基于无源性的带液体晃动月球着陆器的姿态控制
2011-11-24 06:39杜辉
空间控制技术与应用 2011年1期
杜 辉
(1.北京控制工程研究所,北京100190;2.空间智能控制技术重点实验室,北京100190)
基于无源性的带液体晃动月球着陆器的姿态控制
杜 辉
1,2
(1.北京控制工程研究所,北京100190;2.空间智能控制技术重点实验室,北京100190)
针对带液体晃动的月球着陆器提出了一种基于无源性的姿态控制方法.分析了由拉格朗日力学建立数学模型的带液体晃动的月球着陆器系统的特性,并证明了该系统的无源性.无源性保证了系统的输入输出稳定性,提出的Lyapunov函数保证了系统的内部稳定性.根据系统的无源性和提出的Lyapunov函数推导出基于无源性的控制方法.仿真结果表明,该方法能很好地达到控制效果.
无源性;姿态控制;液体晃动;月球着陆器
近年来液体燃料占航天器总重量的比值相应加大,对航天器的姿态控制和稳定性产生重大影响.目前,抑制晃动干扰的控制方法主要有:自适应极点配置控制[1]、退步控制[2]、滑模控制[3]以及其他控制方法[4-5]等.
上述姿态控制方法都是假设液体晃动等效单摆的角度和角速度是可以测量得到的.但实际上液体晃动等效单摆的角度和角速度很难测量得到,即使在贮箱内增加敏感器,测量得到的结果误差也较大,因此有必要发展其他的控制方法.
针对加速度条件下带有液体晃动的月球着陆器,本文应用基于无源性的控制理论提出了一种基于无源性的姿态控制方法,在将月球着陆器控制到目标状态的同时抑制液体燃料的晃动,仿真实例验证了该方法的有效性.
1 带液体晃动的月球着陆器的数学模型
带液体晃动的月球着陆器的姿态控制对着陆器变轨对接以及姿态跟踪目标的达成非常重要.本文研究的是垂直下降阶段有加速度的条件下,在某固定平面内运动的带液体晃动的月球着陆器动力学与姿态控制.
垂直下降段作为制动段到着陆段之间的过渡,起着承上启下的作用,既要能适应制动段终端条件,又要满足着陆段初始时刻悬停的要求,其特点是接近垂直下降,历时短,速度低,需要将月球着陆器的速度减至目标速度,并将着陆器调整至垂直月面下降,为后续着陆作铺垫.带液体晃动的月球着陆器示意图如图1所示.
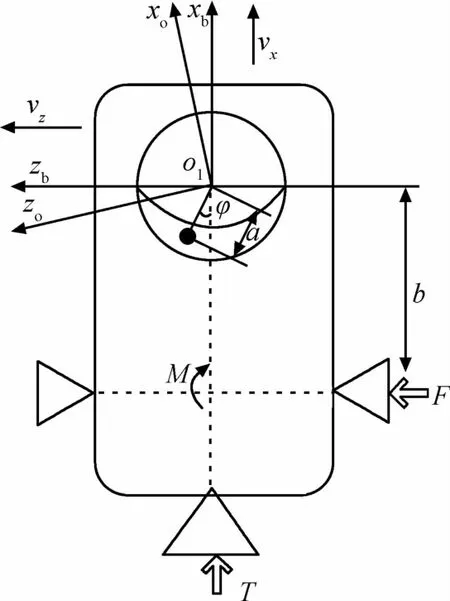
图1 带液体晃动的月球着陆器示意图
图1中,建立带液体晃动的月球着陆器轨道坐标系o1xoyozo和本体坐标系o1xbybzb.带液体晃动的月球着陆器可抽象成以下模型:月球着陆器质量为m,转动惯量为I;晃动液体的质量为mf,转动惯量为If,晃动等效单摆的摆长为a,摆臂悬挂点与着陆器质心之间的距离为 b;推力 T为沿本体坐标系xb轴的合力(发动机产生的推力与重力的合力),由于发动机产生的推力不是恒值推力,因此推力T为变值推力;液体不晃时,T的方向过月球着陆器质心;力矩 M为姿态控制输入;vx、vz分别为月球着陆器沿xb轴和zb轴的速度;θ为月球着陆器绕yo轴转过的角度;φ为液体晃动等效单摆相对月球着陆器zb轴偏转的角度;ε为晃动的能量耗散系数.用T和M分别表示推力矢量T和力矩矢量M的大小.
本文在姿态控制研究时,对执行机构不作考虑,认为所计算出的理论值即为着陆器敏感器测量所得到的实际值,不考虑敏感器测量的误差和测量过程中的噪声.
基于上述假设条件,由文献[2]可知利用拉格朗日力学建立的带液体晃动的月球着陆器动力学方程为

