半潜式海洋平台定位系统的控制系统研究
2012-01-08 07:11鄢华林姜飞龙李亚南
海洋工程 2012年3期
鄢华林,姜飞龙,周 超,赵 瑞,李亚南,袁 威
(江苏科技大学机械工程学院,江苏镇江 212003)
半潜式海洋平台定位系统的控制系统研究
鄢华林,姜飞龙,周 超,赵 瑞,李亚南,袁 威
(江苏科技大学机械工程学院,江苏镇江 212003)
以海洋平台定位系统作为研究对象,阐述了平台定位的主要组成和工作原理,设计了满足速度控制、同步控制和恒张力控制的不同运行模式下的系泊绞车液压系统,分析了液压系统各主要元件在系统中的作用。采用伪微分反馈控制算法对系泊绞车进行控制,并给出了同步控制的策略和恒张力的计算调定方法。Matlab仿真表明,伪微分控制算法具有很好的动态响应特性,完全满足海洋平台系泊定位的要求。
海洋平台;系泊定位;液压系统;伪微分控制
海洋平台的定位方式随深度可分为自升式固定平台、半潜式锚泊定位平台和深水动力定位平台,这里研究的是半潜式海洋平台锚泊定位控制系统。由中央计算机控制八台基于PLC控制的系泊绞车,通过风浪检测、波浪预报,协调八台系泊绞车以速度控制、同步控制和恒张力控制的不同运行模式,实现海洋作业平台的定位和系泊安全。
海洋平台自身并无驱动动力,定位时靠辅助抛锚船只抛锚,单台系泊绞车运行时,采用速度控制;两台同时拖曳时,采用同步控制,以保证拖曳力的均匀分配。
定位后的常态下,海洋平台的定位由系泊绞车制动予以实现;当海浪预报系统检测到海浪时,中央计算机依据风力风向等海况,自动设定每台系泊绞车的工作参数。即迎着风浪端的绞车处于制动状态,背着风浪端的绞车应处于恒张力收缆状态。
当海浪的作用消除之后,各台绞车恢复到常态。由于平台的每一侧均由多台绞车同时进行系泊,所以这几台绞车都应保持张力近似相等以免缆绳受力不均而拉断。
海洋平台一般采用多点系泊定位的方式,一般来说,系泊的点数多于4点,并且成偶数对称分布,本研究的海洋平台定位系统采用8点系泊定位,如图1所示。
1 海洋平台定位方式
在抛锚的过程中,逐个进行,采用单点系泊速度控制的方式进行收紧;为了防止单点系泊绞车受力过大,采用在海洋平台的每个角布置两台绞车的方式,若要两台绞车的张力一致,则需要采用同步张紧的方式。在海浪预报系统检测到海浪时,背着海浪一侧的所有绞车应处于恒张力状态,此时海洋平台由于系泊绞车恒张力的作用而下沉;为了防止海洋平台发生倾翻,迎着风浪的绞车制动,保证了海洋平台的安全定位。
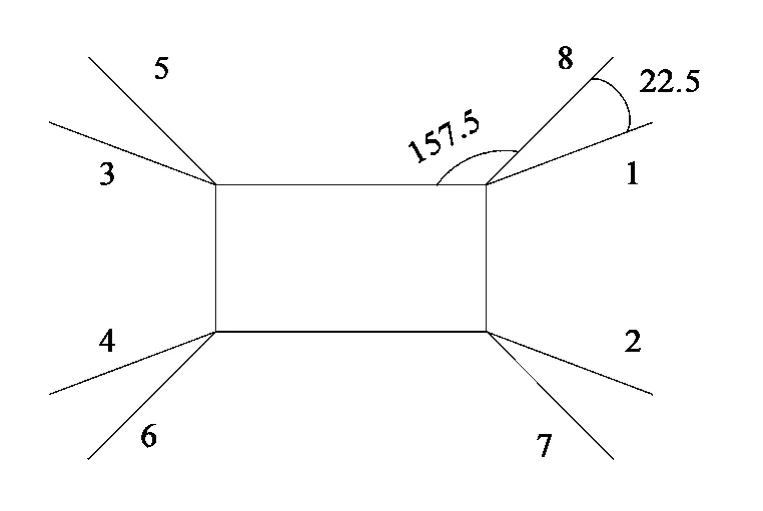
图1 锚泊系统布置示意Fig.1 Layout of mooring system
2 液压系统组成及原理
2.1 液压系统组成
整个系统有八台系泊绞车,每台绞车都由一台定量马达驱动,每两台由一组PSV两路比例阀控制,每组有一块主块和分别控制两台绞车的两路比例换向阀;主块包括安全阀和减压阀,比例换向阀含有定差减压阀和一个梭阀,定差减压阀和与换向阀的节流口串联,形成调速功能,使速度与载荷无关。梭阀的作用是比较两路的压力大小,取较大者反馈到变量泵的负载敏感口使泵的压力比该压力略高。能源机构采用电动机驱动的变量柱塞泵,与PSV两路比例阀配合,使整个液压系统具有根据载荷情况提供工作所需的压力、流量的负载敏感特性,对于这样的大功率系统,节能是必须考虑的。
2.2 液压回路的切换
每台绞车都能实现三种功能,速度控制、恒张力控制和两台绞车间的同步控制,如图2所示,两位两通换向阀失电时,为速度控制和两台绞车间的同步控制,两位两通得电时,为恒张力控制。
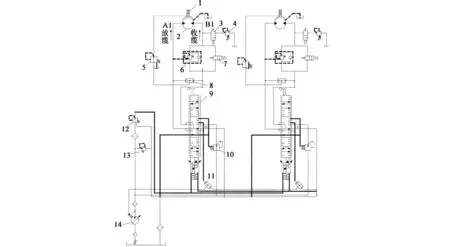
图2 系泊绞车同步恒张力系统原理Fig.2 Diagram of mooring winch of synchronous constant tension
在两种定位状态下,实现切换的二位二通换向阀的得失电状态如下表1所示。
负载平衡与制动:在液压系统中,平衡阀起到平衡负载的作用,确保在大范围控制负力矩下放速度,有效防止速度失控,使锚链等重物平稳下放;更可起软管破损失压时,自动切断油路,平衡负载,防止负载自行下落的自动保护作用。平衡阀属液控单向节流设计,实现了液控单向阀和单向节流阀的控制功能。当其控制油口不工作时,平衡阀具有单向阀和反向封闭的功能,即有制动负载功能,当控制油口有一定压力油,则平衡阀的开口面积、开启压力、和开口压差决定了液压阀反向的流量,这本身取决于液压马达的另一端口的进口流量,从而防止液压马达失控。除了平衡阀起到制动作用外,系统还设置了弹簧摩擦制动,当比例阀处于中位,由于中位机能是Y型机能,制动油缸的油通过梭阀、多路比例阀中位回到油箱,摩擦制动器依靠弹簧力摩擦制动。
收放缆回路:当绞车处于收缆工作状态时,多路比例阀处于下位机能,来自多路比例阀的压力油经过梭阀,进入制动器油缸,将制动器打开,与此同时主油路上,来自多路比例阀的压力油经过平衡阀中的单向阀进入马达的B1口,驱动油马达,由A1口通过多路比例阀回油箱,马达带动卷筒实现收缆;当绞车处于放缆工作状态时,则马达的A1口作为进油口,B1口作为回油口,依靠平衡阀平衡负载,完成锚链等重物平稳下放。

