锚泊辅助动力定位系统单缆失效影响研究
2012-01-08 07:11李勇跃
海洋工程 2012年3期
张 峰,王 磊,李勇跃
(上海交通大学海洋工程国家重点实验室,上海 200230)
锚泊辅助动力定位系统单缆失效影响研究
张 峰,王 磊,李勇跃
(上海交通大学海洋工程国家重点实验室,上海 200230)
针对半潜式钻井平台锚泊辅助动力定位系统在海上作业时可能会出现的单缆失效情况。以一艘半潜式平台为例,设计锚泊辅助动力定位系统。通过全动态时域模拟,研究不同的单缆失效模式对半潜式平台锚泊辅助动力定位系统功率消耗、定位精度、缆绳张力等的影响。根据分析结果,在极端海况下,松弛锚泊辅助动力定位系统的背风缆有助于降低定位系统的功率消耗,提高定位精度和系统的安全性,从而为锚泊辅助动力定位系统的工程应用提供一些参考。
锚泊辅助动力定位;单缆失效;时域模拟;半潜式平台
当前,随着海洋平台作业水深不断增加,对定位系统的要求也日益提高。半潜式钻井平台常用的定位系统主要有三种,即锚泊定位系统、动力定位系统和锚泊辅助动力定位系统。锚泊辅助动力定位系统相比锚泊定位系统有更好的定位精度,相比动力定位系统有更小的功率消耗,是一种非常适合半潜式钻井平台深水作业的定位方式[1,2]。
根据DNV规范,海洋平台长期在海上作业,由于极端海况,操作失误或疲劳破坏等原因,锚泊辅助动力定位系统可能会出现单根缆绳断裂的情况,从而造成平台失效,这称为单缆失效[3]。单缆失效会造成平台定位精度,功率消耗,缆绳张力等的变化,严重的甚至影响平台的安全作业。所以对平台单缆失效的影响进行分析是十分必要的。
几十年来,国内外学者和研究机构对锚泊辅助动力定位系统进行了大量研究,得出了许多有意义的结论。Johan Wichers和Van Dijk[4]对动力辅助锚泊定位在中深水FPSO上的应用进行了分析,提出动力辅助锚泊定位系统的设计思路。Chris Jenman[5]对比分析了动力辅助锚泊系统需要考虑的主要问题和各种方法的优缺点。Sue Wang[6]验证了动力定位系统的存在能够有效减轻缆绳张力,提高平台定位精度和安全裕度。孙攀[7]验证了在推力器失效模式下,锚泊辅助动力定位系统相比动力定位系统有着更好的定位精度和更低的功率消耗。此外,Asgeir J.Sφrensen[8]等提出了FPSO的锚泊辅助动力定位系统的设计方法和设计要求。
