双PLC技术在多轴运动控制中的应用
2012-09-22 03:20:00,,,
电气传动 2012年5期
,,,
(上海理工大学 机械工程学院,上海 200093)
1 引言
馆外智能图书馆是为读者提供本地图书借阅和预约等服务的图书馆自助服务终端。馆外智能图书馆的结构见图1。由图1可知该系统的机械部分划分为:智能书架和图书吐纳设备2部分。其中智能书架部分主要功能是图书存储,并为借还书提供取放书服务。图书吐纳设备主要提供以下2种功能:1)将从智能书架上取出的图书传递给读者;2)将读者归还的书传递给智能书架的机械手,以便将图书放回书架,供其他读者借阅此书。从它们各自的功能和整个系统的功能可以看出,两部分之间既在功能上独立,同时又需要相互协调完成部分功能,如当读者发出借书指令后,首先由书架部分的机械手将相应的书从书架上取出,然后传递给图书吐纳设备,在这个过程中需要相互的位置协调,再由图书吐纳设备将书提供给读者。为实现这些功能,该系统的运动部分被设计为具备5个运动轴的多轴系统。其中智能书架部分包含4个运动轴:机械手前后运动轴,机械手上下运动轴,机械手旋转运动轴以及机械手伸缩运动轴。而图书吐纳机构包含的运动轴为书盒翻转运动轴。
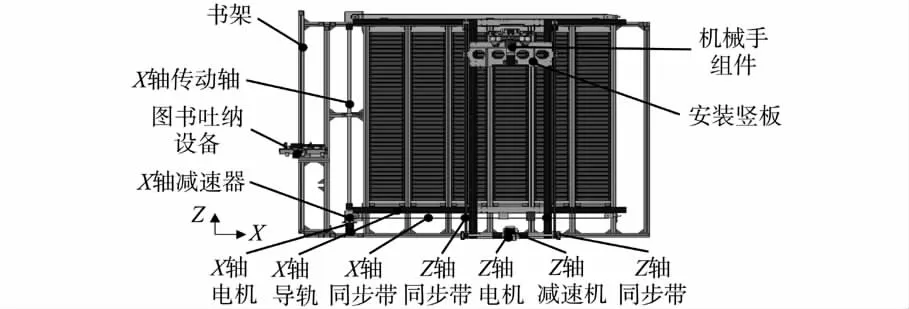
图1 馆外智能图书馆结构Fig.1 The structure of the outside intelligent library
本文根据该系统的特点和控制要求,结合永宏PLC在运动控制中的先进理念设计了基于永宏FBs-32MC系列PLC的双PLC多轴运动控制系统。
2 多轴运动控制方案分析
所谓多轴运动控制泛指运动控制轴在两轴及以上的运动控制系统。目前市面上的大部分小型PLC都能够支持本机4轴控制,这其中以松下的FX系列PLC和永宏的FBs系列PLC为典型代表。这类PLC的出现给一般的多轴运动控制带来了方便的同时也大幅降低了多轴系统的控制成本,因此关于4轴及以下的运动控制不在本文的讨论范围内。本文主要讨论了5轴及以上的多轴运动控制系统,并结合馆外智能图书馆的运动控制系统给出了一个5轴运动控制系统的实例。
在采用小型PLC的多轴运动控制系统中,为解决本机控制能力不足问题,可采用以下几种方法实现:PLC扩展运动控制模块,PLC组成多机网络,采用总线型伺服系统等方法。这些方法各有优缺点,通过比较,在馆外智能图书馆多轴运动控制系统中选取了PLC组成多机网络的方法来实现多轴运动控制。
