微小高度检测系统设计*
2012-03-20 04:29李京展车英唐博于远航张书瀚杨铭卢毅孙浩
光学仪器 2012年3期
李京展,车英,唐博,于远航,张书瀚,杨铭,卢毅,孙浩
(长春理工大学 光电工程学院,吉林 长春 130022)
引 言
光学三维形貌测量具有非接触性、高准确度和高分辨力的特点,在反求工程、在线检测、医疗检测、机器视觉等领域有着广泛的应用,被认为是最有前途的三维形貌检测方法[1]。在利用光学成像原理测量物体表面形貌的方法中,常用的有移像法[2]、相息图法[3]、光切法和莫尔条纹法[4]等,其中莫尔条纹法应用较多,其原理是利用平行光照射光栅,将光栅成像在被测物体上形成变形光栅,变形光栅便携带了物体的三维形貌信息。在观察侧再用透镜对变形光栅成像,在变形光栅像的位置放置参考光栅,便可以在参考光栅表面看到莫尔条纹,通过分析莫尔条纹就可以得到物体的高度信息[5,6]。但是该方法在测量的高度值很小的时候,不同级次的条纹的像容易混淆。
文中在莫尔条纹法的基础上,提出了利用白光照射等间距的条纹板,设计了投影光学系统,实现条纹的像等间距地投射到被测物体上,再利用照相系统将等间距的像成像在CCD上,通过对CCD上像的处理,可以还原出高度信息,实现对微小高度的测量。
1 系统的组成及原理
1.1 系统的组成和实现过程
系统组成如图1所示。
图1中黑色表示亮条纹,白色表示暗条纹。A、A′分别表示条纹板同一狭缝投影投影到基板上的亮条纹或者投影到焊点上的亮条纹,B表示条纹板其他狭缝投影到基板上的亮条纹。
该系统是由等间距的条纹板,投影系统,照相系统组成。通过平行光照射条纹板使其发光,将其作为投影系统的物,投影系统需要相对基板倾斜放置,将条纹板的像等间距地投射到基板上。照相系统相对基板垂直放置,将经过物体高度调制的亮暗条纹再次成像在CCD上。然后对CCD接受到的条纹图像进行分析,便可得到焊点的高度值。
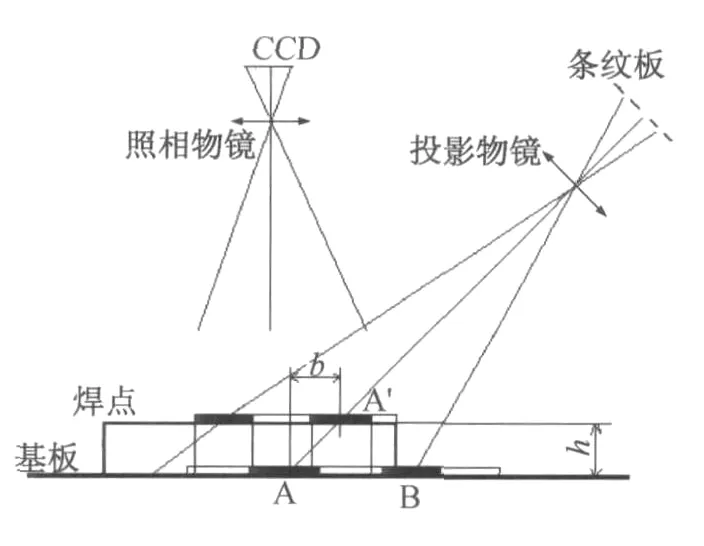
图1 系统组成图Fig.1 System components map
1.2 系统的原理
投影系统将条纹板的亮暗相间像等间距地投射到被测物焊点上,受到焊点高度的调制作用形成错位的亮暗相间条纹,再由照相系统将亮暗相间的条纹成像在CCD上。CCD上得到的条纹图像便携带了焊点的高度信息。经过图像处理,可以分析出焊点的高度值。
为实现对高度的测量,基板上的亮暗条纹需要满足:
(1)对于同一个焊点高度h,条纹板上同一条狭缝投影到基板上形成的条纹A与投射到焊点上形成的条纹A′不能完全互相重叠。
(2)条纹板上不同两条狭缝A和B的投影不能互相重叠。
设基板上的条纹宽度为D,条纹重叠宽度为d,A和A′相对基板所在水平面的投影间隔为b。根据以上两个条件,分辨情况如图2所示。
图2中黑色表示亮条纹,白色表示暗条纹,A、B两点分别表示不同的两个狭缝投影的焊点上的亮条纹的中心点。图中经焊点调制作用后的条纹发生错位,调制后的条纹图中,内部黑线框里面表示的是基板上焊点调制后的条纹,外面表示的是基板上的未被调制的条纹。图中最下面给出了三种分辨情况,其中前两种是两种极限情况,即不能分辨和最佳分辨;第三种是介于两者之间的情况,该情况也能完成分辨。