针对一艘半潜式钻井平台,首先进行锚泊辅助动力定位系统的设计,然后考察在一定的环境载荷作用下,对定位系统不同的单缆失效模式进行时域模拟,最后通过对比平台定位精度和功率消耗,评价不同单缆失效模式对平台的影响程度,并提出一些合理化建议,为工程实践提供参考。
1 理论概述
本文将对半潜式平台进行时域模拟,故首先给出平台的时域运动方程,然后对锚泊辅助动力定位系统缆绳张力和推力器推力,功率的计算进行说明。
1.1 平台时域运动方程
半潜式平台在外力作用下的低频运动方程为[9]:

1.2 锚泊辅助动力定位系统
半潜式平台在环境载荷的作用下会发生水平偏移,故需要回复力将其定位在一定范围。平台定位所需的回复力由锚泊系统的缆绳张力和动力定位系统的推力提供。
对于锚泊系统,半潜式平台设计的是悬链线锚泊系统,采用三段复合式锚缆,可用复合缆悬链线方程进行求解[10,11]。
对于动力定位系统,推力、转矩及功率的计算公式为[12]:
其中:n为螺旋桨转速,Q为螺旋桨的转矩,D为螺旋桨的直径,KT为推力系数,KQ为转矩系数,KT,KQ可根据轴向进速在螺旋桨敞水性征曲线上查取。
2 计算实例
2.1 半潜式平台
以一艘半潜式钻井平台为例。主要组成部件包括:下附体2个、柱形连接构件2个、立柱4根、主甲板、箱形甲板、居住舱楼、直升机平台等。平台主要尺度如表1所示。
2.2 锚泊辅助动力定位系统
该平台采用锚泊辅助动力定位系统。动力定位系统采用8个全回转导管推力器,最大功率为4 600 kW。螺旋桨直径为3.6 m,具体型号采用Ka 4-70桨+No.19A导管,叶片形式为Kaplan型,桨叶数为4,盘面比为0.70,导管类型为19A,螺旋桨螺距比取为1.0,导管长度与螺旋桨直径比取为0.5[13]。
锚泊系统采用8点分散式悬链线锚泊系统,由4组、每组2根、共8根相同的锚缆组成。锚缆在平台上的导缆孔位置分别对称布置于4只立柱外侧。每根锚缆总长4 200 m,系泊半径3 677 m,采用三段式的组合锚缆形式,预张力为800 kN,破断强度及材料特性等参数参见表2[14]。锚泊系统和动力定位系统的总布置如图1所示。
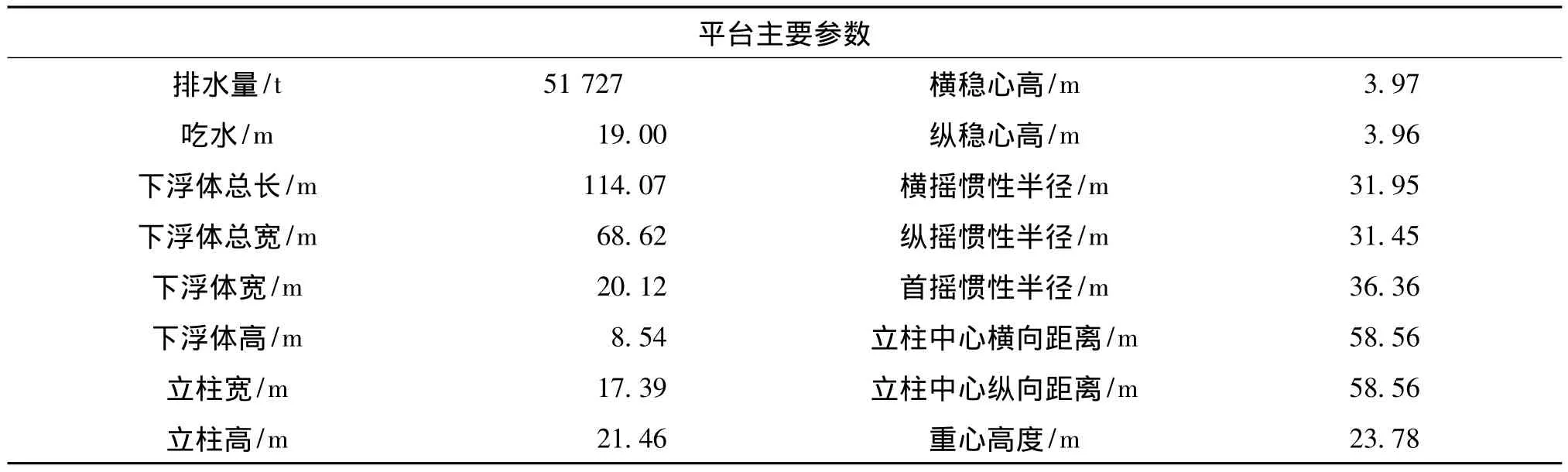
表1 半潜式平台主要参数Tab.1 Main parameters of the semi-submersible platform