表1 两种工况电磁阀得失电Tab.1 Gains and losses of solenoid valve of two kinds of working conditions
2.3 同步控制的实现
两台绞车同步闭环控制的方法分为:同等式同步控制和主从式同步控制。
主从式同步控制系统相对于同等式同步控制较复杂,所以在选择同步控制系统时,需要综合考虑系统的简单程度以及系统的控制精度的需要。本系统相对而言,不需要太高的精度和较复杂的计算控制,所以选用主从式同步控制方法,选择其中的一台绞车作为主动,另外一台绞车做随动跟踪运动控制。每台绞车有一个导向轮,把锚链导到船弦外,在导轮轴上安装有编码器和张力测量装置,作为速度闭环系统和恒张力闭环系统的检测元件,做随动跟踪运动控制的绞车以自身导轮检测装置为闭环检测元件,以主动运动的绞车导轮检测装置为给定信号,实现速度的闭环控制。
2.4 恒张力的实现
当需要恒张力的工况时,与平衡阀并联的二位二通换向阀连通,油液直接通过二位二通换向阀,而不通过平衡阀;与此同时连接在马达进油口比例溢流阀前方的二位二通换向阀处于连通状态,通过调节马达进油口比例溢流阀的溢流压力,与马达回油口(通常情况下取0 MPa或者0.5 MPa)之间形成压差,来设定和控制马达的转矩,以PDF控制算法,控制比例溢流阀的压力,以张力检测为测量元件,实现张力的闭环控制,即实现了对缆绳恒张力的控制,其张力的大小可以通过计算得到:

其中:i为马达与绞车卷筒之间的传动比,Dm为马达排量,Δp为马达两腔压差,R为绞车卷筒半径。
将实际通过张力传感器测量的张力大小与输入的理想张力进行比较,其差值通过采用PLC编写或者VC++、C++Builder实现的伪微分控制器(PDF)进行运算以消除误差,通过PLC拓展模块输出电压,控制马达回油口比例溢流阀的溢流压力,使得马达两端口的压差保持恒定,进一步保证卷筒的扭矩恒定,从而保证了缆绳张力的恒定。

