无闭轨Lienard系统拓扑分类中结构α3β4和α3β6的实现
2011-12-27 03:50李晓月
东北师大学报(自然科学版) 2011年4期
李晓月,王 克,2
(1.东北师范大学数学与统计学院,吉林长春 130024;2.哈尔滨工业大学(威海)数学系,山东威海 264209)
无闭轨Lienard系统拓扑分类中结构α3β4和α3β6的实现
李晓月1,王 克1,2
(1.东北师范大学数学与统计学院,吉林长春 130024;2.哈尔滨工业大学(威海)数学系,山东威海 264209)
在对无闭轨Lienard系统完整拓扑分类72种的基础上,证明了其中与结构A+B+C+D+0相对应的16种拓扑结构,即结构α3β4-1,…,α3β4-4以及结构α3β6-1,…,α3β6-12都是可以实现的,并给出每一种拓扑结构具有实现性的充分条件.
Lienard系统;闭轨;拓扑分类;Gauss球面;Filippov变换
0 引言
众所周知,Lienard系统

其中f,ɡ:R→R连续,且xɡ(x)>0,x≠0.它是一类经典的二阶微分系统,在医学、物理、机械、通讯等许多实践领域中都有着广泛的应用[1-2],可以用来描述心脏的跳动,电路的循环,传送带的振荡器的作业以及通讯设备的工作状况等.它包含许多具有实际应用背景的具体方程为特例,譬如:van der Pol方程[3]

其中μ是正常数.以及在考虑无线电通信技术问题时[4-5]遇到的方程

其中L,r,C是正常数,分别代表感应系数、电阻和电容,x是电流强度.
由于在实践研究中的重要性,因而对方程(1)或它的等价平面系统

对于Lienard系统各种定性性质的研究,例如稳定性、解的有界性、振动性、极限环的问题以及其他定性性质的研究,已经有一批学者做了许多很好的工作.关于特定类型的微分系统的拓扑分类问题无疑是基本的理论问题,其解决将使人们对该类微分系统的认识进一步的深化,对各种性质的研究工作具有很大的推动作用,对应用技术的研发提供一个统一的理论平台.
文献[6-9]曾研究结构稳定的没有极限环的二次系统的拓扑分类问题,文献[10]研究了在系统轨道具有镜像对称性条件保证下,Lienard系统相平面轨线的拓扑分类问题.这些工作虽然都已经取得很大进展,但至今,问题仍未彻底解决.由此可以看出拓扑分类问题一般是难度较大且非常繁杂的.
Lienard系统是一种基本的微分系统.但对无条件限制的Lienard系统的拓扑分类问题,目前系统的研究工作还很少.一个主要原因是Lienard系统一般来说并不是多项式系统.因此使用研究二次系统拓扑分类的方法来研究Lienard系统是很困难的.文献[11-14]采用了不同于文献[6-9]的方法研究了无闭轨Lienard系统的拓扑分类问题,得到了完整的结果,证明了无闭轨Lienard系统共有72种可能的拓扑结构.
对于无闭轨Lienard系统进行拓扑分类是重要的,但是对于拓扑分类的可行性和实现性的证明更加重要,因为只有这样,才更能说明该种分类的合理性和意义.以往很少有文献在对Lienard系统进行拓扑分类的基础上,考虑其实现性的问题.在此方面文献[10]做了一些很好的工作.但所考虑的Lienard系统都是有条件限制的,因此对于Lienard系统的分类并不是彻底的,可能存在的拓扑结构要少很多,实现性的证明也要简单一些.
为此,我们在文献[11-14]对无闭轨Lienard系统进行完整拓扑分类的基础上,证明了72种可能存在的拓扑结构的每一种都是有可能实现的,即举出满足一定条件的Lienard方程的例子来说明其具有72种可能存在的拓扑结构的一种.本文证明了其中的16种拓扑结构都是可以实现的,并给出每一种拓扑结构具体实现的充分条件.
在本文中,考虑了比方程(1)稍广泛的平面系统方程(5)是无闭轨的.令