表2 组合锚缆主要物理属性(水深1 500 m)Tab.2 Main physical properties of the combined mooring lines(waterdepth 1 500 m)
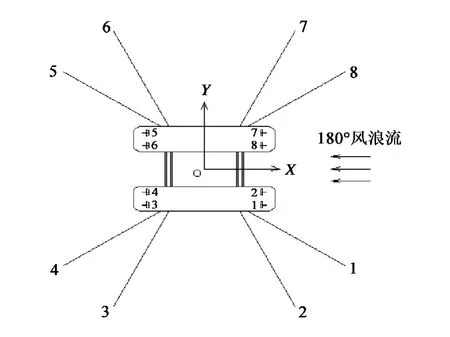
图1 动力定位系统和锚泊系统布置Fig.1 Arrangement of the dynamic positioning system and the mooring system
2.3 海洋环境载荷
本计算中所采用的海况为平台正常作业海况。由于风、浪、流同向时为最恶劣的环境条件,故取风、浪、流同向联合作用作为计算的环境条件,其参数如表3所示。环境载荷作用方向为180°,如图1所示。计算水深为1 500 m。
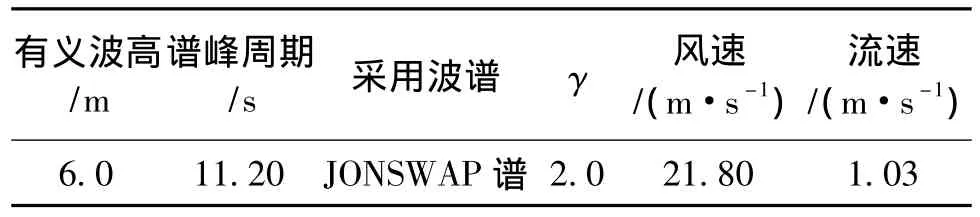
表3 平台作业状态环境条件Tab.3 The environment condition of the platform in operation case
3 数值模拟
将分别对处于完整模式和单缆失效模式的半潜式平台进行数值时域模拟。时域模拟采用DPSEMI软件[15],模拟时间取1 800 s,每24 s进行数据采集和记录,最终得到平台的水平偏移和功率消耗的时历曲线。
由于半潜式平台及锚泊系统的对称性,在此只分析缆1~缆4分别失效而导致平台处于四种不同的单缆失效模式。比较四种单缆失效模式对平台定位精度功率消耗和缆绳张力等的影响。由图1可看出,缆1和缆2对平台作用力与环境载荷方向相反,称为迎风缆;缆3和缆4对平台作用力与环境载荷方向相同,称为背风缆。
平台完整模式和四种单缆失效模式的水平偏移时历如图2所示,功率消耗时历如图3所示,平台偏移和功率消耗统计数据如表4、表5所示,缆绳平均张力变化如表6所示。

图2 不同模式下的平台偏移Fig.2 Offset of the platform under different types

图3 不同模式下的平台功率消耗Fig.3 Power utilization of the platform under different typesl
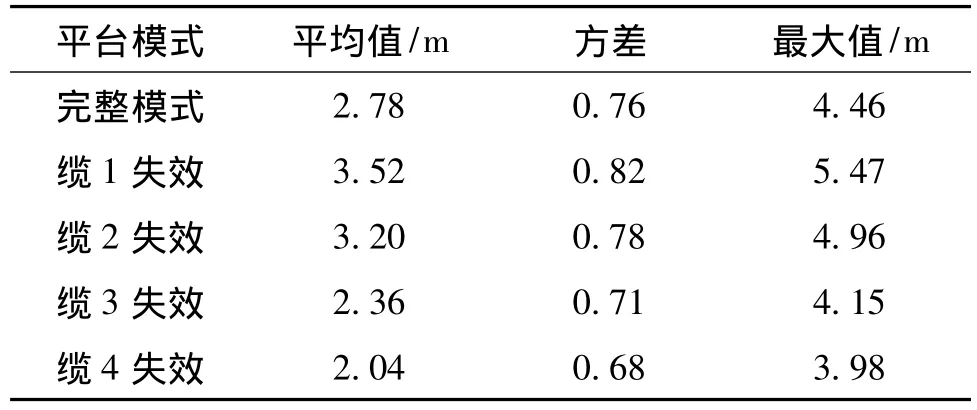
表4 平台水平偏移统计值Tab.4 The statistic values of the platform offset

