多源数据融合法更新公路通道车流OD矩阵
2012-03-09 08:14
武汉理工大学学报(交通科学与工程版) 2012年6期
(武汉理工大学交通学院 武汉 430063)
区域交通小区机动车出行OD矩阵是进行交通规划、交通运行管理等重要基础数据.依据路段流量及先验出行信息进行区域交通小区OD估计的方法得到了广泛地应用.这些方法可以归为统计估计方法和数学规划方法两类,是基于极大熵法或是基于最小信息理论或是网络平衡技术进行研究[1-4].此外,随着信息技术的不断发展,手机定位、无线网络等技术为OD的获取开辟了新的途径[5-7].同时,考虑核查线流量以及核查线的位置,也为OD矩阵估计提供了新的思路[8-9].本文以服务高速公路运输通道改扩建交通运行管理为目的,设法综合运用现有的多种车流数据,以更新经过公路通道的车流OD为目的,最终获取经校核且更为可靠的区域交通小区OD矩阵.
1 现有数据源
改扩建公路由于处于交通要道,出入口都安设有车流量检测器,可以获取各出入口分车型的流量.改扩建公路本身及其周边干线重要路段上也安设有路段流量检测器,可以获取部分重要路段的分车型流量.另外,改扩建工程预备工程阶段一般都进行了交通小区车流OD调查,虽存在抽样率低、精度低的缺陷,但也能大致反映交通流量、流向的趋势.
与已有的OD估计方法不同,本文获取最终OD初始基础数据包括:工程预备阶段调查车流OD、互通出入口流量、部分路段流量.预备工程阶段调查区域车流OD,在之前的众多相关文献中称之为先验OD,主要为判断改扩建工程是否可行,反映改扩建前期区域内的出行状况,在一定程度上体现了交通出行的发展趋势,因精度低,难以用于改扩建时期的运行管理研究.另外一个重要且十分有用的流量数据是公路通道沿线互通的出入口流量,它在上述文献中几乎没有涉及,是本文研究获取区域交通小区车流OD的重要数据源之一,但与工程预备阶段OD存在着时间上的不一致性.
2 多源数据融合法
2.1 技术路线
多源数据融合法技术路线,见图1.
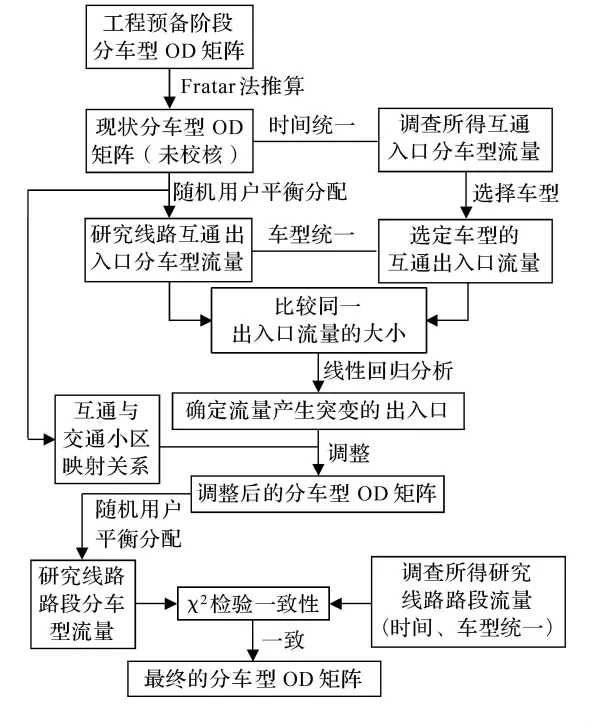
图1 多源数据融合法技术路线
2.2 数据源统一
工程预备阶段获得的OD矩阵(以下简称“初始OD矩阵”)存在诸多不足,需要进行调整校核,但首先应初步保证初始OD与当前已获得的通道路段流量和出入口流量在时间上保持统一.本文运用Fartar增长率法将初始OD矩阵逐步推算到现状阶段,得到从初始年份直到现状的OD矩阵(未校核),再利用TransCAD分别进行随机用户平衡分配,得到各年区域路网及通道的流量.
分配得到的通道路段流量及各出入口流量相对于现状情况而言仍然存在较多不足,需要进一步的调整.调查所得的现状公路通道路段流量及沿线互通出入口流量,可以更为直接地反映公路通道的通行状况.因此,考虑将其作为标准与由初始OD分配得到的流量进行比对,再结合互通与交通小区的映射关系,对现状OD矩阵(未校核)进行调整、校核(在利用调查获得的流量前,将调查得到的路段流量和互通出入口流量按标准车型转换为当量小汽车).