采用和文献[11]相同的记号,把系统(5)的轨线分为以下5类:
定理1无闭轨Lienard系统(5)的轨线可以分为9类:第一类用A+0表示,包括所有其轨线属于A∪O的无闭轨Lienard系统;第二类用B+0表示,包拓所有其轨线属于B∪O的无闭轨Lienard系统;第三类用A+C+0表示,包括所有其轨线属于A∪C∪O的无闭轨Lienard系统.类似的,其余6类分别是:B+C+0,A+D+0,B+D+0,A+C+D+0,B+C+D+0,以及A+B+C+D+0.它们的定义完全可以类似上面写出,此处从略.为方便起见,把原点O(0,0)记为点0.
定理2在Gauss球面上,0点有3种可能性:(α1)没有椭圆扇形;(α2)有一个有界椭圆扇形;(α3)有一个无界椭圆扇形.
定理3在Gauss球面上,奇点∞有如下6种可能性:(β1)没有椭圆扇形;(β2)只有一个有界椭圆扇形(不连接0与∞);(β3)只有两个有界椭圆扇形,此外无其他D类轨线;(β4)只有一个无界椭圆扇形;(β5)有两个有界椭圆扇形,且存在D类轨线,它与∞点构成的奇闭轨所围成的闭区域包含这两个椭圆扇形在内;(β6)只有一个有界椭圆扇形和一个无界椭圆扇形.
定理4若α3,β4成立,则系统(5)有4种可能的拓扑结构:α3β4-1,α3β4-2,α3β4-3和α3β4-1.
定理5若α3β6成立,则系统(5)有12种可能的拓扑结构:α3β6-1,α3β6-2,…,α3β6-12.
本文的主要安排如下:首先证明了4种拓扑结构α3β4-1,…,α3β4-4是可以实现的,并给出每一种拓扑结构具体实现的充分条件;接着证明了拓扑结构α3β6-1,…,α3β6-12都是可以实现的,并给出每一种拓扑结构具体实现的充分条件.
其中F,ɡ:R→R连续,且F(0)=0,xɡ(x)>0,x≠0,且总假设系统(5)的轨线满足唯一性.本文总假设
Filioppov变换的方法[15]在Lienard系统的研究工作中有广泛的应用.我们在今后也要大量应用这个方法,首先对Lienard系统(5)作Filippov变换,则

1 4种α3β4结构的实现
1.1 α3β4-1,…,α3β4-4的实现
首先在右半平面考虑Lienard系统

易见(8)式的奇点0是一个退化结点.容易证明对Y+上的任意点A,γ+(A)必与F+相交于点B,然后进入奇点0.令点A沿Y+向上方趋于无穷,则B点将沿直线y=2x向右上方趋于无穷.作直线x=1,设直线x=1与直线y=2x相交于点C.则当y A足够大时,将有y B>y C.这时γ+(B)将与直线x=1相交于点D.当点A沿Y+向上运动时,D点将沿直线x=1向下运动,但始终保持在点(1,0)的上方.故当A沿Y+向上方趋于无穷时,D点必有极限点D*,且y D*≥0.容易证明y D*>0.

图1 方程(8)的局部轨线结构
在Y-上任取一点E,则γ-(E)必与直线x=1相交于G.令E点沿Y-向上趋于点0,则G点沿直线x=1向上运动,并趋于点G*.显然应有y G*≤y D*.见图1.下面我们要证明y G*=y D*,即G*=D*.
容易求出(8)式的通解为

其中C1,C2为任意常数.在直线y=2x上取点B(a,2a),a>0,则容易求得过点B的(8)式的轨线γ(B)的方程为

由(11)式减(10)式得

由(11)式比(10)式得
因为a>0,由(13)式易见y D>1.故y D*≥1.若y D*>1,则在(13)式的两端令a→+∞,也就是令B点沿直线y=2x向右上方趋于无穷.此时D→D*,故(13)式的左端y D→y D*.因为a→+∞时,

由此y D*=1,矛盾.即D*的坐标为(1,1).
取点e(0,b)∈Y-,b<0.则由(9)式求得过点E的(8)式的轨线γ(E)的方程为

类似上面的证明,由(14),(15)式消去t得到

用类似上面的分析得到如下的结论:在直线y=-2x上任取一点H,则γ+(H)必与Y+相交于点I,而γ-(H)将进入奇点0.若x H<-1,则γ-(H)必与直线x=-1相交于点J.当点H沿直线y=-2x向左上方趋于无穷时,I点将沿Y+向上方趋于无穷.而J点将向下趋于一点J*,且y J*=1.在Y-上任取一点E,则γ+(E)将与直线x=-1相交于点K,当点E沿Y-向上趋于点0时,K点将向上趋于点J*.
现在考虑平面Lienard系统