在由永宏PLC组成的多机网络型多轴控制系统中,为实现多轴控制可采用以下2种方法:1)2台PLC作为对等PLC,即两机各自独立完成相应的运动控制功能,彼此间通过数据通信实现相关信息的传递,或者通过地方三方传递参数的方式实现信息共享,这种方法几乎被目前市面上所有类型的PLC所支持,是一种通用的控制策略。2)以一台PLC作为主PLC,另一台作为从PLC,实现运动轴的扩展。在该系统中所有的运算逻辑都在主PLC中完成,而从机仅仅担负脉冲输出的功能,两机之间采用主机中内建的高速联机指令通过内存共享来实现信息传递。永宏PLC采用独特的运动控制指令表格方式实现运动控制功能,使得程序开发人员能够在主机中像操作本机运动控制功能一样实现对从机运动控制功能的使用。这给程序开发提供了方便,同时也减少了开发工作量,在这样的系统中基本上不需要双机联调。通过比较分析并结合系统自身特点在馆外智能图书馆控制方案选取过程中最终采用第2种方法。该系统的双机网络如图2所示,同时需要指出的是,该网络最多可满足8轴运动控制的需要。
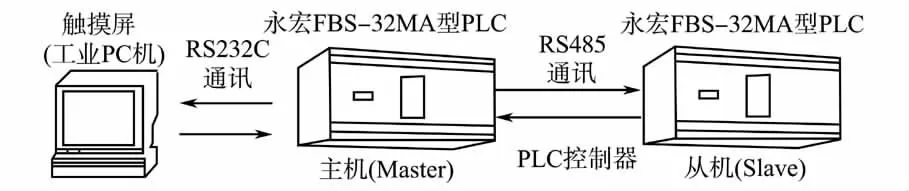
图2 智能图书馆的控制网络Fig.2 The control mesh of the intelligent library
3 控制方案设计
3.1 永宏PLC运动控制基础
与其它PLC采用指令驱动的运动控制方式不同,永宏PLC在处理运动控制过程中采用一种表格驱动方式。该方式也是其在处理诸如通信等大数据量指令中的一种普遍方法。采用该方式为程序员灵活配置运动控制方案提供了方便,本文将基于该表格展开讨论。一般利用永宏PLC实现运动控制需要经过硬件组态,参数表格配置,运动控制表格配置,相关指令启动几个步骤。
3.1.1 永宏PLC运动控制的硬件组态
为了利用永宏PLC的高速定位指令实现定位控制,首先需要对脉冲输出通道进行硬件组态。该工作可以通过程序组态软件WinProladder完成。WinProladder是永宏公司提供的一个功能强大的PLC梯形图程序开发平台,同时通过该平台可以完成系统开发过程中所需要的所有软硬件资源的组态工作。其中为了实现运动控制需要做的硬件组态工作为把相应的输出端口配置为脉冲输出模式,并对脉冲的形式进行配置。该工作通过调用系统提供的I/O组态工具的输出设定模块完成,其操作界面如图3所示。
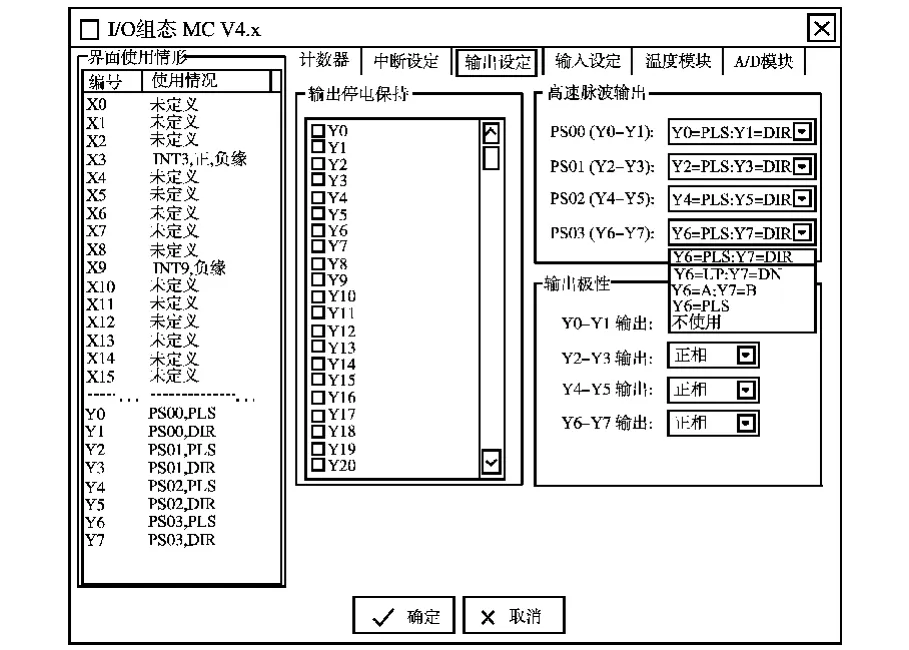
图3 I/O组态工具Fig.3 The I/O configuration tool