2.3 数据融合
设初始OD矩阵为M0(分车型),M1,M2,…,Mn分别为由M0逐步推算而来的各年的分车型的区域OD,且Mn为未校核的现状OD.那么Mn分配得到的通道各互通出口流量为Ak,入口流量为Bk;经过车型统一后的调查得到的出口流量为¯Ak,入口流量为¯Bk.其中:k为研究线路上的第k个互通.针对同一互通,通过线性回归分析比较交通分配得到的出入口流量与调查值的相似性,根据这种相似性来显示初始OD的准确性,进而判断其是否需要进行调整.根据本文的实际需要,此处采用不带常数的一元线性回归模型,即yk=bxk.其中:yk为分配得到的互通k出、入口流量;xk为依赖时间的互通k出入口流量调查值;b为拟合参数.此处b与1的差别显著与否,体现了两类互通出入口流量差别的大小,也就表明了初始OD的准确与否,进而判断是否需要调整.若拟合的相关系数R2较大,且b接近于1,则无需调整;否则,与该互通出入口相联的交通小区OD需要调整.特别地,当b<1时,说明分配得到的互通出入口流量与调查流量相差较大,即意味着初始OD矩阵中与该互通出入口相联的交通小区OD值需要适当地扩大;而当b>1时,则需要向相反的方向做类似的处理.
假定经比较后,确定需要进行流量调整的互通为k(k=1,2,…,n),对应的出口或入口流量的差值为xk-yk,且该差值可正可负.将通道影响区域划分为m个交通小区,任意两个小区间的出行流量为Tij.其中:i为起点小区;j为讫点小区;(i,j)∈Mn,i,j=1,2,…,m.设αik为当交通小区i的出行是通过互通k实现时,其出行交通量在互通k的出口流量Ak或入口流量Bk中所占的比例,那么可以得到,…,n.其中:Oi分别为调整前后以小区i为起点的流量之和;Di,D′i分别为调整前后以小区i为讫点的流量之和.然后,以现状OD矩阵(未校核)为基础,结合新的交通小区发生、吸引量(即,),利用Fratar增长率法获得发生、吸引平衡的通道影响区交通小区出行OD矩阵.

2.4 精度检验
本文以调查的现状路段流量作为“查核线”来检查调整后的OD矩阵精度.具体方法如下:将调整后的分车型的区域OD矩阵在分析的路网上进行随机用户平衡分配,得到各路段分车型流量;挑选具有调查流量的路段,分车型对分配的流量和调查流量进行χ2检验,由此判断调整后的OD矩阵的准确性.设调查得到的路段流量为…,,…,对应的方差为;相应地,调整后的OD矩阵分配得到的通道路段流量为q1,q2,…,ql,…,qn,对应的方差为S2,l=1,2,…,n.其中:,ql表示第l个路段的流量.那么,在假设通道路段流量呈正态分布,给定显著水平为α的情况时,认为两类路段流量差别较大,即说明调整后的OD矩阵不够准确.
3 实例分析
以京港澳高速公路(河北段)为例,选择小客车车流作为研究对象,对多源数据融合方法进行测试和检验.京港澳高速公路全线共设互通38处,其中一般服务型互通33处,枢纽型互通5处.根据研究的特点和需要,将影响区内各个市、县级行政区划划分为52个交通小区;各交通小区通过以上互通与京港澳高速公路产生直接或间接的联系,见图2.图3则显示了初始年份(2007)影响区响区内利用京港澳高速公路出行,各小区间的小客车车流OD分布状况.(由于涉及到的交通小区众多,故根据影响区内路网及小区划分的特点,进行了进一步的小区及流量合并以简化显示.)

图2 影响区交通小区划分

图3 影响区2007年OD分布(小客车)(单位:pcu/d)
以影响区内各县、市的地理区位和经济发展水平等为依据,选取具有代表性的6个互通作为分析对象.表1包含了所选6个互通2007~2010年的调查得到的互通出入口小汽车流量.
由初始OD矩阵M0推算而来的各年的OD矩阵分别为 M1(2008),M2(2009),M3(2010,即现状年份).然后利用TransCAD对以上OD矩阵在河北省路网上进行随机用户平衡分配,得到2007年至2010年京港澳沿线各互通出入口小汽车流量.表2呈现了由分配得到的互通出入口小汽车流量.
综合表1和表2,以表1中的流量值为“标准”,利用SPSS分析软件,对同一互通2007~2010年的出入口流量分配值yk与调查值xk(亦即Ak或/和Bk)进行线性回归,其结果见表3.
根据以上分析结果显示,由第2部分所确定的判断准则,在涿州北互通(k=1)、徐水互通(k=2)、石家庄互通(k=5)、邢台北(k=6)处出入口流量回归参数b与1相差较大和相关系数R2也相对较小,因而,这4个互通出入口对应的交通小区需要进行流量调整.利用TransCAD确定的互通与交通小区间的映射关系见表4.