图2 方程(19)的轨线结构
综合上面对系统(8)和系统(18)的讨论.我们断言在Gauss球面上,系统(19)的奇点0具有一个无界的椭圆扇形,∞点具有一个无界的椭圆扇形.而γ(D*)∈A和γ(J*)∈B为这两个椭圆扇形的分界线.0点和∞点没有抛物扇形.因而系统(19)具有结构α3β4-1.见图2,为了方便起见,今后我们仍用通常的方式,把系统的全局结构画在一个圆内,但要注意把整个圆周看成一个点,即∞点.
现在令
我们在右半平面考虑方程

在折线y=p(x)上取点A1,x A1>1.设过点A1的系统(8)和系统(20)的轨线分别为γ(8)(A1)和γ(20)(A1).显然当x>1时有p(x)>2x;而当0≤x≤1时,p(x)=2x.
γ(+20)(A1)必与直线x=1相交于点L.令点A1沿折线y=p(x)向右方运动,则点L将沿直线x=1向下运动,由比较定理易知,γ+(8)(A1)位于γ+(20)(A1)的右下方.由此推得y L≥y D*.因而若A1点沿折线y=p(x)向右方趋于无穷时,L点将沿直线x=1向下趋于某一点L*,且y L*≥y D*.

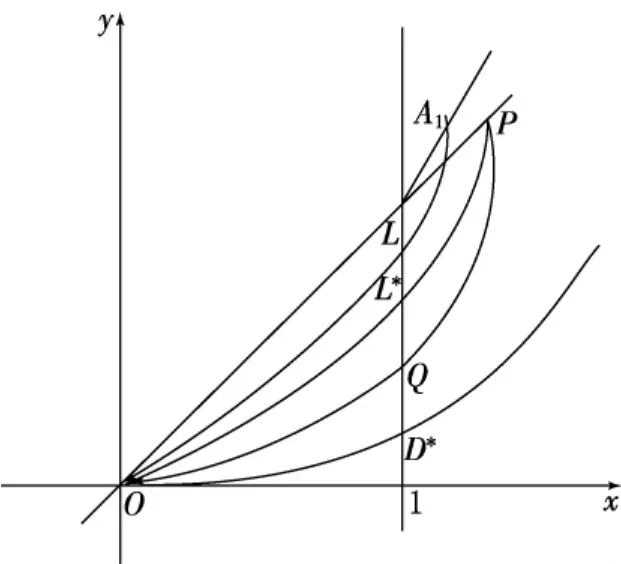
图3 方程(20)的局部轨线结构
由上面的讨论易知Lienard系统

具有结构α3β4-2.见图4.

图4 方程(21)的轨线结构
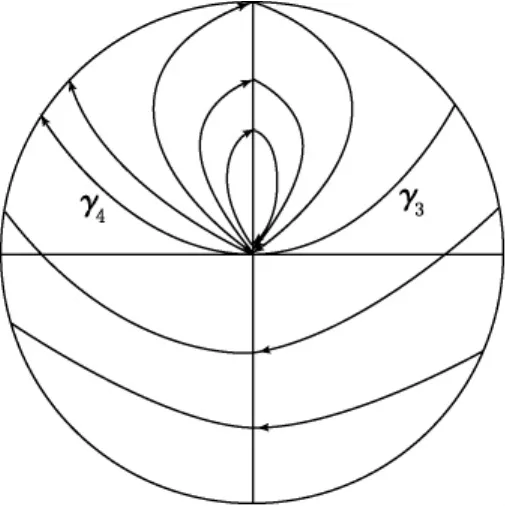
图5 方程(22)的轨线结构

图6 方程(23)的轨线结构

具有结构α3β4-4.见图6.于是我们已证明了如下定理:
定理6拓扑结构α3β4-1,α3β4-2,α3β4-3和α3β4-4都是能够实现的.
1.2 一般性定理
定理7设G(±∞)=+∞.

