基于ADAMS的车辆ESP控制模型及方法研究*
2012-03-09 08:14李胜琴
武汉理工大学学报(交通科学与工程版) 2012年6期
李胜琴 何 乐
(东北林业大学交通学院1) 哈尔滨 150040) (清华大学汽车安全与节能国家重点实验室2) 北京 100084)
0 引 言
汽车电子稳定性程序(electronic stability program,ESP)通过控制车轮的制动力或发动机的输出力矩,来控制汽车的横摆角速度并将车辆的侧偏角限制在一定范围内,从而在汽车躲避前方突然出现障碍物、急转弯车道上高速行驶以及低附路面等处于附着极限时,协助驾驶员控制汽车的操纵稳定性[1-2],防止车辆出现过度转向、不足转向或侧翻等危险工况.
国内对ESP系统的研究起步较晚,大多数研究重心仍停留在控制策略的理论研究上,由于在汽车产品开发初期,无法实施基于整车动力学模型和底盘电控系统虚拟样机的装备ESP等底盘电控系统的汽车性能评价,整车厂商很难在产品设计阶段对汽车电子供应商提出完善的产品设计技术要求,故无法开展对整车装备电控系统后的性能预测分析控制;同时由于无法及时发现并解决控制系统设计中存在的问题,大大增加了整车厂商与汽车电子供应商的底盘电控系统匹配设计周期和研发成本.
本文针对某型车建立ADAMS与MATLAB联合仿真模型,建立基于横摆角速度的ESP控制方法,并对控制结果进行仿真研究,探讨ESP系统评价方法及评价体系的合理性及有效性.
1 ESP系统组成及工作原理
比较典型的汽车ESP控制系统包括传统制动系统、传感器(轮速传感器、转向盘转角传感器、侧向加速传感器、横摆角速度传感器、制动主缸压力传感器)、液压调节器、汽车稳定性制电子控制单元(ECU)和辅助系统(发动机管理系统)[3-4].
目前市场上的ESP系统基本上都是采用差速制动作为控制方式.如图1所示,ESP系统通过传感器检测车辆的实际运行状态,与驾驶员操作意图进行比较,来判断车辆是否处于稳定的行驶状态.进而决定是否进行制动调节.首先系统判断汽车处于过多转向还是过度不足转向,当汽车处于过多转向时,通过对前外车轮施加制动产生与汽车转向运动方向相反的横摆力矩,从而抑制汽车的过多转向运动;当汽车处于不足转向时,则通过对后内侧车轮施加制动产生与汽车转向运动方向相同的横摆力矩,抑制汽车的不足转向运动.
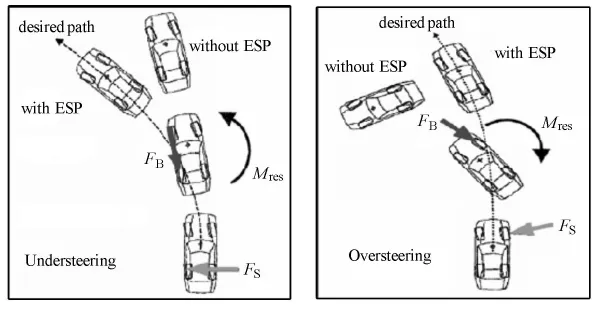
图1 ESP控制系统原理图
本文将横摆角速度作为监测状态,进而判断车辆的运行状态,利用模糊控制理论进行ESP系统控制,考察该控制系统的有效性与合理性.
2 车辆模型
2.1 虚拟样机模型
为了进行ESP控制系统的仿真研究,首先需要对原型车进行适当简化,建立ADAMS/Car虚拟样机模型.ADAMS/Car整车虚拟样机模型,通常包括前/后悬架系统、转向系统、发动机、车身、轮胎模型等子模型及路面等外部约束.
原型车前悬架为高置双A臂、后悬架为E型多连杆式.根据实际测量结果,在ADAMS/car中建立如图2的包含转向系、横向稳定杆的前/后悬架模型.