月球着陆器的姿态控制目标是:设计合理的T、F和M使得月球着陆器控制到目标状态的同时抑制液体燃料的晃动.
2 无源性的定义
耗散性系统理论在系统稳定性研究中起着重要作用.其本质含义是存在一个非负的能量函数(即存储函数),使得系统的能量损耗总小于能量的供给率.而无源性则是耗散性的一个重要特例,它将输入输出的乘积作为能量的供给率,体现了系统在有界输入条件下能量的衰减特性,即给系统输入一定的能量,系统会产生一定的输出能量,表征了系统的输入输出稳定[6].
基于状态空间的无源性的概念,对于非线性系统

其中,X是n维的状态变量向量,U为p维的系统输入向量,Y为 q维的系统输出向量,f(X,U),h(X,U)为关于(X,U)的函数.
定义 1[6].设函数 ω(X,Y):Rp×Rq→ R,称非线性系统(5)关于ω(X,Y)是耗散的,如果存在非负 C1存储函数 E(X):Rn→ R+,满足

对于任意的初始值X(0)=X0和时间t成立.此时称函数ω(X,Y)为供给率,非负函数E(X)为存储函数,式(6)称为耗散不等式.称状态空间描述式(5)关于ω(U,Y)是耗散的.
当p=q时,系统(5)为方形,选择一个很重要的供给率ω(U,Y)=UTY,则有

即得无源性定义.
3 月球着陆器系统动态与特性
分别定义Q、˙Q和¨Q如下:
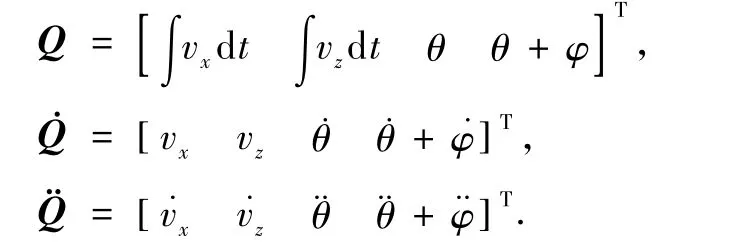
根据文献[7]的系统变换方法,将系统(1)~(4)改写成下列形式:

上式中各符号的表达式分别为

对由式(8)描述的带液体晃动的月球着陆器可证得:矩阵D(Q)是正定对称矩阵.进一步,可证明该系统为无源系统.
定理1.系统(8)为无源系统.
证明.取该系统的总能量函数为

对时间的导数为

可推导出

于是有

4 基于无源性的姿态控制器的设计
本文利用文献[8]的方法,针对带液体晃动的月球着陆器设计了基于无源性的姿态控制器.
方程组(1)~(4)定义了非线性系统的控制输入为(T,F,M),状态变量为.控制输入(T,F,M)=(0,0,0)时,系统相应的平衡点为不失为一般性,设=0,θeq=0,系统的平衡点为=[0,0,0,0,0,0].
下面利用无源性进行姿态控制器的设计.
取无源性能量存储函数为

对其求导可得:


取系统总的能量函数为

其中,k4>0,则对时间的导数为

令姿态控制律为

将式(18)代入到式(17)中,可求得

其中,k1>0,k2>0,k3>0,k4>0.
定理2.对于系统(1)~(4),采用式(18)所示的控制器,那么系统是稳定的.
证明.当系统(1)~(4)的控制器采用式(18)所示的控制律时,按式(16)取系统的能量函数,当k1>0,k2>0,k3>0,k4>0时,˙V(q,˙q)≤0,即˙V(q,˙q)为半负定,V(q,˙q)为非增函数.
可看出在控制律中没有不能测量得到的液体晃动的角度和角速度,并证明了闭环系统的稳定性.
5 仿真实例
在仿真中,参数取值如下:
m=600kg,I=720kg·m2,mf=100kg,
a=0.32m,b=0.25m,T=500N,
If=10kg·m2,ε=0.39kg·m2·s-1.
初始值为
θ0=2°,=0.57(°)/s,vx0=25m/s,
vz0=1.02m/s,φ0=10°,=0(°)/s
仿真曲线如图(2)~(5)所示.
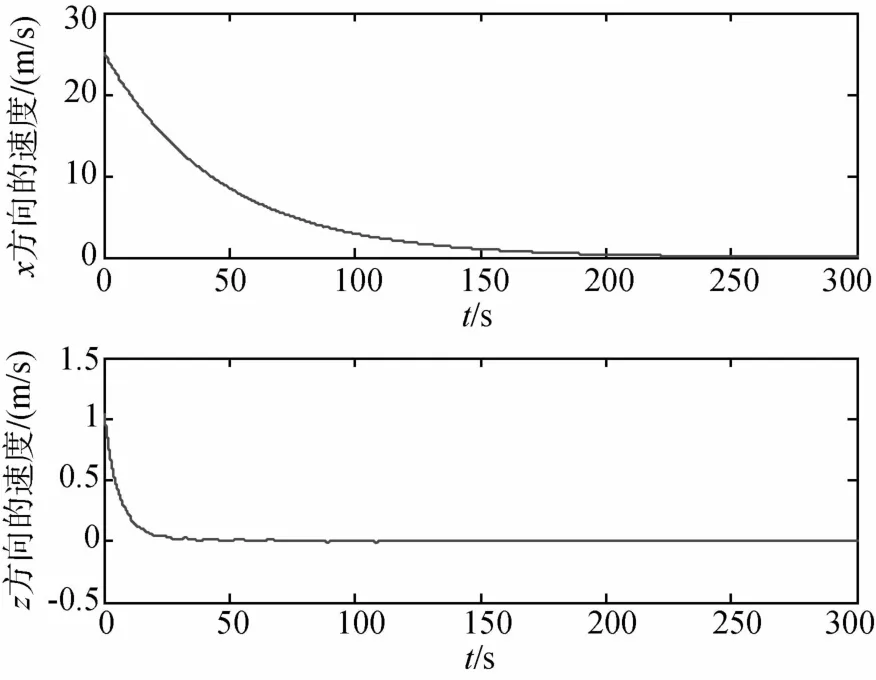
图2 vx,vz状态量的变化曲线

