双马赫-曾德尔型干涉仪定位技术研究*
2012-03-20 04:29潘岳,王健,2
光学仪器 2012年3期
潘 岳,王 健,2
(1.杭州电子科技大学 电子信息学院,浙江 杭州 310018;2.聚光科技(杭州)股份有限公司,浙江 杭州 310052)
引 言
针对光纤干涉型分布式传感系统可用于微弱行为探测的重大前景,国内外提出了很多不同结构的干涉型分布式光纤传感技术[1],包括:双萨克纳克[2-3]、萨克纳克和马赫-曾德尔[4-5]、萨克纳克和迈克耳逊[6]、双马赫-曾德尔[7-9]等混合组成的干涉型分布式传感结构。在以上光纤干涉型分布式传感系统中,双马赫-曾德尔型传感系统因其较优越的定位性能和较低的成本,一直受到较多的关注。国际上已经制造出基于此项技术的成熟的产品,如澳大利亚的FFT公司和美国的Optellios公司的电子光纤围栏产品,探测距离达到80km以上,定位精度达到10m;而Fiber Sensys公司制造的输油管道预警传感器,探测距离更是达到130km。但国内的研究一直处于起步的阶段,研制的双马赫-曾德尔型传感系统的定位不稳定,缺乏可靠性。基于此,现搭建了一套双马赫-曾德尔干涉仪,对定位技术进行实验,对单点定位和多点定位分别进行验证。重点分析了影响该系统定位稳定性的因素,提出了解决方法。同时,还提出了一种定位筛选方法,来提高定位的稳定度和可靠性。实验结果表明,使用了该算法后,系统的定位可靠性和定位精度大为提高,对以后相关工作的展开有很大的参考意义。
1 双马赫-曾德尔型传感系统的原理及定位算法
1.1 干涉仪原理图
为了实现对破坏行为的定位,现构建了双马赫-曾德尔结构的干涉型分布式光纤传感系统,如图1所示。
在图1所示结构中,主要包括光源LD,1×2耦合器C1、C3、C4,2×2耦合器C2,探测器P1、P2,传感光纤F1、F2,以及传导光纤F3。LD为长相干光源,为马赫-曾德干涉仪提供光源。耦合器C2、C3、C4,传感光纤F1和F2,以及传导光纤F3,构成两个相反方向的马赫-曾德干涉仪,P1和P2用于对其光强的探测。
根据干涉理论,P1和P2接收到的干涉光强I1、I2分别为:

图1 双马赫-曾德尔型分布式光纤传感系统结构Fig.1 Structure of dual Mach-Zehnder fiber-optic distributed sensing system

其中,I0为设LD发出的光强,K为大于0且小于1的系数,L为传感光纤长度,z为振动作用距离,n为单模光纤折射率,Δφ为振动f(t)作用引起的光相位变化。c为真空光束,λ为激光波长,设

τ1、τ2表示正反两路干涉信号的时延,ΔφL为光程引起的相位,则式(1)和式(2)可表示为:

上两式去掉直流项:

将式(7)取相反数,可得:

式(8)和式(9)信号为彼此有一时延的互相关信号,它们之间存在时延差:

作用位置z是延迟时间Δτ的函数。

从式(11)可知,由于n、c都为定值,所以只需测得I1r和I2r两个信号之间的时延Δτ,就可以求得破坏作用的位置z,实现对破坏行为的定位。
1.2 基于互相关算法的定位理论
求两列信号的时延Δτ,比较经典和实用的是互相关算法[10-11]。实际情况下,马赫-曾德尔干涉仪输出叠加噪声后,应表示为:

式(12)中,I1(t)、I2(t)分别为外界振动引起的两路互相反向传播且有一定时延的信号,n1(t)、n2(t)为叠加的白噪声。将y(t)反相,对两路信号进行互相关计算,其互相关系数为:

由于白噪声信号与I1(t)和I2(t)之间不相关,积分后为零,所以上式可简化为:

对信号采样后的离散数据,式(14)变为相关序列的求取

在相关序列Rxy(m)中,找到Rxy最大值对应的m′点,然后根据采样周期T可以得到两个信号之间的时延差Δτ=m′·T。在求得Δτ的基础上,根据式(10)可求得破坏等行为的作用位置z。
从式(11)可知,振动信号发生位置z与I1和I2两个信号的时间延迟Δτ有关,所以只需要测得这两个信号之间的时延Δτ,就可以求得外部作用的位置z。