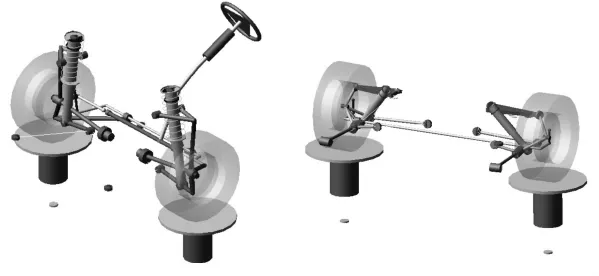
图2 虚拟样机前、后悬架模型
车辆的转向系统、发动机、车身及横向稳定器等子系统,可以在ADAMS/Car自带模板的基础上按照原型车参数进行修改.车辆的各子系统完成之后,装配成如图3的整车虚拟样机模型.
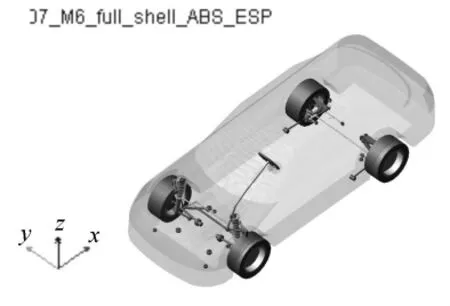
图3 整车虚拟样机模型
车辆的轮胎模型选用Pac2002魔术公式模型,利用轮胎试验数据拟合出适用于ADAMS/Car软件所需的参数,建立模型.利用路面建模器建立二维平坦路面.利用路面参数和车辆模型参数共同模拟实际路面附着系数的变化.
为了验证所建立的模型,进行车辆双移线试验模拟,并将模拟结果与实车试验结果进行对比,见图4.可以看出试验曲线与模拟曲线吻合程度较好,认为所建立整车样机模型能够反映车辆的基本特性,可以用于进行车辆操纵稳定性及ESP控制系统的模拟仿真分析.

图4 双移线试验与模拟分析对比
2.2 联合控制模型
为了进行ESP控制系统联合仿真,需要将在ADAMS/Car中建立的虚拟样机模型转化为S-function,到 Matlab/Simulink软件环境下中进行 闭 环 控 制 仿 真[5-6].图 5 为 ADAMS/Car 和Matlab/Simulink的ESP联合仿真模型,即首先从整车虚拟样机模型得出车辆横摆角速度等状态参数,然后与参考模型计算出的期望横摆角速度进行比较,判断车辆的稳定状态,从而对相关车轮制动.
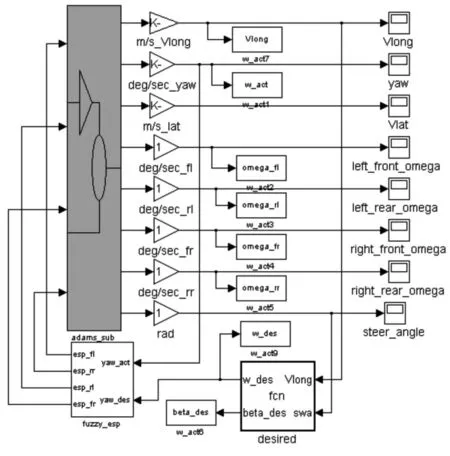
图5 ADAMS/car和 matlab/Simulink的ESP联合仿真模型
图中adams_sub模块是由ADAMS/Car导出的虚拟样机S-function模块,该模块包含了整车的全部信息.其中,在建整车子部件时已定义了输入和输出状态变量,如在建制动器模型时定义各个车轮的制动压力为输入状态变量,在建车身时定义其横向速度、纵向速度、横摆角速度为输出状态变量,在建车轮时定义轮速为输出状态变量,在建转向系统时定义转向盘转角为输出状态变量.desired模块为线性二自由理想模型,用于完成汽车期望状态参数的计算;ESP模块是ESP联合仿真系统的核心,它主要完成汽车稳定性判断和主动横摆控制等,本文采用基于横摆角速度的模糊控制.控制原理见图6.

