
皮带自移机尾自动调平策略研究
2020-08-25 02:06:58闫建伟
机械工程与自动化 2020年4期
刘 震,李 洋,闫建伟
(宁夏天地奔牛实业集团有限公司,宁夏 石嘴山 753001)
0 引言
皮带自移机尾是综采工作面的重要输送设备,在煤炭开采过程中承担着顺槽转载机与皮带输送机的衔接,其可靠性及其操作的便利性直接影响井下运输的畅通性和高效性。由于井下巷道地面的不平整性等原因,使得皮带自移机尾在向前推进过程中机身发生倾斜,进而导致调平油缸损坏、皮带输送机的输送带发生跑偏等问题,影响转载机和皮带输送机的正常运行。因此皮带自移机尾在实际工作过程中常常需要人为调整各调平油缸的高度,使皮带自移机尾机身调平。目前井下对皮带自移机尾的调平通常是手动操作,整个调整过程中需要操作工人人为判断设备当前状态,然后根据经验控制各个调平油缸的伸缩进行调节,不但存在对皮带自移机尾是否需要调平的误判,而且调节操作过程存在耗时较长、调整不准确的问题。这种调平方法精度较低、耗时较长、工作人员的工作量较大,影响整个综采面的工作效率,也不利于井下设备自动化、智能化的发展[1]。随着井下煤炭开采对设备的自动化、智能化、高精度、高产高效要求的逐渐增高,手动调平方法已经不能满足井下相关设备的发展要求,因此实现皮带自移机尾自动调平是对自移机尾的一次提升。本文分析了皮带自移机尾的自动调平原理,提出了基于本安型控制器、倾角传感器、位移传感器和电磁先导阀的自动调平策略。
1 皮带自移机尾自动调平控制原理
皮带自移机尾主要由抬高架、机头架、机尾架、中间架、导轨、小车及调平油缸、侧移油缸、推移油缸和滑靴等组成,同时配备有液压控制系统,其结构示意图如图1所示。
皮带自移机尾自动调平控制是由控制器通过传感器反馈的机身参数判断目前机身所处状态,然后对数据进行逻辑计算,通过对电磁阀发出控制指令控制机头尾的4个调平油缸的伸缩来调节机头架、机尾架、中间架三部分的姿态使之达到调平效果。自动调平控制系统结构框图如图2所示。

1-抬高架;2-机头架;3-调平油缸;4-推移油缸;5-小车;6-导轨;7-中间架;8-机尾架;9-侧移油缸;10-滑靴
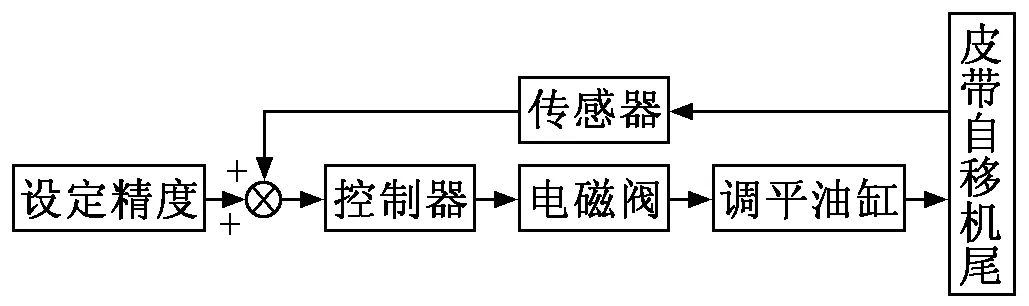
图2 自动调平控制系统结构框图
2 自动调平策略
目前大型平台的调平策略主要有位置误差控制调平策略和角度误差控制调平策略两种。位置误差调平策略是通过控制调平油缸的伸缩使调平油缸的高度一致的方法实现调平。位置误差控制调平策略可根据所选基准的不同分为最高点不动调平策略、最低点不动调平策略和中间点不动调平策略。角度误差调平策略是通过不断调整调平油缸伸缩长度来控制机身倾角的变化实现调平。结合皮带自移机尾的机身结构和控制系统特点,单独采用位置误差控制调平策略或者角度误差控制调平策略都不能达到很好的调平效果,需要将两种策略相结合重新组合成一种策略。由于皮带自移机尾机头、机尾和中间架的连接属于非刚性连接,调平油缸在机头、机尾各两个。因此为获得更准确的机身倾斜角度数据和调平油缸的位移数据,需在4个调平油缸内安装磁致伸缩位移传感器,中间架上安装一个双轴倾角传感器。
自移机尾是在顺槽转载机与皮带输送机处于运行状态下完成推移动作,为不影响顺槽转载机与皮带输送机的正常运行,要求皮带自移机尾整个调平过程应尽量平稳、迅速地完成。因此控制器在对皮带自移机尾机身调平过程中,应在最短的时间内使机头架和机尾架在X方向(左右方向)调平,防止由于机身倾斜导致输送带发生跑偏,然后进一步调整机头架和机尾架使Y方向(前后方向)调平。所以应将位置误差调平策略中的最高点不动策略与角度误差调平策略相结合的策略作为皮带自移机尾的调平策略,具体自动调平流程如图3所示。
3 结束语
针对皮带自移机尾独特的结构特点和工况条件,阐述了一种符合其自动调平的调平策略。该策略在理论上可有效地缩短自动调平的时间,使整个调平过程更加平稳、更加精确。增加传感器可对皮带自移机尾机身姿态进行实时监控,为设备的智能化奠定基础。
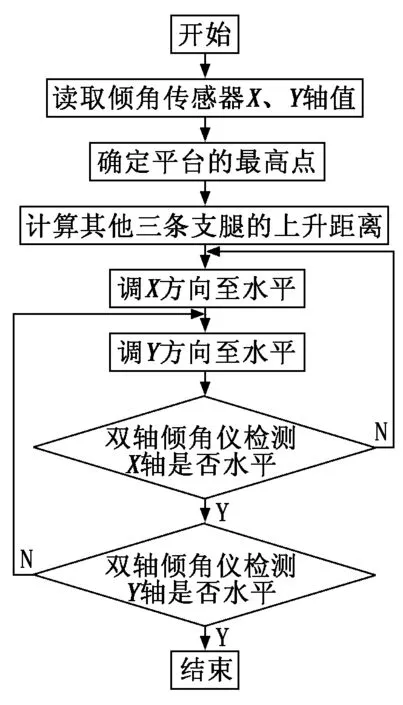
图3 皮带自移机尾自动调平流程
猜你喜欢
现代仪器与医疗(2021年5期)2021-12-02 02:11:28
锻压装备与制造技术(2021年3期)2021-08-13 08:40:14
中国民间疗法(2021年5期)2021-06-09 09:21:08
山东煤炭科技(2021年4期)2021-05-13 08:30:16
森林工程(2018年4期)2018-08-04 03:23:38
航天工业管理(2017年4期)2017-05-12 01:16:35
中国塑料(2015年6期)2015-11-13 03:03:14
四川党的建设(2014年9期)2014-08-23 01:33:22
中国设备工程(2014年1期)2014-02-28 13:43:27
当代矿工(2012年11期)2012-03-29 11:26:14
