点,将会相互影响和干扰,使调整工作易出现反复[1]。
如图1所示,假设A,B,C是设备的3个支撑点(绕设备重心相差120°分布,以下简称支点),通过调整外部的方头螺钉可以调整设备平面的水平度。设备调平时,一般把水平仪放在设备平面上不动,靠转动设备来测量倾斜角。假设支点B和支点C不在同一条水平线上,起始时水平仪放在A点,如图1a所示,测得值a1;设备转动180°到A1点,如图1b所示,测得值a2;则支点B,C的水平误差为(a1-a2)/2。当水平误差为0时即认为支点B,C达到水平[2]。
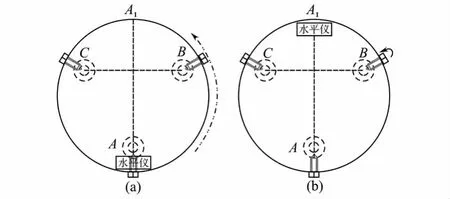
图1 三支点平台调平示意图Fig.1 Schematic of the leveling of the platform with 3points
因此,设备调平首先要判断A,B,C3个支点的大概高低关系;然后调节其中的2个支点到一个水平面上,这一过程需要转动设备至少2周,测量5次倾斜角,操作人员要计算水平误差;然后调整第3点和第1点或第2点水平,这一步又至少需要转动设备1周,测量两次倾斜角;最后还要确认3点是否已经调平。一般情况下,此时不可能调平(符合设备测量技术指标),还需要按上述步骤反复调平。
2.2 智能调平系统的功能
系统主要实现了以下几方面的功能。
1)对三支点平台的调平过程进行逐步声光提示:LED灯光指示待调整的支点,语音提示操作方法和待调整量。
2)整个调平过程,只需要转动设备2周,测5个点(次)的倾斜角,5min即可调整完毕。
3)开始调整后,根据调整情况,语音实时提示水平仪所在支点的水平误差(高差)。
4)如果地基倾斜过大,设备无法调平,系统及时提示“无法调平,请关机”,需要在设备底座上加垫片。
5)如果调整方向错误,及时提示“方向错误,请反转”。
6)如果调整过量,及时提示“调整过量”。
7)如果量程档位选择错误,及时提示“量程错误”,量程选择正确后才能正式开始调平。
3 智能调平系统的硬件设计
根据三支点平台智能调平设备的功能需求,设计中采用了数字式电子水平仪作为测量元件,选用新型、低功耗单片机P89LPC935作为核心处理器,通过MAX3232接口芯片读取水平仪的实时测量数据,由ISD1720数码语音芯片实时语音提示操作步骤以及调整情况,LED灯光指示系统的工作状态及待调整支点。系统的硬件原理框图如图2所示,主要由电子水平仪和智能终端2部分组成。智能终端包括单片机最小系统、语音电路、接口电路和电源电路。电子水平仪主要用来测量设备工作平面的倾斜角;智能终端由按键进行控制,通过RS232接口读取电子水平仪测量数据,经过处理后,由语音电路指示操作手操作,由LED灯光指示系统的状态和待调整的支点。
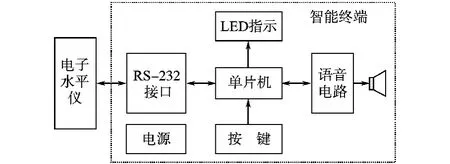
图2 系统硬件原理图Fig.2 Hardware schematic of the system
3.1 P89LPC935单片机简介[3]
整个系统的核心是NXP公司推出的高性能、微功耗、51内核微处理器P89LPC935,其运行速度是标准80C51的6倍。该单片机以先进的CMOS工艺制造,通过片内集成的丰富特性实现了非常高的性价比:可选的多时钟源(外部高/中/低频晶体及片内RC、WDT振荡器),增强型I/O端口(可配置为准双向/开漏/推挽/输入模式,20 mA高电流驱动,支持键盘中断,兼容3V/5V逻辑),5个定时/计数器,多个串行接口(UART/SPI/IC),模拟功能等。采用极小的TSSOP封装,提供了节电模式,有效地降低了系统的功耗。
3.2 语音电路