表5 平台总功率消耗统计值Tab.5 The statistic values of the platform utilized power
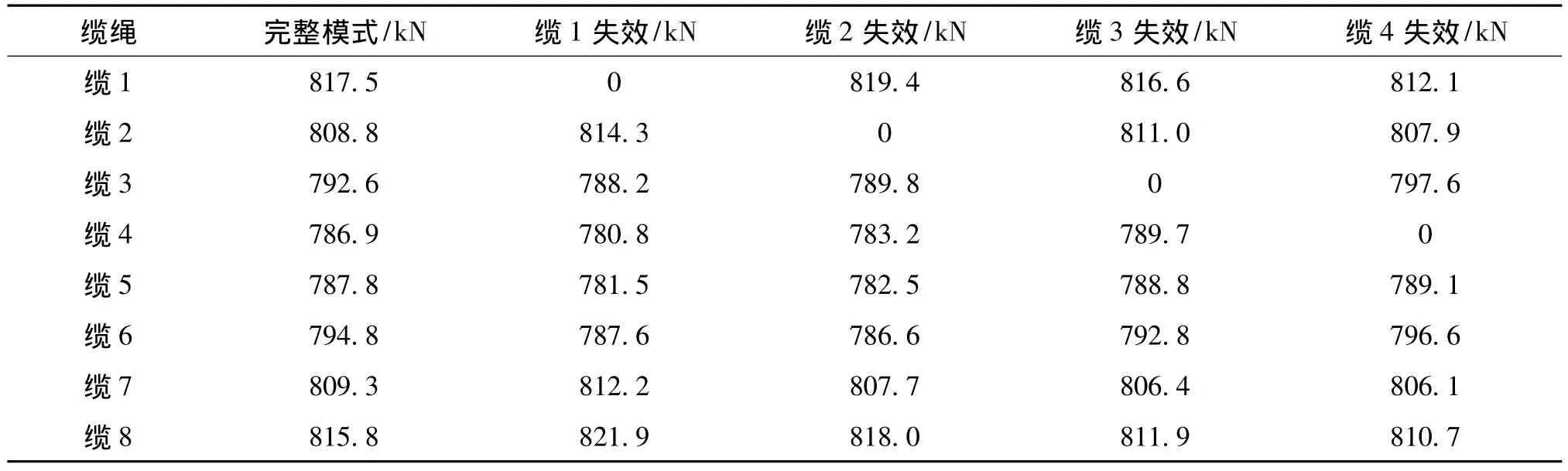
表6 缆绳张力统计值Tab.6 The statistic values of the mooring-line tension
4 结果分析
通过对半潜式平台完整模式和四种单缆失效模式的时域模拟,可以看出单缆失效对平台的定位精度和功率消耗影响。从图2、图3及表4、表5可知,缆1失效和缆2失效都会导致平台水平偏移和功率增大,而缆3失效和缆4失效却导致平台水平偏移和功率减小。其中缆1为张力最大的缆绳,失效导致平台水平偏移增大26.6%,功率增大35.8%,增幅最大;缆4为张力最小的缆绳,失效导致平台水平偏移减小26.6%,功率减小29.0%,降幅最大。这是因为缆1和缆2对平台作用力与环境载荷方向相反,能够抵消部分环境力,故一旦失效,锚泊系统定位能力下降,平台偏移将增大,同时动力定位系统将增大功率来抵抗环境力;而缆3和缆4对平台作用力与环境载荷方向相同,缆绳失效相当于环境力的减小,故平台水平偏移和功率都将减小。
由表6知,四种单缆失效模式对锚泊系统的影响非常小,各根缆绳张力的变化非常小,这是因为变化的载荷绝大部分都由动力定位系统的推力器承担了,这样能够减小缆绳的疲劳破坏,进一步体现了锚泊辅助动力定位系统的优越性。
5 结语
通过分析锚泊辅助动力定位系统单缆失效的影响,可以得出如下结论:
1)总体来说,迎风缆失效会导致平台水平偏移和功率增大,缆绳张力越大,增幅越大;背风缆失效会导致平台水平偏移和功率减小,缆绳张力越小,降幅越大。故在实际工程中需特别注意最大张力缆出现失效情况。
2)在风、浪、流为同向时的最恶劣的环境条件下,松弛背风缆(缆3、缆4),可减少动力定位系统定位功率消耗,降低油耗,增强定位系统的安全性。
3)单缆失效对动力定位系统定位精度和功率消耗影响较大,而对锚泊系统缆绳张力影响却很小,这体现了锚泊辅助动力定位系统的优势。
[1]A B Albers,A A Merchant.The hydrodynamic model testing for closed loop DP assisted mooring[C]∥Offshore Technology Conference.1996.