图3 恒张力控制系统方块图Fig.3 Block diagram of constant tension control system
3 系统仿真
液压马达转角对电液伺服阀阀芯位移的传递函数为:

其中:Kq为阀的流量增益;Kce为流量系数,Kce=Kc+Ctm;Kc为阀的压力系数;Ctm为马达总泄露系数;Dm为马达排量;Xv为阀芯位移量;Vt为马达与阀之间的容积;βe为有效体积弹性模量。

为了便于仿真和考察伪微分特性,各个参数取值如表2所示[6]。

表2 电液伺服系统主要参数Tab.2 Main parameters of electro-hydraulic system
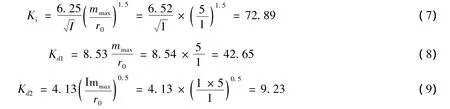
把以上各个参数代入计算,得液压马达转角对电液伺服阀阀芯位移和马达力矩的传递函数为:

PDF控制器各个参数取值如下[7]:
取4级海况,波周期约为6 s,幅值为2.5 m的正弦波进行仿真(见图4)。从仿真结果可以看出,伪微分具有很好的动态特性,可以在恒张力状况下很好地跟随波浪收放缆绳实现对海洋平台的定位。
考虑定位过程中缆绳在突然受到波浪时的影响,取400 kN时恒张力阶跃信号进行仿真。通过仿真考察了缆绳恒张力受正弦波浪的影响,在没有采用伪微分控制之前,缆绳的张力由0 kN突然增加到400 kN,在采用伪微分控制之后,缆绳张力在1~2 s之间均匀变化,防止了缆绳由于突然受力过大而被拉断,同时又不影响海洋平台的定位,如图5所示。
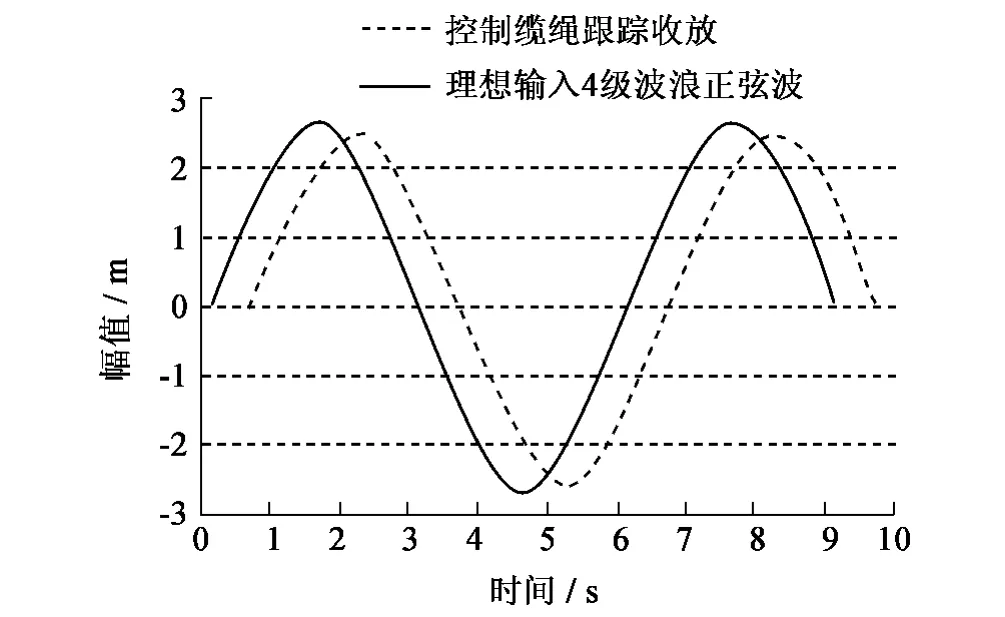
图4 正弦波仿真结果Fig.4 Simulation results of sine wave
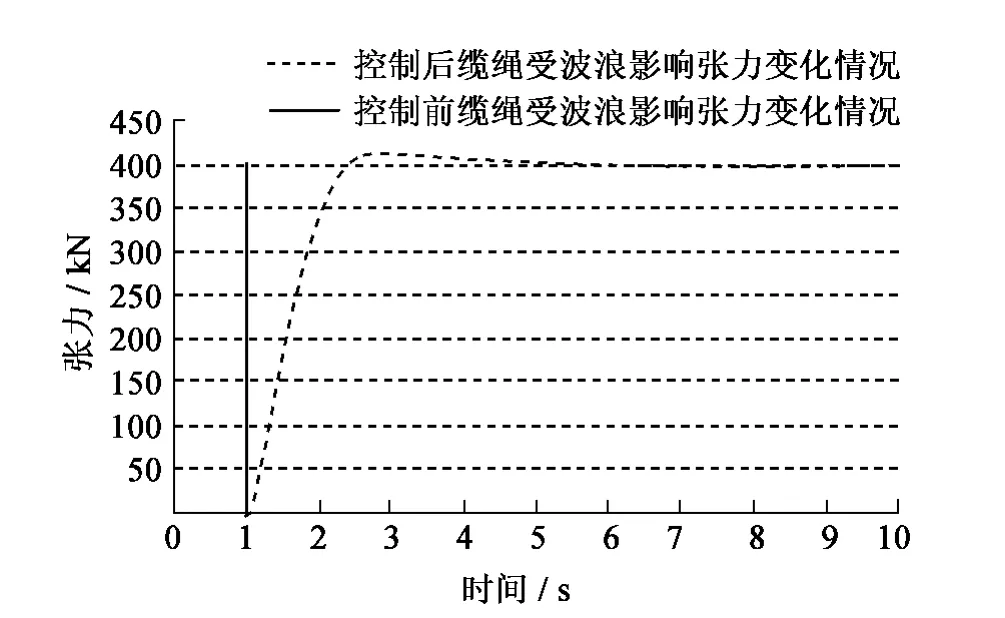
图5 波浪扰动恒张力变化图Fig.5 Constant tension change result from wave disturbance
4 结语
1)在半潜式海洋平台定位系统中,针对单点速度控制、同步控制和恒张力控制,在液压系统中采用两位两通换向阀实现了不同控制状态下液压系统之间的切换。
2)在半潜式海洋平台定位过程中,平台每一个角的两台处于恒张力状态的绞车之间的油路采用并联的方式进行连接。
3)通过调定液压马达回油口溢流阀的溢流压力,与进口溢流阀之间形成压力差,设定绞车的张力,来达到绞车保持恒定张力的目的。
4)伪微分控制算法具有很好的随动特性,完全满足半潜式海洋平台定位过程中跟踪波浪和缆绳恒张力控制稳定性的要求。
[1]吴茂根,邱秀敏,王庆丰,等.实用电液比例技术[M].杭州:浙江大学出版社,1993.
[2]姜飞龙.半潜式海洋平台定位系统的控制系统研究[D].镇江:江苏科技大学,2012.
[3]王 辉.变节距排缆减张力液压绞车的系统研究[D].镇江:江苏科技大学,2010.
[4]鄢华林,姜飞龙,赵 瑞,等.一种新型波浪补偿系统研究[J].中国造船,2011,52(2):154-160.
[5]王春行.液压控制系统[M].北京:机械工业出版社,2004.
[6]范国宏.电控排缆绞车电液控制系统研究[D].杭州:浙江大学,2003.
[7]鄢华林,姜飞龙.海洋平台吊机波浪补偿控制系统研究[J].液压与气动,2011(2):22-25.
[8]王海波,王庆丰.水下拖曳升沉补偿系统设计及其内模鲁棒控制[J].机械工程学报,2010,46(8):128-132.