由图3可知,对一个高速脉冲输出通道的设置主要是指定端口输出脉冲的形式,共有4种,这使得系统能够更加灵活地适应外部被控对象的硬件接口,本系统选择了PLS+DIR信号的形式。而输出脉冲极性指的是输出正转脉冲信号时方向信号的电平状态,在这里采用默认值。该功能主要应用在当外部执行器不能通过参数设置改变运转方向的场合。在完成了硬件组态以后便是对参数表格进行配置。
3.1.2 永宏PLC运动控制的参数驱动表格
在利用PLC实现运动控制时,常常会希望在指定位置或速度参数的时候能够执行机构相应参数的度量单位一致,通常情况下为了实现这一目标必须在程序里面进行大量的数学运算才能达到这个效果,而为了实现加减速的控制则必须编写复杂的加减速程序或进行大量的特殊寄存器的配置,这对一般的程序员来说显得极不方便。永宏PLC基于表格的配置模式使得这一切变得非常容易。通过对一种被称之为“伺服参数表格”的参数集进行配置可以方便地实现以上功能及其它一些附加功能。如对位置参数单位的设置,位置倍率设置,最大速度限制,加减速时间设置,以及与建立参考点的有关的输入信号的相关信息配置等。特别是最后一个配置使得建立系统参考点的工作变得十分容易,当完成该配置以后,只需要在程序中使用相关指令并根据实际的运动模型正确配置相关模式便可轻松实现该参考点建立的功能。
一般情况下PLC系统会提供一个默认的伺服参数表格,如果程序员对相应的参数不进行配置,系统将会按照默认表格参数进行相关处理。要获取默认表格的参数可以通过查阅手册或在Win Proladder建立一张伺服参数表格的方式实现。当该表格不能满足应用需要时,可在建立伺服参数表格后对相关的参数进行配置,以满足应用的需要。关于如何配置限于篇幅在此不作说明。参数表格的建立只是为配置相关参数准备数据源的一个过程,为把这些参数和需要配置的通道建立起对应关系,还要在程序中调用FUN141(MPARA)指令来指定所建表格和对应通道的关系。值得指出的是,该指令一旦出现在梯形图中,只要不出现语法错误,在梯形图扫描的每一个周期,它都会被执行,即默认其使能信号被一直认为有效,图4给出了在馆外智能图书馆程序中使用的伺服参数表格及FUN41指令应用的一个示例。
在完成了以上工作后,便可以通过配伺服命令表格来建立相应的运动控制方案。
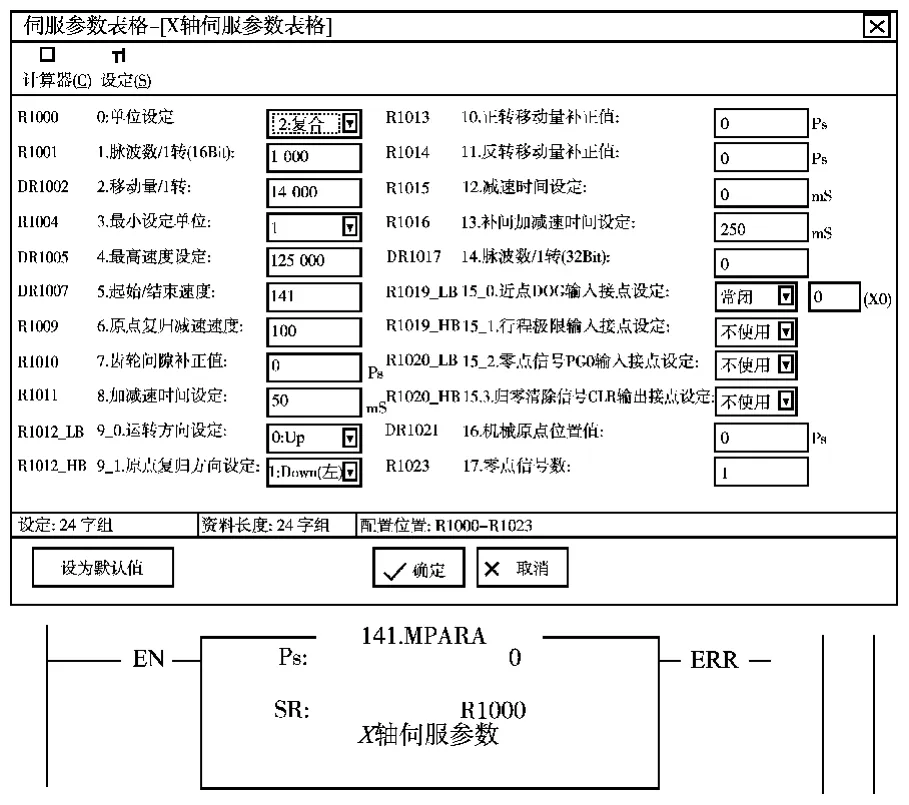
图4 伺服参数表格及FUN41示例Fig.4 Sheet of servo parameter and the example about FUN41