语音电路采用语音芯片ISD1720,该芯片采用模拟数据直接在半导体存储器中存储的技术,不需经过A/D和D/A转换,因此能够非常真实、自然地再现语音、音乐音调和效果声,避免了一般固体录音电路因量化和压缩造成的量化噪声。另外,该芯片还提供了多项新功能:包括内置专利的多信息管理系统、新信息提示(vAlert)、双运作模式(独立式和嵌入式)以及可定制的信息操作指示音效等。芯片内部还包含有自动增益控制、麦克风前置扩大器、扬声器驱动线路、振荡器与内存等的全方位整合系统功能。
该芯片使用简单、录放音方便,通过连接2个电阻、1个电容、1个扬声器即可构成高音质、声音自然的语音电路。用户利用振荡电阻可设定芯片的采样频率,从而选择芯片的录放时间和录放音质。在振荡电阻为80kΩ的情况下,ISD1720采样率为8kHz,可以存放20s的语音内容。ISD1720芯片将存储声音数据的空间分成若干段,每段都有一个独立的地址,通过段地址,可以删除某一部分存储空间,也可以播放或录制某一部分存储空间,这样就可以将不同段的声音连起来播放,组成相应的语句。
单片机通过4线(SCLK,MOSI,MISO,/SS)SPI协议控制ISD1720随机组合放音。SPI(serial peripheral interface:串行外围设备接口)是一种全双工、高速、同步的通信总线;具有2种操作模式:主模式和从模式,在主模式和从模式中,均支持高达3Mbit/s的速率;还具有传输完成标志和写冲突保护标志。本系统为单主单从模式,单片机作为主机,ISD1720作为从机。指令数据以数据队列的形式从 MOSI(主机输出从机接收,SPI接口的串行输出端)移入ISD1720,第一个移入的字节是命令字节,这个字节决定了紧跟其后的数据类型;与此同时,芯片状态、当前行地址以及其它数据信息以数据队列的方式通过MISO(主机接收从机输出,SPI接口的数据输入端)被返回主机。SCLK是SPI接口的时钟,由单片机产生,并且被用来同步芯片MOSI和MISO端各自的数据输入和输出,此管脚空闲时,必须拉高。/SS是从机选择管脚,当其为低电平时,该芯片作为当前被控设备并且开启SPI接口,空闲时,此管脚需要拉高。
为了降低噪声、提高音质,在印制板电路设计时要确保语音电路的数字地(vssd)、模拟地(vssa)、扬声器驱动器地(vssp)单点接地;同时,数字电源(vccd)、模拟电源(vcca)、扬声器驱动器电源(vccp)也要单点与系统电源VCC相接。
3.3 接口电路
接口电路实现单片机和水平仪之间的串行通信。P89LPC935集成有增强型通用异步接收/发送器(UART):具有波特率发生器、间隔检测、帧错误检测、自动地址检测等功能。P89LPC935的串口模块自带有一个波特率发生器,其不仅可以精确地产生串口通信所需的波特率,而且可以有效地节省系统资源,通过写入BRGR1,BRGR0即可得到特定的波特率。以下为波特率计算公式:

本系统的波特率设为9 600bit/s,取7.372 8 MHz的晶振,得:

3.4 电源电路
为了降低功耗,P89LPC935的操作电压VDD范围为2.4~3.6V,而本系统直接使用水平仪的电源(由干电池产生6V左右的电压),为此,采用了三端正向电压调节芯片HT7533来产生3.3V电源。HT7533非常适合电池供电的应用:功耗低、压差低、良好的温度稳定性、最高输入电压为24V、最大输出电流为100mA、封装尺寸小。该芯片使用非常简单,仅需几个滤波电容即可。
语音芯片发音时功耗较大,为了减小电压波动对单片机的影响,采用与HT7533同系列的HT7550产生5V电源,作为语音电路的独立电源。
4 智能调平系统的软件设计
按以上分析和硬件原理图,软件部分主要涉及与水平仪通信、控制语音芯片放音、判断3个支点的相对高低关系、判断能否调平、判断调整方向对错、是否调节过量以及是否调平等子程序模块。系统软件采用汇编语言编写,其流程如图3所示,带双引号的内容为系统提示语音,#1,#2,#3表示支点序号,XX,YY为数字(单位:角秒)。
系统上电复位后首先初始化各端口以及WDT,UART和SPI,然后等待用户按键确认,图3中软件流程比较清晰,这里就不再赘述。以下主要叙述如何进一步降低系统功耗和如何使用看门狗功能。