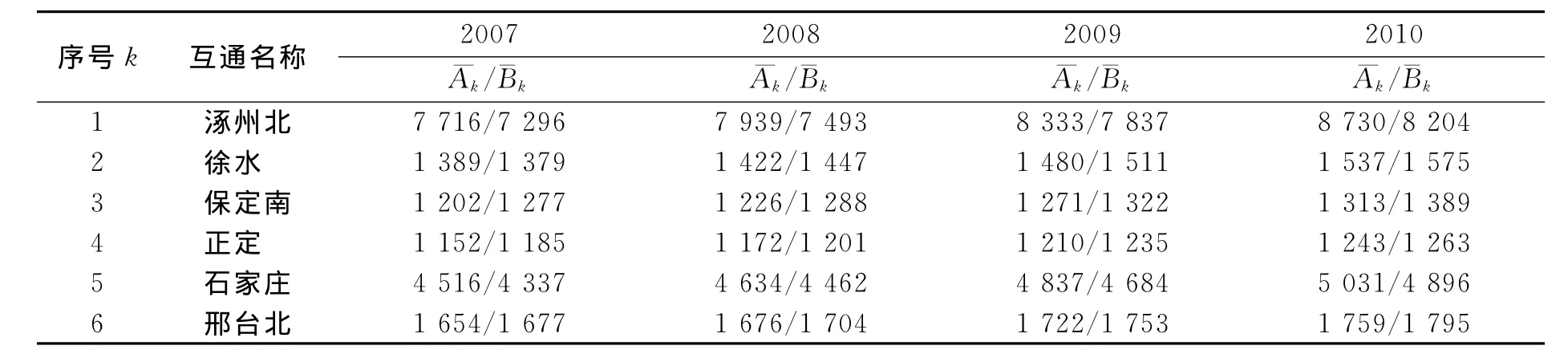
表1 互通出入口小汽车流量调查值 pcu/d

表2 分配得到各年互通出入口小汽车流量 pcu/d
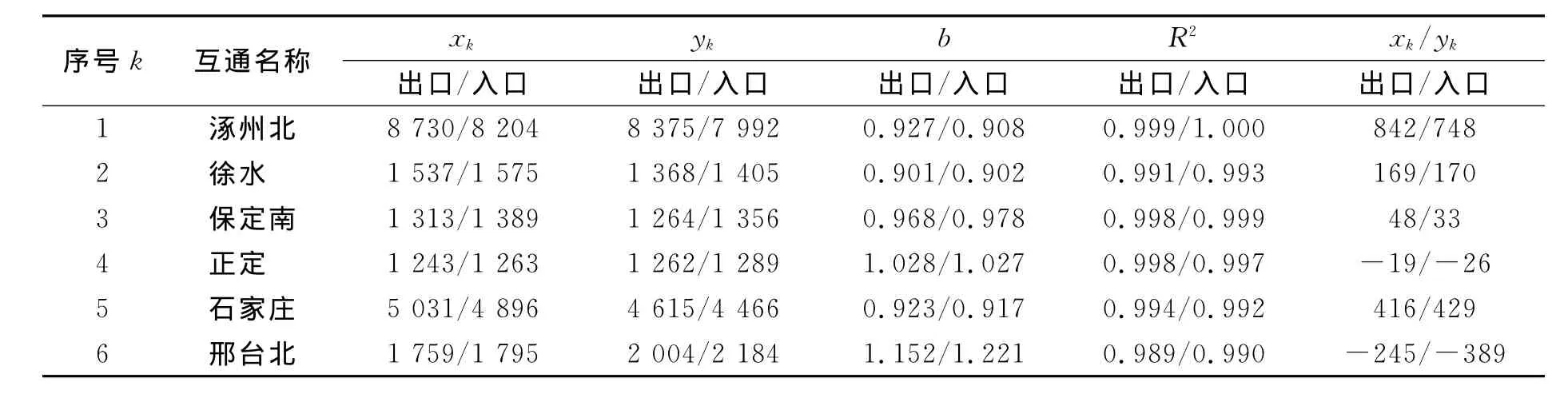
表3 互通出入口流量回归分析结果 pcu/d

表4 互通与交通小区的映射关系
由以上映射关系,根据第2部分中介绍的方法调整表5中涉及的所有OD对的交通量.表5以交通小区3,5,24和37为例呈现了OD调整情况.然后以交通小区量为基础,利用 Fratar增长率法获得调整后的小汽车车流OD矩阵.

表5 现状小汽车车流OD调整 pcu/d
将以上调整后的OD分布在原路网上进行随机用户平衡分配,得到京港澳高速公路路段上的小汽车流量.选择具有调查流量的路段,对分配的流量和调查的流量(见表6)进行检χ2验,过程如下.