注意函数P(u)与前面定义的函数p(x)在性质上的相似之处,在左半平面,系统(5)仍与系统(18)等价.完全类似于前面对系统(20)的讨论,我们可以对系统(28)施以同样的论证.可以证明,系统(28)的奇点0在右半平面有一个由A类轨线构成的抛物扇形.于是系统(5)的奇点0在右半平面也有一个由A类轨线构成的抛物扇形.亦即系统(5)也具有结构α3β4-2.
和2°的证明类似,3°和4°的证明也完全类似于对系统(22)的证明,以及对系统(23)的讨论.为简捷起见,此处从略.
2 12种α3β6结构的实现
2.1 α3β6-1,α3β6-7,α3β6-11的实现
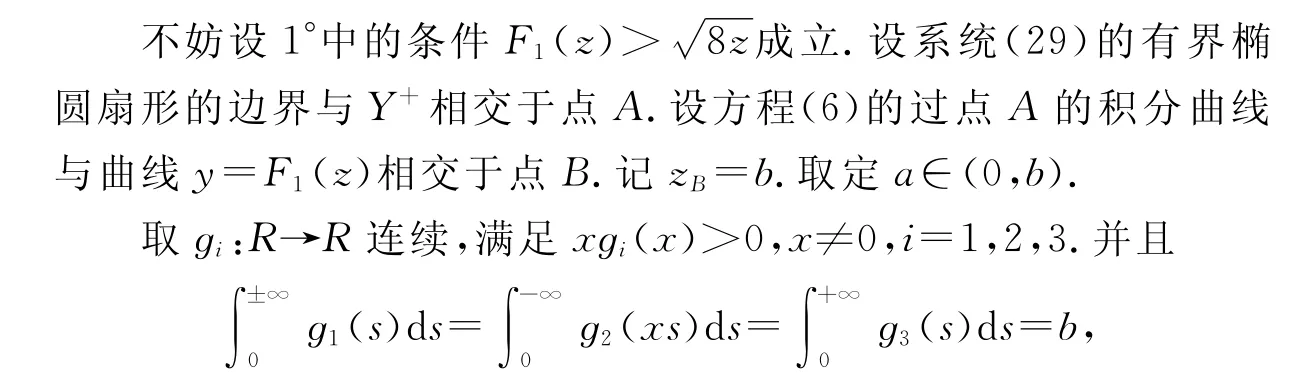
设F1(z),z>0,连续.F1(0)=0,且满足:


引理1系统(29)具有一个有界的椭圆扇形,椭圆扇形的外面被闭轨所充满.

图7 方程(30)的局部轨线结构
证明对系统(29)实行Filippov变换,则系统(29)在右、左二半平面都与方程(6)等价.由条件1°知系统(29)的0点存在一个椭圆扇形.由条件2°知此椭圆扇形是有界的,且系统(29)无D类轨线.因为系统(29)在右、左二半平面都与方程(6)等价,由向量场的对称性易证椭圆扇形以外的系统(29)的轨线都是闭轨.

证明对系统(30)实行Filippov变换,则系统(30)在右、左二半平面都与方程(6)等价,其中z∈(0,b).参考系统(29)的性质,容易证明如下结论:
(1)对Y+上的点P,y P∈(0,y A),系统(30)的过点P的轨线γ(30)(P)∈C.0点的椭圆扇形的边界轨线向左右无限延伸.故系统(30)的0点有一个无界的椭圆扇形.
(2)对Y+上的点P,y P≥y A,γ(30)(P)∈D.故∞点有一个有界的椭圆扇形.
(3)对任意点P∈Y-,γ(30)(P)∈D.故∞点还有一个无界的椭圆扇形.
(4)系统(30)只有一条A类轨线和一条B类轨线.它们在Filippov变换下,都对应于方程(6)的过点B的积分曲线在曲线y=F1(z)下方的一段曲线.见图7.因而系统(30)具有结构α3β6-1.
定理9系统

具有结构α3β6-11.
证明对系统(31)实行Filippov变换,则系统(31)在右、左二半平面都与方程(6)(z∈(0,a))以及方程(7)(z∈(0,b))等价.
在z-y右半平面内的曲线y=F1(z)上取点C(a,F1(a)).设方程(6)的过点C的积分曲线与Y+相交于点D.因为a<b,故点D在点A的下方.定义

设方程(6)的过点A的积分曲线与直线相交于点E和G,且y<y.记点H为过点D的积分曲
GE线与直线的位于曲线y=F(z)之下的交点.回到x-y右半平面.设点G和点H的对应点分别
1为G′和H′,γ(H′)∈A.它们都在直线x=x H′上.而C点在对应点为y=F(z)上的横坐标为∞的点.容易证明如下结论:

图8 方程(31)的局部轨线结构
(1)对任意的P∈Y+,y P∈(0,y D),γ(31)(P)∈C,0点的椭圆扇形的边界轨线向右方无限延伸,故系统(31)的0点有一个有界的椭圆扇形;
(2)对任意的P∈Y+,y P∈[y D,y A),γ(31)(P)∈B,0点有一个B类抛物扇形;
(3)对任意的P∈Y+,y P≥y A,γ(31)(P)∈D,系统(31)的∞点有一个有界的椭圆扇形;
(4)对任意的P∈Y-,γ(31)(P)∈D,∞点有一个无界的椭圆扇形;
(6)系统(31)只有一条B类轨线向左趋于无穷,见图8.
因而系统(31)具有结构α3β6-11.
定理10系统

具有结构α3β6-7.
证明与定理9的证明类似.故从略.
2.2 α3β6-4,α3β6-12,α3β6-8的实现
设系统(5)满足G(±∞)=+∞,且对系统(5)实行Filippov变换后有z,z>0.由定理7知系统(5)具有结构α3β6-1.即系统(5)的0点具有一个无界的椭圆扇形,位于上半平面;∞点具有一个无界的椭圆扇形;且系统(5)具有一条A类轨线和一条B类轨线,分别位于第一和第二象限.
取点A1∈Y+.设方程(6)的过点A1的积分曲线与曲线y=F1(z)相交于点B1.记z B1=b1.取定a1∈(0,b1).取ɡ1:R→R连续,满足xɡi(x)>0,x≠0,i=4,5,6.并且



图9 方程(34)的局部轨线结构
(1)对任意的P∈Y+,y P∈(0,y A1),γ(34)(P)∈C,0点的椭圆扇形的边界轨线向左右无限延伸,故系统(34)的0点存在一个无界的椭圆扇形;
(2)对任意的P∈Y+,y P≥y A,γ(34)(P)∈D,∞点存在一个有界的椭圆扇形;
(3)对任意的P∈Y-,γ(34)(P)∈D,∞点存在一个无界的椭圆扇形;B类抛物扇形,见图9.
故定理11成立.
定理12系统

具有结构α3β6-12.
证明对系统(35)实行Filippov变换,则系统(35)在右、左二半平面分别与方程(6)(z∈(0,a1))以及方程(7)(z∈(0,b1))等价.


图10 方程(35)的局部轨线结构
(1)对任意的P∈Y+,y P∈(0,y D1),γ(35)(P)∈C,0点的椭圆扇形的边界轨线向右方无限延伸,故系统(35)的0点有一个无界的椭圆扇形;
(2)对任意的P∈Y+,y P∈[y D1,y A1),γ(35)(P)∈B,0点有一个B类抛物扇形;
(3)对任意的P∈Y+,y P≥y A1,γ(35)(P)∈D,∞点有一个有界的椭圆扇形;
(4)对任意的P∈Y-,γ(35)(P)∈D,∞点还有一个无界的椭圆扇形;
故系统(35)具有结构α3β6-12.

具有结构α3β6-8.
证明与定理12的证明类似.故从略.
对以上的6种α3β6型结构,即α3β6-1,α3β6-4,α3β6-7,α3β6-8,α3β6-11和α3β6-12的实现问题,我们是采用把已知的结构向左右两边无限“拉开”的办法来获得所需要的结构.对其余6种α3β6型结构的实现问题,我们将采用“拼接”技巧来解决.
2.3 α3β6-5,α3β6-9,α3β6-6,α3β6-10,α3β6-2,α3β6-3的实现
引理2若(x(t),y(t)),t∈R,是系统(5)的轨线,则对任意k≠0,(kx(t),ky(t)),t∈R是系统

证明由ɡ7和F(7)的构造知,系统(38)的左半平面的相图等同于系统(30)在左半平面的相图,而系统(38)的右半平面的相图则是下面的系统(39)在右半平面的相图.由定理8知系统(30)具有结构α3β6-1.考虑系统

由引理2知系统(39)的相图是把系统(33)的相图以原点为中心扩大k1倍而得到的.由k1的定义知,k1D=A.设k1A=Q.于是由系统(33)的性质知:


证明系统(40)在右半平面的相图与系统(30)在右半平面的相图一样,而系统(40)的左半平面的相图则是由系统(31)在左半平面的相图以原点为中心扩大k1倍而得到的.其余证明类似定理14,此处从略.