图6 ESP控制原理图
3 仿真控制效果
美国国家高速公路交通安全局NHTSA于2007年4月发布了FMVSS126,该法规对ESP的功能、试验方法和评价指标作了规定.FMVSS 126标准规定的正弦延迟试验转向盘转角如图7所示,为0.7Hz频率的正弦输入,以13.5°/s的速度增加转向盘转角,初始转角为δ=1.5A0.3g,入口初始速度为80km/h.每次振幅增加0.5A0.3g.转向角最大值δ大于270°或者等于6.5倍的A0.3g时,停止试验.完成正弦转角试验后,以车辆侧向位移和横摆角速度作为稳定性控制的评价.

图7 正弦延迟试验
当转向盘转角达到或超过5A0.3g时,对于整车质量小于3 500kg的汽车,要求正弦转角试验开始后1.07s时的汽车质心侧向位移大于1.83m;对于整车质量大于3 500kg的汽车,该位移应大于1.52m.
对横摆角速度的评价参看图8,图中T0为正弦转角结束时刻.对横摆角速度要求如下
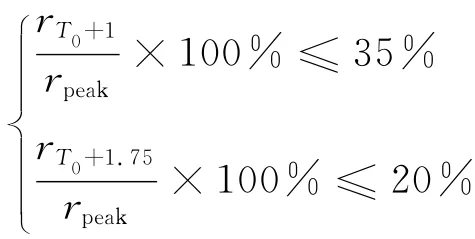
式中:rpeak为第二个正弦点的峰值横摆角速度;rT0+1为 T0+1 时 刻 的 横 摆 角 速 度;rT0+1.75为T0+1.75时刻的横摆角速度.
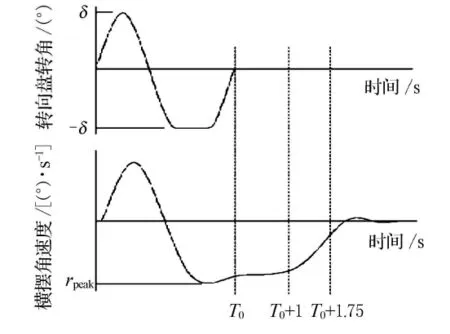
图8 正弦转角试验评价
按照FMVSS 126标准规定的正弦延迟试验方法,进行了高附路面下的模拟正弦延迟试验仿真分析[7].图9和图10分别为该车在ESP关闭和开启状态下的正弦延迟试验仿真分析结果.由图9可见,转向盘转角幅值为80°和120°时,车辆横摆角速度幅值随着转向盘转角的变化而变化,当转向盘转角回到中间位置后,车辆的横摆角速度经过了1s左右的小幅振荡后也回到0值,说明车辆能够回到稳定状态,车辆处于能够操纵状态.而当转向盘转角幅值达到169°时,横摆角速度经过振荡后没有回到0值,转向盘回到中间位置后车辆的横摆角速度仍然为35°/s,在3s时刻,车辆的横摆角速度仍然保持35°/s.图10为开启了ESP系统后的正弦延迟试验仿真结果.图中可以看出,当转向盘转角幅值达到180°时,车辆的横摆角速度在转向盘回到中间位置后t=3s时刻经过振荡归零,车辆仍然能够保持直线行驶,处于可操控状态.当转向盘转角幅值达到279°时,车辆横摆角速度振荡幅值增加,但是在t=4s时刻仍然能够归零,车辆能够继续保持直线行驶状态,按照FMVSS 126标准的稳定性评价,车辆仍然处于稳定行驶状态.说明当车辆处于过度转向的极限工况下,ESP系统能够抑制车辆的过度转向,进而使车辆在大的转向盘转角输入下仍然能够维持稳态行驶,提高了车辆的操纵稳定性.