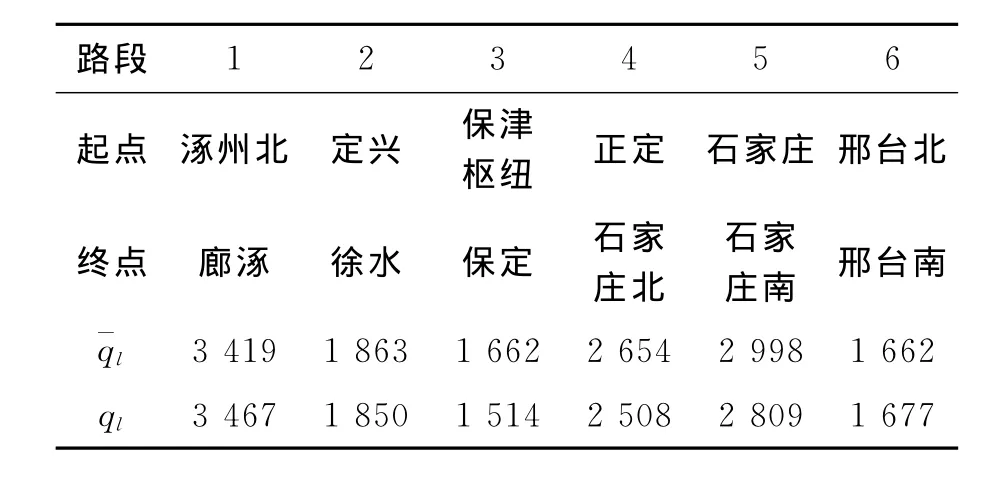
表6 路段小汽车流量调查值和分配值pcu/d
根据表6中的流量值计算得:σ20=506 053,S2=487 985;又n=6,那么,在显著水平α=所以,经检验调整后的小汽车车流 OD矩阵符合精度要求.
以上分析结果显示,经调整后的OD矩阵分配得到的路段流量与调查得到的路段流量达到一致,即说明以调查得到的出入口流量为“标准”进行的一系列比较、调整过程是有效可行的,也即实现了对初始OD由点(互通)到线(通道)的核查、检验,并获得了更为精确的OD矩阵.
4 结束语
多源数据融合获取车流OD法利用了现有可得工具、方法和可能的数据源,对工程预备阶段初始OD结合公路走廊出入口多年流量数据进行了调整和校核,校正了车流OD流量流向变化新趋势;根据部分路段流量数据对调整后的OD精度进行了第二重校核,为获取可靠车流OD提供了双重保证.
[1]SHERALI H D,NARAYANAN A,SIVANANDAN R.Estimation of origin-destination trip-tables based on a partial set of traffic link volumes[J].Transportation Research Part B:Methodological,2003,37(9):815-836.
[2]SHERALI H D,SIVANANDAN R,HOBEIKA A G.A linear programming approach for synthesizing origin destination(O-D)trip-tables from link traffic volumes[J].Transportation Research Part B:Methodological,1994,28(3):213-233.
[3]SHERALI H D,PARK T.Estimation of dynamic origin-destination trip tables for a general network[J].Transportation Research Part B:Methodological,2001,35(3):217-235.
[4]HAZELTON M L.Statistical inference for time varying origin-destination matrices[J].Transportation Research Part B:Methodological,2008,42(6):542-552.
[5]杨 飞.基于手机定位的交通OD数据获取技术[J].系统工程,2007,25(1):42-48.
[6]BARCELóJ,MONTERO L,MARQUéS L,et al.A Kalman-Filter approach for dynamic OD estimation in corridors based on bluetooth and Wi-Fi data collection[C]//Lisbon:12th World Conference on Transportation Research WCTR,2010.
[7]HERRERA J C,BAYEN A M.Traffic flow reconstruction using mobile sensors and loop detector data[C]//Washington D C:Transportation Research Board 87th Annual Meeting,2008.
[8]WU J,CHANG G.Estimation of time-varying origin-destination distributions with dynamic screenlines flows[J].Transportation Research Part B:Methodological,1996,30(4):277-290.
[9]YANG H,YANG C,GAN L.Models and algorithms for the screen line-based traffic-counting location problems[J].Computers & Operations Research,2006,33(3):836-858.
猜你喜欢
工会博览(2022年33期)2023-01-12
工会博览(2022年5期)2022-06-30
现代苏州(2019年18期)2019-10-15
中国外汇(2019年12期)2019-10-10
现代苏州(2019年16期)2019-09-27
建材发展导向(2019年11期)2019-08-24
中国交通信息化(2019年12期)2019-08-13
扬子江(2019年3期)2019-05-24
浙江大学学报(工学版)(2016年9期)2016-06-05
公民与法治(2016年16期)2016-05-17