图2 分辨情况图Fig.2 Resolution situation map
2 光学系统的设计
2.1 设计要求
测量高度范围:h=0.09~0.10mm; 测量最大面积:500mm×500mm;
每次测量面积:≥20mm×20mm。
2.2 基板上亮暗条纹宽度关系的确定
根据图1所示,b是投影系统的投射光线与基板倾角α和焊点高度h的函数:

为满足对于同一个焊点高度h,条纹板上同一条狭缝的光线投影到基板上形成的条纹与投射到焊点上形成的条纹不能完全互相重叠以及条纹板上不同两条狭缝的投影不能互相重叠,b、D、d、α之间需要满足如下关系:

由式(2)得:

由式(3),取不等式两端值作比较得

式(4)是投影到基板上的条纹间距相同时推导出来的条纹间距与条纹重叠部分宽度的关系式。综合考虑投影光学系统和图像处理的难度等因素,选定d=0.5D。
设需要测量的基板上的条纹的移动范围值为K,则有

根据式(5)选取不同的D值,进而可以确定在选定的D值下的K的取值范围,也即是条纹在此移动范围内可以根据条纹图分析出焊点高度。再根据精度的要求以及两个光学系统的设计难度,选取D=10μm。然后根据所取的D值和选定的d=0.5D,以及100/(D+d)≤tanα≤90/(D-d)可计算出α角,结果如下:D=10μm,5μm ≤K≤15μm,81.47°≤α≤86.82°。
2.3 投影光学系统设计
根据前面计算得到的D取10μm时,d=5μm。考虑到衍射的影响,条纹板的线宽度不能做到无限小,取条纹板的最小线宽为l=2.5μm[7]。在波长为0.555μm的情况下,参考鉴别率版空间频率公式:N=1000/2l(lp/mm)[8](其中l为鉴别率板线宽),可得系统的空间频率为 N=200lp/mm。根据理论分辨力:N=D/1.22λf′[8],计算得投影系统的F=7.375,β=y′/y=-4,再取α角为84°进行设计光学系统,将物面设成倾斜的平面,使系统保证各个视场的放大倍率都相等,实现投影条纹亮暗间隔相等。
系统设计结果如下:
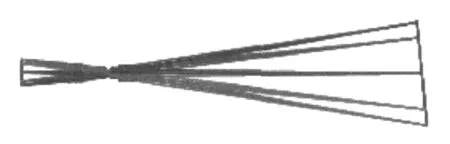
图3 系统外形结构图Fig.3 The schematic of optical system structure

图4 系统的点列图Fig.4 The spot diagram of the system

图5 系统的点扩散函数Fig.5 The PSF of the system map

图6 系统的能量分布曲线Fig.6 The radial energy distribution of the system
由以上各图可知,光学系统设计时实现了在像面相对光轴倾斜84°的情况下,点列图均方根半径最大值为7.169μm,在衍射极限32.3μm以内。由点扩散函数可以看出,经光学系统的衍射像的光强分布集中程度很高。由系统能量分布曲线可知,在衍射极限7.169μm范围内的能量大约占总能量的80%左右。经以上分析可以说明该系统满足使用要求。
3 结 论
针对焊点高度的检测,提出了一种检测装置的设计方法,并设计了该检测装置的投影光学系统部分。该系统实际讨论了如何对高度信息进行测量,以及根据设计要求,如何确定投影系统的参数,并完成了设计。解决了目前对微小高度测量方法中存在的由于投影条纹亮暗间距不等给图像处理过程带来的难题,实现了测量范围大、重复性好、图像处理简单的优点,为反求工程、在线检测、医疗检测、机器视觉等领域中对微小高度的测量提供了新方法。
[1]李永怀,冯其波.光学三维轮廓测量技术进展[J].激光与红外,2005.35(3):143-147.
[2]徐建强,王蕴栅.三维形貌测量的扫描相移法研究[J].光子学报,2005,33(10):1210-1212.
[3]曹召良,胡五生.液晶相息图用于光学检测[J].光子学报,2006,35(12):1941-1945.
[4]段存丽,陈 芳,祁瑞利,等.利用莫尔条纹测量物体三维形貌新方法研究[J].光子学报,2008,37(7):1425-1427.
[5]曾爱军,王向朝.基于光栅成像投影的微位移检测方法[J].中国激光,2005,32(3):394-398.
[6]伏燕军,杨坤涛.三维形貌测量的莫尔条纹的理论分析[J].光电工程,2006,33(7):63-66.
[7]杨志文.光学测量[M].北京:机械工业出版社,2009:171-177.
[8]郁道银,谈恒英.工程光学[M].北京:机械工业出版社,2005:146-147.
猜你喜欢
发光学报(2022年7期)2022-08-05
高师理科学刊(2016年8期)2016-06-15
科技创新导报(2016年1期)2016-05-30
中国塑料(2016年7期)2016-04-16
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
焊接(2016年2期)2016-02-27
华东理工大学学报(自然科学版)(2015年4期)2015-12-01
物理与工程(2014年4期)2014-02-27
河南城建学院学报(2014年6期)2014-02-27
机械制造文摘(焊接分册)(2013年1期)2013-03-20