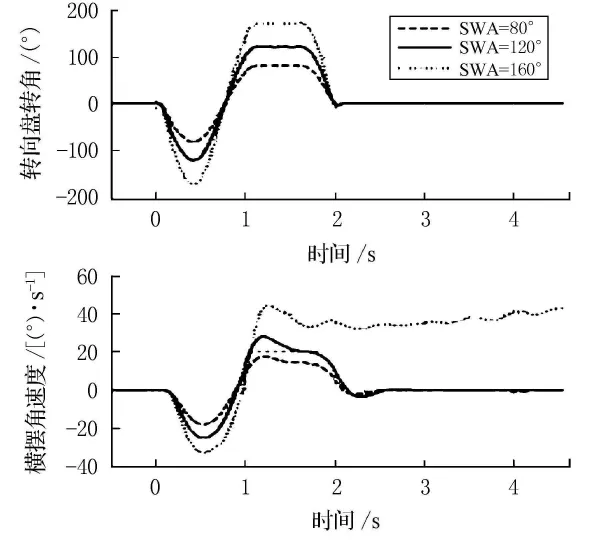
图9 ESP关闭时横摆角速度变化
4 结 论
1)利用ADAMS/Car软件分别建立原型车各子系统模型,进而建立整车虚拟样机模型,用于进行车辆ESP控制系统模拟仿真研究,试验验证模型精度高.
2)利用 Matlab/Simulink建立基于横摆角速度的ESP模糊控制模型,能够通过对车轮实施制动,进而有效地控制车辆稳定行驶,改善汽车的操纵稳定性.
3)按照FMVSS 126标准规定的正弦延迟试验方法,进行高附路面下的模拟正弦延迟试验仿真分析,结果表明当车辆处于过度转向的极限工况下,ESP系统能够抑制车辆的过度转向,进而使车辆转向盘转角达到279°时,仍然能够维持稳态行驶.
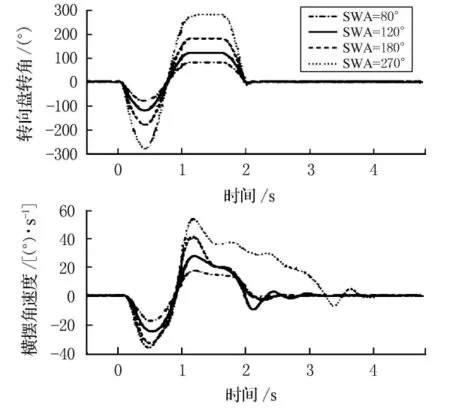
图10 ESP开启后横摆角速度变化
[1]李向瑜,高振海,郭 健,等.汽车装备电子稳定性程序后的性能评价方法[J].拖拉机与农用运输车,2008,35(4):1-4.
[2]ANTON T,van Zanten.Bosch ESP systems:5years of experience[J].SAE,2000(1):1633-1638.
[3]余志生.汽车理论[M].北京:机械工业出版社,2000.
[4]U.S.Department of Transportation,National Highway Traffic Safety Administration.Laboratory test procedure for FMVSS 126,Electronic Stability Control Systems,TP-126-01[Z].U.S.Department of Transportation,April 10,2008.
[5]范小彬,夏群生.基于虚拟样机的汽车稳定性主动横摆模糊控制[J].拖拉机与农用运输车,2010,37(1):47-49.
[6]王德平,郭孔辉,宗长富.车辆动力学稳定性控制的理论研究[J].汽车工程,2000,22(1):729-732.
[7]刘春辉,王增才.车辆电子稳定性程序的最优控制[J].武汉理工大学学报:交通科学与工程版,2010,34(1):64-67.
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08
新高考·高三数学(2022年3期)2022-04-28
装备制造技术(2020年4期)2020-12-25
房地产导刊(2020年6期)2020-07-25
中学生数理化·高一版(2018年6期)2018-07-09
理科考试研究·高中(2017年7期)2017-11-04
中国棉花(2017年10期)2017-11-04
中学生数理化·高一版(2017年3期)2017-07-08
中学生数理化·高二版(2016年9期)2016-05-14
火控雷达技术(2016年1期)2016-02-06