[2]张炳夫.深水锚泊和动力定位联合定位系统设计研究[D].大连:大连理工大学,2009.
[3]DNV.Offshore standard DNV-OS-E301:Position mooring[S].2010:58-59.
[4]Johan Wichers,Van Dijk.Benefits of using assisted DP for deepwater mooring systems[C]∥Offshore Technology Conference.1996.
[5]Chris Jenman.Mixing dynamic positioning with moorings[C]∥Dynamic Positioning Conference.2005.
[6]Sue Wang.On the assessment of thruster assisted mooring[J].Offshore,2010.
[7]孙 攀.深海半潜式钻井平台锚泊辅助动力定位系统研究[D].上海:上海交通大学,2011.
[8]Asgeir J Sφrensen,Jann Peter Strand,Thor I Fossen.Thruster assisted position mooring system for turret-anchored FPSOs[C]∥International Conference on Control Applications.1999.
[9]李勇跃,王 磊,孙 攀.深水半潜式钻井平台动力定位最优作业方向研究[J].海洋工程,2011,29(1):26-31.
[10]黄 剑,朱克强.半潜式平台两种锚泊系统的静力分析与比较[J].华东船舶上业学院学报,2004,18(3):1-5.
[11]余 龙,谭家华.基于准静定方法的多成分锚泊线优化[J].海洋工程,2005,23(1):69-73.
[12]盛振邦,刘应中.船舶原理(下册)[M].上海:上海交通大学出版社.2004:34-36.
[13]陈 恒.深海半潜式平台动力定位推力系统设计研究[D].上海:上海交通大学,2008.
[14]API-RP2SK,Recommended practice foe design and analysis of station keeping systems for floating structures[S].2005.
[15]MARIN DPSEMI USER GUIDE[M].
Research on the impact of one line failure for a mooring assisted dynamic positioning system
ZHANG Feng,WANG Lei,LI Yong-yue
(State Key Laboratory of Ocean Engineering,Shanghai Jiao Tong University,Shanghai 200030,China)
For a semi-submersible platform,one mooring line may fail when the mooring-assisted dynamic positioning system works in the sea.As an example,a semi-submersible platform has been considered and a mooring-assisted dynamic positioning system has been designed.By using the time domain simulation,the impact of one mooring line failure on the offsets and power utilization of the platform will be analyzed.From the analysis result,it is suggested that under severe conditions,loosing the tension of the leeward lines can reduce power consumption,improve positioning accuracy and the safety of the positioning system,which will be helpful to the further engineering applications of the mooring-assisted dynamic positioning system.
mooring-assisted dynamic positioning system;one mooring line failure;time domain simulation;semi-submersible platform
U676.2
A
1005-9865(2012)03-0029-06
2011-10-27
国家自然科学基金资助项目(51179103);工信部高技术船舶科研基金“深海半潜式钻井平台工程开发”资助项目
张 峰(1988-),男,河南三门峡人,硕士研究生,主要从事锚泊辅助动力定位研究。E-mail:yujue@sjtu.edu.cn
王 磊。E-mail:wanglei@sjtu.edu.cn
猜你喜欢
海洋石油(2021年3期)2021-11-05
中国海上油气(2020年5期)2020-10-20
船舶标准化工程师(2020年5期)2020-10-17
上海海事大学学报(2019年4期)2019-12-30
中国港湾建设(2017年11期)2017-12-19
水利技术监督(2016年6期)2017-01-15
船海工程(2015年4期)2016-01-05
武汉理工大学学报(交通科学与工程版)(2015年5期)2015-12-05
电子设计工程(2014年12期)2014-02-27
船舶力学(2014年5期)2014-01-19