图3 θ,状态量的变化曲线
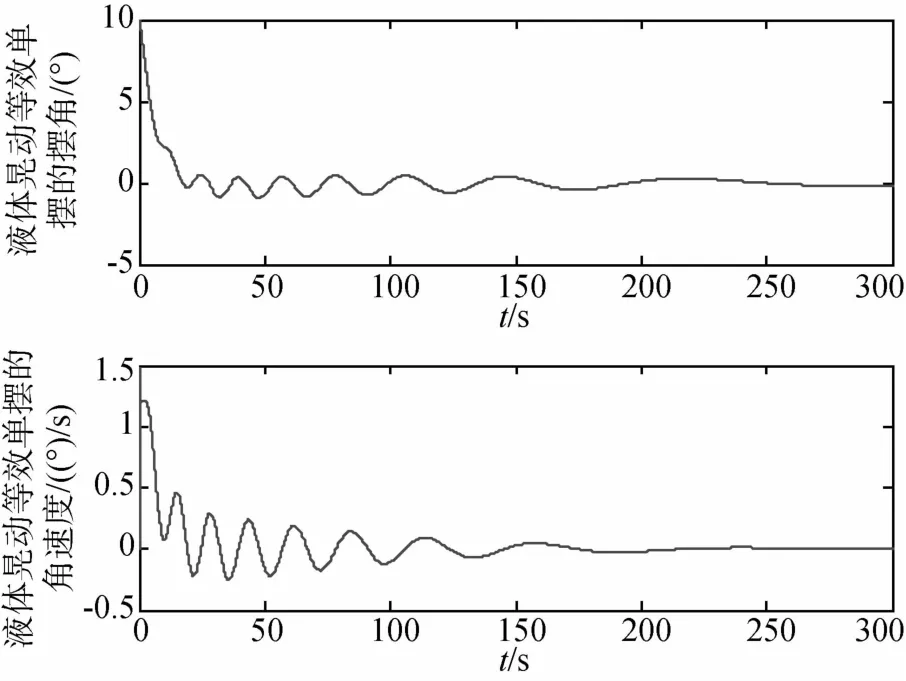
图4 φ状态量的变化曲线

图5 T,F,M控制量的变化曲线
从图(2)~(6)的仿真结果曲线可以看出,采用本文提出的控制器,系统能够到达平衡点,同时控制器输出很平滑,没有抖动.从图(5)中可以看出,液体晃动在十几秒后,晃动幅度已经很小,月球着陆器的姿态角和角速度以及zb轴方向的速度都能很快控制到系统的平衡点,达到了将月球着陆器姿态控制到平衡点同时抑制液体晃动的目的.仿真结果表明了该方法的有效性.
6 结 论
针对带液体晃动的月球着陆器,本文建立了系统的数学模型.针对液体晃动与月球着陆器姿态耦合及无源性等特点,设计了一种基于无源性的姿态控制器,按照这种方法设计的姿态控制器可以保证系统最终达到目标平衡点.文中给出的仿真实例说明了该方法的可行性与有效性.
[1]Shageer H,Tao G.Modeling and adaptive control of spacecraft with fuel slosh:overview and case studies[C].AIAA Guidance, Navigation, and Control Conference, Hiton Head, South Carolina, August 20-23,2007
[2]Reyhanoglu M, Cho S, McClam roch N H.Feedback control of a space vehicle with unactuated fuel slosh dynamics[C].AIAA Guidance, Navigation, and Control Conference and Exhibit, Denver, CO, August 14-17,2000
[3]Kurode S,Bandyopadhyay B,Gandhi P S.Slidingmode control for slosh-free motion of a container using partial feedback linearization[C].IEEE the 10thInternational Workshop on Variable Structure Systems, Antalya, Turkey, June 8-10, 2008
[4]Yano K,Terashima K.Robust liquid container transfer control for complete sloshing suppression [J].IEEETransaction on Control Systems Technology, 2002, 10(4):465-472
[5]Yano K,Terashima K.Sloshing suppression control of liquid transfer systems considering a 3-D transfer path[J].IEEE/ASME Transactions on Mechanics, 2005,10(1):8-16
[6]Byrnes C I,Isidori A,Willems JC.Passivity, feedback equivalence,and the global stabilization of minimum phase nonlinear systems[J].IEEE Transactions on Automatic Control, 1991, 36(11): 1228-1240
[7]Reyhanoglu M,Schaft A,McClamroch N H,et al.Dynam ics and control of a class of underactuated mechanical systems[J].IEEE Transactions on Automatic Control, 1999, 44(9): 1663-1671
[8]刘殿通,易建强,赵冬斌,等.一类欠驱动机械系统基于无源的控制[C].中科院自动化研究所自动化与信息技术发展战略研讨会暨2003年学术年会,北京,2003
Passivity Based Attitude Control for Lunar Lander w ith Fuel Sloshing
DU Hui1,2
(1.Beijing Institute of Control Engineering,Beijing 100190,China; 2.Science and Technology on Space Intelligent Control Laboratory, Beijing 100190,China)
A passivity based attitude control method is proposed for lunar lander with fuel sloshing.The properties of lunar lander with fuel sloshing system modeled by Lagrangemechanics are analyzed,and its passivity is proved.The passivity guarantees the input-output stability and the proposed Lyapunov function guarantees the inner system stability.The controlmethod is derived based on the passivity and the Lyapunov function.Simulation results are given to illustrate the validity.
passivity; attitude control; fuel sloshing;lunar lander
V448
A
1674-1579(2011)01-0050-05
10.3969/j.issn.1674-1579.2011.01.011
2010-09-15
杜 辉(1982—),女,山东人,助理工程师,研究方向为航天器姿态控制 (e-mail:qing-ying8268@163.com).
猜你喜欢
吉首大学学报(自然科学版)(2022年1期)2022-08-10
闽南师范大学学报(自然科学版)(2021年3期)2021-10-19
航天器工程(2019年4期)2019-11-11
伙伴(2019年12期)2019-01-17
北京航空航天大学学报(2017年4期)2017-11-23
北京航空航天大学学报(2016年9期)2016-11-16
北京航空航天大学学报(2016年3期)2016-02-27
北京航空航天大学学报(2016年3期)2016-02-27
IT时代周刊(2015年7期)2015-11-11
中学科技(2015年7期)2015-07-03