系统(41)的相图是由系统(30)的右半相图与系统(34)的左半相图拼成的,而系统(42)的相图则是由系统(30)的左半相图与系统(34)的右半相图拼成的.详情从略.
[1]CESARI L.Asymptotic behavior and stability problems in ordinary differential equations[M].Berlin:Springer-Verlag,1963:1-70.
[2]SANSONE G,CONTI R.Equazioni differenziali non lineari[M].Roma:Cremonese,1956:20-100.
[3]VAN DER POL B.Sur les oscillations de relaxation[J].The Philos Magazine,1926,7:978-992.
[4]CARTAN H,CARTAN E.Note sur la génération des oscillations entretenues[J].Ann P T T,1925,14:1196-1207.
[5]CONTI R,SANSONE G.Non-linear differential equations[M].New York:Pergamon,1964:35-81.
[6]SANTOS G T.Lecture notes in math[M].Berlin:Springer,1977,597:605-640.
[7]蔡燧林.“关于一类二次系统的极限环存在的估计”一文的注记[J].浙江大学学报:自然科学版,1979(4):105-113.
[8]朱德明.结构稳定的无环二次系统的拓扑分类[J].南京大学学报:自然科学版,1986,22(2):263-273.
[9]史松龄.无环二次系统的拓扑分类[J].中国科学院研究生院学报,1986(1):1-120.
[10]SUGLE J,HARA T.Classification of global phase portraits of a system of lienard type[J].J Math Anal Appl,1995,193:264-281.
[11]王克.无闭轨Lienard系统的拓扑分类(Ⅰ):九种粗结构[J].东北师大学报:自然科学版,1998,31(4):1-6.
[12]王克.无闭轨Lienard系统的拓扑分类(Ⅱ1):64种可能性[J].东北师大学报:自然科学版,1999,32(2):1-5.
[13]王克.无闭轨Lienard系统的拓扑分类(Ⅱ2):64种可能性[J].东北师大学报:自然科学版,1999,32(4):14-18.
[14]王克,李晓月,李文学.无闭轨Lienard系统的8种新轨线结构[J].东北师大学报:自然科学版,2010,42(3):1-6.
[15]张芷芬,丁同仁,黄文灶,等.微分方程定性理论[M].北京:科学出版社,1985:203-240.
Realization of the structuresα3β4andα3β6 based on the topological classification of lienard systems without closed orbit
LI Xiao-yue1,WANG Ke1,2
(1.School of Mathematics and Statistics,Northeast Normal University,Changchun 130024,China;2.Department of Mathematics,Harbin Institute of Technology(Weihai),Weihai 264209,China)
Lienard systems without closed orbit were given a complete classification with 72 kinds of possible topological structures.Based on the results,this paper prove that the 16 kinds of possible topological structures:α3β4-1,…,α3β4-4,α3β6-1,…,α3β6-12,can be realized and give the sufficient realization conditions.
Lienard systems;closed orbit;topological classification;Gauss sphere;Filippov transformation
O 175.12
110·44
A
1000-1832(2011)04-0001-12
2010-10-15
国家自然科学基金资助项目(10701020;11171056);吉林省科技发展计划项目(20101593);中国博士后科学基金资助项目
(20070420949).
李晓月(1975—),女,博士,副教授,主要从事动力系统及应用微分方程理论研究;王克(1947—),男,博士,教授,博士研究生导师,主要从事微分方程理论及应用研究.
陶 理)
猜你喜欢
力学学报(2022年12期)2023-01-15
数学杂志(2022年5期)2022-12-02
小学生学习指导(高年级)(2021年11期)2021-11-30
学校教育研究(2021年11期)2021-07-22
湖北工程学院学报(2021年3期)2021-06-16
中学生数理化(高中版.高二数学)(2021年12期)2021-04-26
宜宾学院学报(2020年12期)2021-01-30
数学物理学报(2019年6期)2020-01-13
中学数学杂志(2019年1期)2019-04-03
———《扇形的认识》教学廖
小学教学设计(数学)(2018年10期)2018-10-20