由式(16)可知,定位的精度dz与采样周期T及Rxy最大值对应的m′点的精度有关。虽然采样周期T不直接造成定位误差,但是采样周期T的大小却决定了定位精度的上限。当采集卡采样率为1MHz时,其采样周期为1μs,将c=3×108m/s,n=1.5,代入式(16),如果对相关系数最大值点位置产生误判,m′每偏移一个单位,对应的距离偏差就高达100m,而如果将采集卡采样率提高为10MHz,同样偏移一个点对应的距离值仅为10m。所以可以通过提高采集卡的采样率来减小由于最大值点的求取偏差对最终定位精度的影响。
2 定位实验
2.1 双马赫-曾德尔型传感系统实验平台搭建
为了增加实验在工程施工中的可信度,使用了常用的三芯铠装光缆作为实验传感光缆,将七卷光缆串联在一起。传感光缆结构图如图2所示。
为了保证测试的全面性,实验时从传感光纤的空间分布中依次选用了七个测试点,分别为B,C,D,E,F,G,H。七卷光缆的长度分别为200m、2590m、2050m、1690m、2370m、2930m、1620m。光缆总长度为13450m。
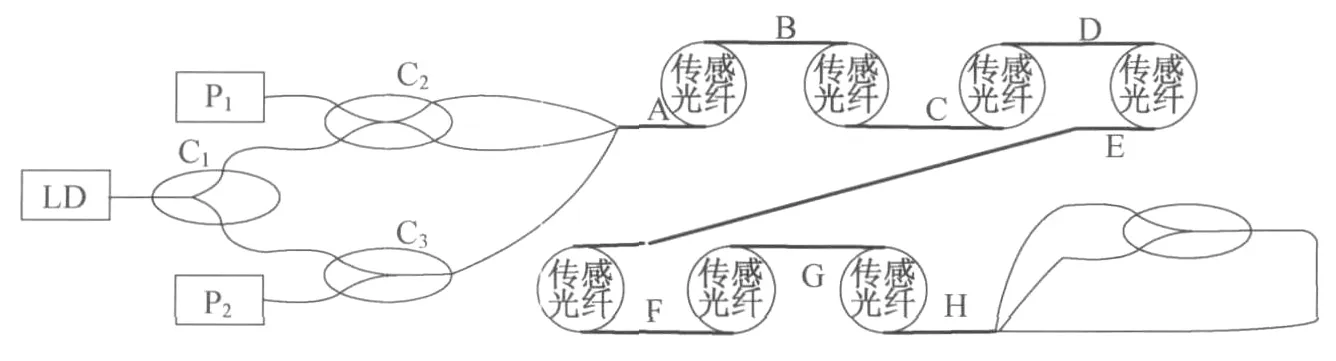
图2 实验组成及光缆结构Fig.2 Experimental composition and fiber structure
2.2 互相关定位程序设计
在进行互相关定位程序设计时,采用LabVIEW虚拟仪器进行编程,程序框图如图3所示:包括信号采集、滤波、触发、有用信号提取、互相关算法、入侵位置输出几大模块,实验中使用的数据采集卡最高采集速度为10MHz,双通道采集时每通道5MHz,两个采样点对应的距离约为20m。
定位程序中,设置触发器电平,当干涉信号幅度超过触发电平时,开始采样。采样率可根据需求进行调整。在上面程序中,每触发一次采集5万组数据。考虑到计算速率和数据有效性,程序中只提取出此组数据的前2万组,送入后级进行互相关运算。
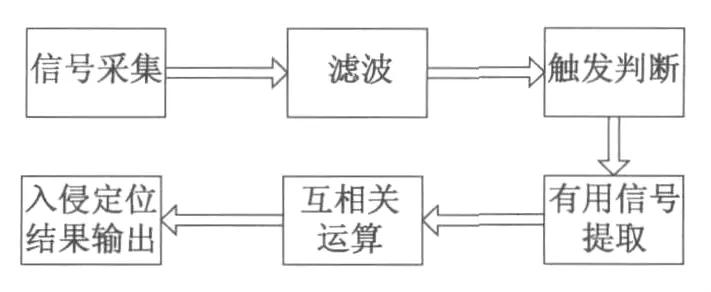
图3 互相关定位程序框图Fig.3 Block diagram of cross-correlation algorithm
2.3 单点定位实验
单点定位测试时,设置采集卡触发电平,每触发一次采集采样点50000个,对应的时间为0.01s。每一个测试点共测试30次,得到30个结果。对采样数据进行互相关运算,求得定位距离如图4所示,B-G组数据对应图2中B-G点的测试数据。
从数据可以看出,B-G组数据定位较为准确,波动较小。尤其是E、F、G三组数据,定位范围在200m内。只有H组数据多次出现定位错误。分析原因,主要是由于H点位于光纤末端,靠近2×1耦合器,对振动不敏感,故定位不准确。
2.4 两点定位测试
双马赫-曾德尔采用的定位原理是基于互相关算法求取延时。从理论上来讲,对于多点扰动,只有当不同扰动信号相互正交时,才能将各个扰动点定位出来,而普通振动信号都有或多或少的相关性,故定位点会出现在多个扰动点的中间。
为了验证多点定位能力,首先对系统的两点定位进行了验证。选取距离E点和F点,固定在振动平台上,对两点同时施加振动,测量此时的定位距离。其中E点理论距离为1.69km,F点理论距离为3.74km。结果如图5所示。
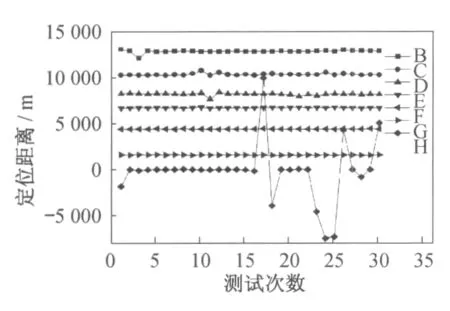
图4 单点定位结果Fig.4 Single point positioning
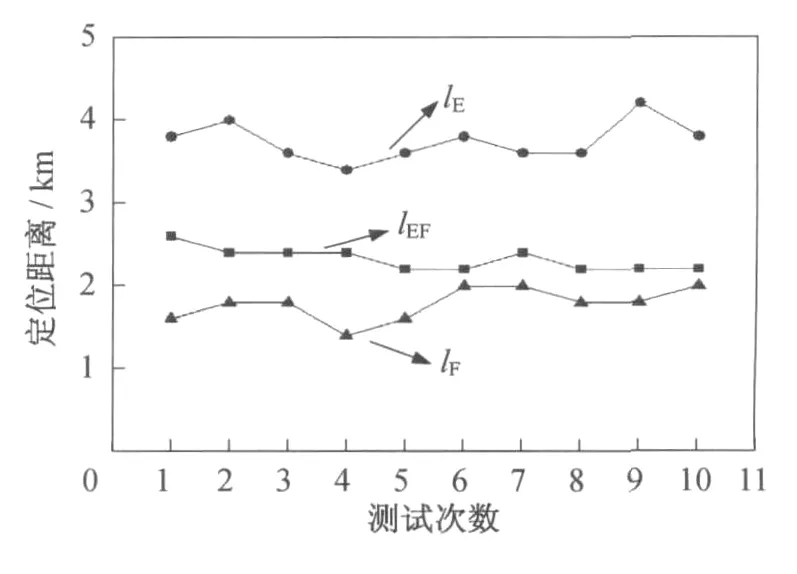