[9]熊 涛.基于MATLAB/SIMULINK的 PDF控制系统设计[J].计算机仿真,2003(11):51-52.
Research on semi-submersible ocean platform location control system
YAN Hua-lin,JIANG Fei-long,ZHOU Chao,ZHAO Rui,LI Ya-nan,YUAN Wei
(School of Mechanical Engineering,Jiangsu University of Science and Technology,Zhenjiang 212003,China)
Ocean positioning platform is taken as the research object.The main structure and the principle are specified.The hydraulic mooring winch system positioning the ocean platform is designed to run under different modes,speed control,synchronous control and constant tension control as arranged.The role components in the hydraulic system are analyzed.The way to calculate and set the constant tension is introduced,and Pseudo-derivation feedback control is adapted to control the mooring winch.Matlab is used in simulation and advantages can be seen from the simulation result:pseudo-derivation feedback control with good dynamic response can meet the need to moor the ocean platform and will have broad application prospects in other areas.
ocean platform;mooring position;hydraulic system;pseudo-derivation feedback control
P751
A
1005-9865(2012)03-0145-05
2011-10-27
江苏省研究生科技创新计划资助项目(CXLX11_0285)
鄢华林(1957-),男,江西高安人,高工,硕士生导师,从事电液伺服控制、海洋装备研究。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
山东冶金(2022年2期)2022-08-08
制造技术与机床(2017年2期)2017-05-04
工业设计(2016年11期)2016-04-16
同煤科技(2015年4期)2015-08-21
舰船科学技术(2015年8期)2015-02-27
航天返回与遥感(2014年5期)2014-07-31
河南科技(2014年24期)2014-02-27
河南科技(2014年12期)2014-02-27
郑州大学学报(理学版)(2013年2期)2013-03-11