3.1.3 永宏PLC的脉冲指令及运动控制表格
永宏PLC内建高速脉冲输出指令FUN140(HSPSO)运作过程中主要需要以下3个参数:1)脉冲输出通道Gp,可取值为0~3,分别代表了4个不同的脉冲输出通道。2)SR定位程序表格寄存器起始地址即相应控制方案的师傅命令表格的首地址,该寄存器集的前两个用于说明表格的类型和定位程序的步数,最多支持256步,每步占用9个寄存器分别定义了定位过程中所需要的脉冲输出速度,目标位置计算方法(相对计算/绝对计算),目标位置,目标位置倍率(这个需要对应的伺服参数表格中的3号参数:最小单位设定配合),以及定位步骤之间的转移条件等。3)指令运算采用寄存器组,该寄存器组由连续的7个WR数据寄存器构成,其中WR+0寄存器标明了程序当前正在运行的定位步骤或当前暂停步骤,这使得程序员可以通过对该寄存器的操作来跳过程序控制过程中在特定情况下无须执行的步骤。第2个寄存器WR+1指明了由SR所确定的定位程序的总步数和指令的当前执行情况,可以按位寻址,来判断指令执行的结果、异常执行中,单步完成等。其具体涵义见表1。
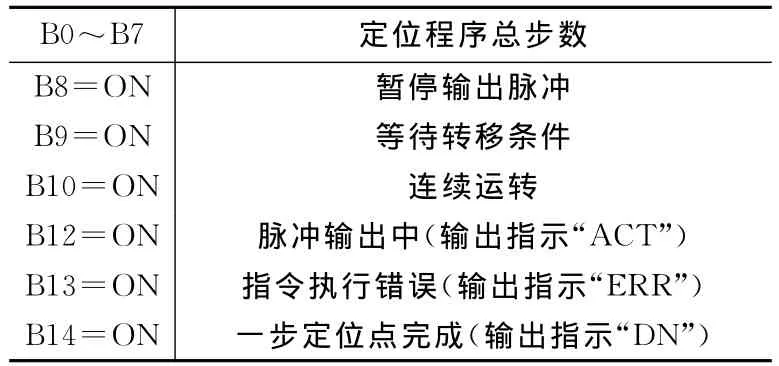
表1 FUN140运行参数WR明细Tab.1 WR particular operating parameter about FUN140
图5为一个利用该指令开发的运动控制轴实例。
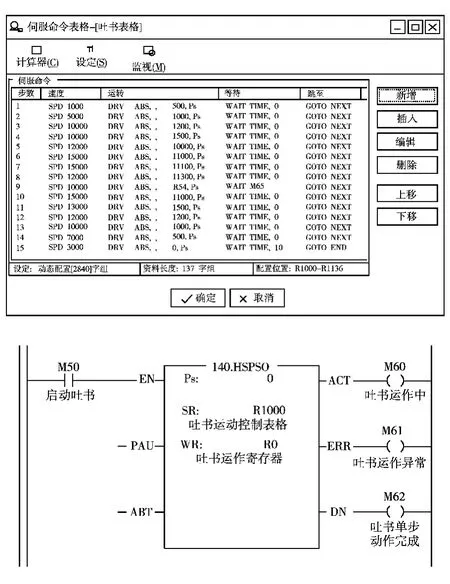
图5 利用永宏FUN140指令开发顺序定位程序Fig.5 Use the FATEK FUN140instruction to develop the program of sequential location
3.2 馆外智能图书馆的双PLC系统的实现
基于前述特点,在智能图书馆的控制系统中通过以下方法实现了运动轴控制的扩展。首先,为了能够实现控制参数的传递需要建立主从机内存单元的内容映射,这一功能是利用高速联机指令FUN151(CLINK)实现的,具体的映射关系见表2。
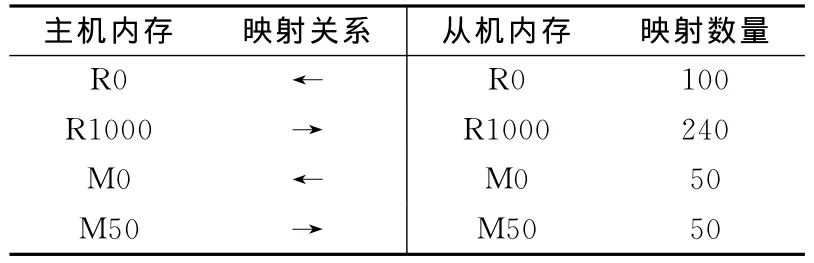
表2 智能图书馆中的主从数据映射Tab.2 The data mapping of principal and subordinate about the intelligent library
指令FUN151(CLINK)也是基于表格执行的,在该系统中用于实现内存映射的指令表格和程序如图6所示。