图5 EF双点定位结果Fig.5 Two-point positioning of EF
图5中,lE、lF曲线分别为E、F两点单独振动时的定位距离;lEF曲线为E、F两点同时振动时的定位距离。由于E、F两点的中心位置大概为2.7km,可发现,E、F两点同时振动时,定位距离在E、F两点的中间位置。可见用双马赫-曾德尔系统来实现多点定位是不现实的。它只适合进行单点定位。
3 定位稳定性分析
目前在工程上双马赫-曾德尔系统最大的缺陷在于它的定位稳定性较差,即使同一个地点发生振动,它的定位距离偏差往往会超过几公里,甚至更大。它的这种定位不稳定的特点极大地影响了该系统的使用,为此,现对影响系统稳定性的各方面因素进行了分析,例如耦合器相位噪声、传感光缆背景噪声、信号频率和信噪比、不同的定位算法及去噪措施等。经过多方面的实验验证,可发现当信号频率偏低或者幅度偏小的时候,定位结果往往会出现较大偏差(见图6)。信号频率偏低一般是由于振动频率较低,例如对光纤的轻轻摇动或拉动、滚动等。而幅度较小则是因为振动信号微弱,对光纤相位影响较小。
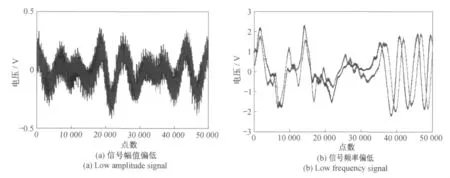
图6 定位偏差较大的采样信号Fig.6 Sampled signal with large location error
如图6(a)中的信号,幅度仅有0.3V,信号非常微弱,信噪比仅有2~3倍,定位偏差5.2km。而正常采样信号一般频率都10kHz以上,振幅在2V以上,信噪比20以上。图6(b)中的信号,频率远低于1kHz,仅有百Hz左右,定位偏差2.4km。信号频率涉及到信号空间分辨力,频率越低,信号空间分辨力越低,故定位精度越差。
振动信号的定位精度与多种因素有关,其中采集卡采样频率决定了定位精度的上限,例如实验中使用5MHz采集卡,单次定位精度上限为20m。定位精度的下限则与相关函数的时延估计精度有关,即跟信号的信噪比有关。另外,信号的频率决定了空间分辨力,频率越低,越难分辨,故低频信号定位效果不好。
实际测量中,要避免这两种情况对定位精度的影响其实非常简单,只需要在采集卡前面接一高通滤波器,将低频干扰信号滤除,就可以降低甚至去除低频信号对定位的影响;另外将采集卡的触发阈值设高(例如将触发阈值设为1~2V),就可以避免微弱信号对定位的影响。
4 数据处理算法
上面分析中,采用的是常用的平均法:即对同一入侵信号分段后进行多次定位,再对多次定位的结果进行平均,这样带来的误差还是比较大的。尤其考虑到在定位数据中,有一些明显的误定位甚至失败定位,这些数据点只占少数,但与实际入侵距离偏差特别大。若没有筛选就直接进行平均计算,会对平均后的定位结果带来较大误差。鉴于此,现考虑了一个算法,用来筛选掉偏离平均值较大的数据点,以增加定位精度。
每组数据求得平均值后,通过设定一个偏离阈值,将数据偏离平均值的距离大于偏离阈值的点筛选掉。通过控制筛选迭代次数和偏离阈值可以很好地提高定位精度。同时为了防止定位出错,当多次筛选时剔除掉的数据超过总数据的一半时,提示定位失败。
实验中,将图4定位结果用该算法进行了两次迭代筛选:第一次筛选时偏离阈值为500m;第二次筛选时偏离阈值为100m。实验结果如图7所示。
从图4和图7的对比中可以看出:经筛选处理之后的图形平坦了许多,所有的定位偏差较大的点都被筛选掉了。根据上述分析,经过算法筛选后的数据,每一组定位范围都能达到100m以内,再对多组数据求平均,其定位精度更高。