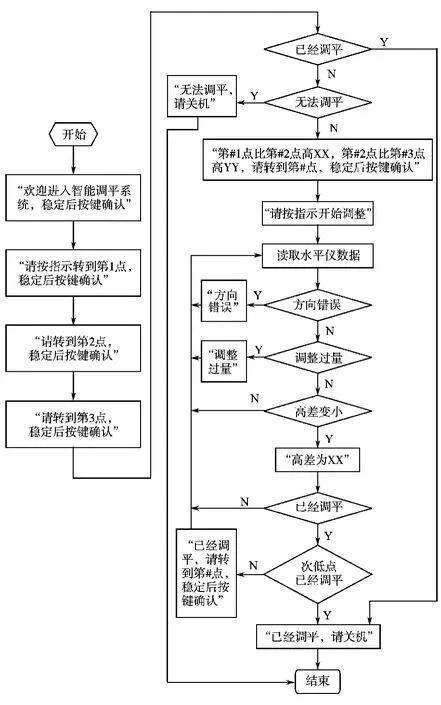
图3 系统软件流程图Fig.3 Flow chart of the software of the system
该单片机提供几个可由用户选择的振荡器选项来产生CPU时钟[3]。这些选项在对FLASH进行编程时配置,包括片内看门狗振荡器、片内RC振荡器、使用外部晶振的振荡器或外部时钟源,本系统采用片内RC振荡器。通过配置分频寄存器DIVM可进行高达510分频来提供CPU时钟,该特性可使CPU暂时以较低频率工作以降低功耗。系统在等待用户按键确认时通过分频,CPU时钟以14kHz运行,CPU仍保持对事件的响应能力但功耗大大降低,当用户按键确认后系统又恢复到7.373MHz的频率运行。另外,通过置位AUXR1寄存器的CLKLP位也进一步降低了功耗。
该单片机还嵌有内部WDT(watchdogtimer:看门狗)[3]:当软件没能在定时器溢出之前将其清零,WDT定时器就会导致系统产生一次复位,使系统从错误的操作中恢复。WDT具有一个独立的振荡器,频率标称为400kHz。WDT主要包括1个控制寄存器(WDCON)、1个装载寄存器(WDL)和2个看门狗清零寄存器(WFEED1,WFEED2)。WDCON 控制着 WDT 的开/关、WDT的时钟源预分频值和溢出时是否使能WDT使器件复位;WDL中存放数值,在每次看门狗溢出或执行清零序列时装入8位倒计数器;WFEED1,WFEED2主要在清零序列上使用。首先要对WDT初始化:
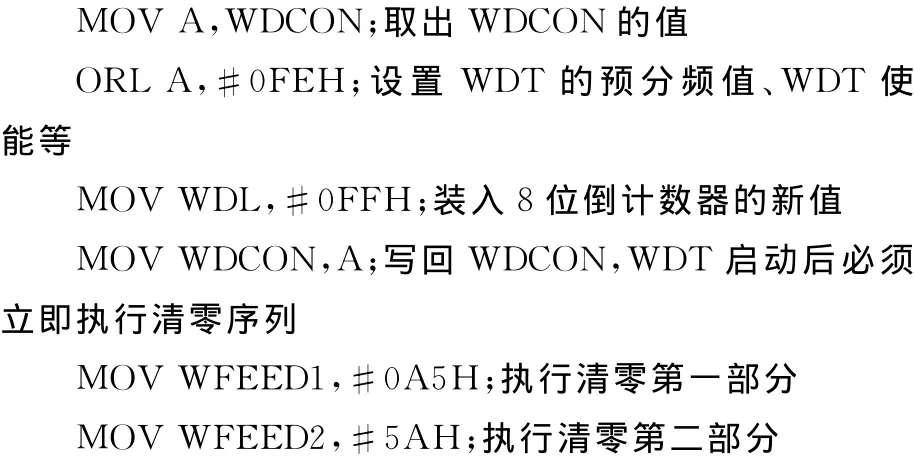
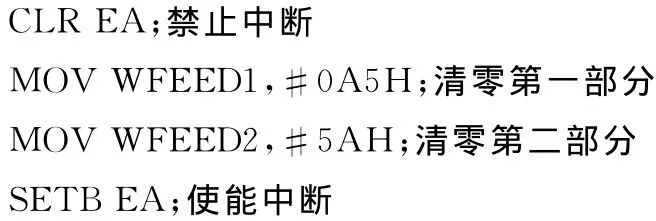
上述程序中,WDCON和WDL并不直接由用户装载,用户对 WDCON和 WDL进行写操作,但在清零序列结束时才装入WDCON寄存器和WDL倒计数器。为了避免WDT复位,WDT必须定时进行清零。下面是一个清零序列实例:
5 结论
基于单片机P89LPC935设计的智能调平系统结构简单、价格低廉,使用方便快捷、稳定可靠、调平精度高,解决了大型测量设备调平程序复杂的难题,提高了设备测量精度,能以最少的步骤快速调平设备,提高工效70%以上。该成果已获得国家实用新型专利,并在多项靶场试验任务中成功应用;同时,在其他精密测量及光、机、电一体化技术中也具有广阔的应用前景。
[1] 欧同庚,王琪,傅辉清,等.水平面基准系统的自动调平方法研究[J].大地测量与地球动力学,2008,28(5):129-132.
[2] 青岛奥得森(中美)电子有限公司.DEG系列电子水平仪使用说明书[Z].[2010-03-05].http://www.audson.com.
[3] P89lpc935product data sheet.[2010-02-05].http://www.zlgmcu.com.
修改稿日期:2011-12-30
猜你喜欢
中国民间疗法(2021年5期)2021-06-09 09:21:08
小学阅读指南·低年级版(2020年11期)2020-11-16 07:00:53
机械工程与自动化(2020年4期)2020-08-25 02:06:58
质量技术监督研究(2018年6期)2019-01-15 03:03:56
森林工程(2018年4期)2018-08-04 03:23:38
测绘工程(2018年1期)2018-01-09 06:02:46
制造技术与机床(2017年8期)2017-11-27 02:10:09
航天工业管理(2017年4期)2017-05-12 01:16:35
快乐语文(2016年7期)2016-11-07 09:43:55
中学课程辅导·教学研究(2016年35期)2016-04-10 07:45:26