在建立了映射关系以后就可以在主机中通过建立相应的定位程序表格,可以像控制本机的脉冲输出通道一样来控制从机的脉冲输出通道,从而实现所需要的定位功能。
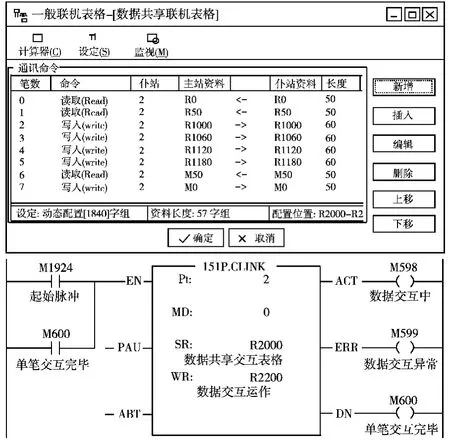
图6 数据共享表格与相关程序Fig.6 The data sharing form and relative program
在本系统中涉及的一个通过主从即实现控制轴的控制表格和程序(见图6),R1000作为从机定位表格的起始地址,M50作为启动定位的标志位,指令运作标志寄存器为R0起始的连续7个单元,主机通过R1的位解析来获取当前定位指令的执行情况,并给出必要的步间转移条件,作出其它相应处理,从而实现了图书吐纳机构的吐书动作。关于还书动作的相关配置限于篇幅在此就不加说明了。
4 结论
基于该方法实现的多轴运动控制系统很好地满足了馆外智能图书馆的控制要求。但在程序开发的同时也注意到采用该方法需要占用主机较多的内存单元来实现定位控制,同时也增加了主机的运算量,在进行简单扩展时能够满足系统对控制系统的性能要求,但在大型系统中若需进行运动控制还是不宜采用该方法,第一种扩展模式是一种比较理想的处理方法。
[1]周晶晶,蔡锦达,钱炜,等.自助式图书借还装置[J].机械制造,2010,48(11):37-39.
[2]永宏电机股份有限公司.FBs-PLC使用手册[Z].2006.
[3]王学军.多轴运动控制系统的控制方式[J].电子工业专用设备,2002,31(3):163-166.
[4]付玉升.一种实现多轴控制的经济解决方案[J].制造技术与机床,2004(3):19-20.
猜你喜欢
现代临床医学(2022年1期)2022-02-12 02:04:26
河北农机(2020年10期)2020-12-14 03:13:42
计算机应用(2020年5期)2020-06-07 07:06:44
文化创新比较研究(2020年14期)2020-01-02 19:25:56
文化创新比较研究(2020年10期)2020-01-02 02:10:07
文化创新比较研究(2020年13期)2020-01-01 06:17:02
单片机与嵌入式系统应用(2017年7期)2017-07-31 21:57:23
凿岩机械气动工具(2017年2期)2017-07-19 10:21:13
工业设计(2016年11期)2016-04-16 02:49:22
中国铸造装备与技术(2015年5期)2015-12-10 10:23:41