图7 筛选处理后延迟距离曲线Fig.7 Delay distance curve after filter
5 结 论
通过对基于互相关算法的定位原理分析和系统的入侵定位实验表明,基于双马赫-曾德尔干涉技术的分布式光纤传感器可以实现对单点扰动进行定位,但多点定位时,各入侵信号间可能存在一定相关性,互相关算法无法对其进行区分,会产生误定位,故本技术不适合多点定位。系统定位的稳定性主要与振动信号频率和信噪比有关,振动信号频率过低、信噪比过低都会导致一定的定位偏差甚至误定位;需要通过对干涉信号进行滤波和提高触发阈值来解决。最后还提出了一种定位筛选算法,通过多次迭代筛选,将定位偏离平均值较大的点筛选掉,从而提高了系统定位的稳定性和可靠性,达到了良好的实验效果。
[1]吕海宝,黄 锐,楚兴春.分布式光纤传感技术[J].光学仪器,1997,19(3):11-17.
[2]FANG X.A variable-loop Sagnac interferometer for distributed impact sensing[J].Lightwave Technol,1996,14(10):2250-2254.
[3]许海燕,徐 锲,肖 倩,等.基于时延估计的分布式光纤传感定位[J].光学学报,2010,30(6):1603-1607.
[4]DAKIN J P D,PEARCE A J,STRONG A P,et al.A novel distributed optical fiber sensing system enabling location of disturbances in a Sagnac loop interferometer[J].SPIE,1987,838:325-328.
[5]吴 俊,陈伟民,谭 靖,等.Sagnac/Mach-Zehnder分布式光纤传感系统探测及定位理论分析[J].光子学报,2009,38(2):347-351.
[6]SPAMMER S J,SWART P L,CHTCHERBAKOV A A.Merged Sagnac-Michelson interferometer for distribuated disturbance detection[J].Lightwave Technol,1996,14(10):2250-2254.
[7]陈伟民,吴 俊,谭 靖,等.双马赫-曾德尔分布式光纤传感系统定位技术[J].光学学报,2007,27(12):2128-2132.
[8]陈朋超,蔡永军,李 俊,等.基于改进型马赫-曾德干涉仪原理的管道安全预警系统研究[J].传感技术学报,2009,22(11):1661-1664.
[9]蒋立辉,张 峰,刘向明.Mach-Zehnder干涉型长周界预警系统入侵目标定位[J].传感器与微系统,2011,30(4):48-50.
[10]吴 军.长途油气管道破坏预警的干涉型分布式光纤传感系统定位技术研究[D].重庆:重庆大学,2007:47-61.
[11]肖洪梅.微弱激光脉冲信号的相关检测[D].成都:电子科技大学,2004:5-8.
猜你喜欢
军事文摘(2023年4期)2023-04-05
汽车观察(2022年12期)2023-01-17
小哥白尼(军事科学)(2019年10期)2020-01-18
小哥白尼(军事科学)(2019年6期)2019-10-14
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
测控技术(2018年4期)2018-11-25
火炸药学报(2014年3期)2014-03-20
测绘科学与工程(2013年2期)2013-03-11
视野(2009年4期)2009-06-10