基于G2的卫星控制系统故障诊断的半物理仿真*
2011-11-24 06:39张芸香武云丽李智斌涂俊峰
空间控制技术与应用 2011年1期
张芸香,武云丽,李智斌,涂俊峰
(1.北京控制工程研究所,北京100190;2.空间智能控制技术重点实验室,北京100190)
基于G2的卫星控制系统故障诊断的半物理仿真*
张芸香1,2,武云丽1,2,李智斌1,2,涂俊峰1,2
(1.北京控制工程研究所,北京100190;2.空间智能控制技术重点实验室,北京100190)
研究一种基于G2的集故障注入、故障模拟和故障诊断为一体的半物理仿真系统,包括基于VxWorks的实时硬件模拟系统、星载姿轨控计算机、数管及遥控遥测模拟器和专用接口箱等.开发了基于G2的以某一类典型卫星控制系统为对象的故障诊断专家系统,并对G2外部接口进行了扩展设计.最后,以典型故障为例,在半物理仿真平台上进行了演示验证.
卫星控制系统;故障诊断;G2
卫星控制系统承担着在轨姿态控制、轨道控制等任务,是星上最重要和最复杂的分系统之一,也是最容易发生故障的分系统,一旦发生故障往往给整星带来严重影响.而卫星控制系统的故障诊断具有故障在闭环系统中传播与累积、地面诊断存在遥测时延及可利用信息少、自主诊断又受星载计算机资源限制等特点,因此仅仅依靠理论分析是不够的,应该采用理论研究与实验验证相结合的方式来探索有效的故障诊断方法与容错控制策略.
美国Gensym公司开发的面向对象的实时智能系统开发软件G2以其较强的并行实时计算、面向对象的设计、交互式图形技术、定性定量的集成化和结构化自然语言知识表达方式、动态定性定量混合建模与仿真运行功能,一直被认为是实时智能领域最优秀的软件开发平台之一.
本文将G2软件与基于VxWorks的实时通用仿真平台、星载姿轨控计算机实物系统组成一个集故障注入、故障模拟及故障诊断为一体的卫星控制系统半物理仿真系统.其中,实时通用仿真平台能够运行卫星的运动学动力学、敏感器和执行机构模型,通过专用接口箱与星载姿轨控计算机组成一个闭环控制回路,实现卫星控制系统的实时仿真;一台具有遥控遥测模拟功能的工控机能够实时将星载计算机中的可测信息下传,送到基于G2的卫星故障诊断系统,实现故障监测和诊断功能.此外,还以一个典型的卫星控制系统为例,介绍基于G2的卫星故障诊断专家系统建模过程,并进行了演示验证.
1 系统组成
如图1所示,基于G2的卫星控制系统故障诊断半物理仿真系统主要由基于VxWorks的实时通用仿真平台、卫星姿轨控计算机实物系统和基于G2的故障诊断系统组成.
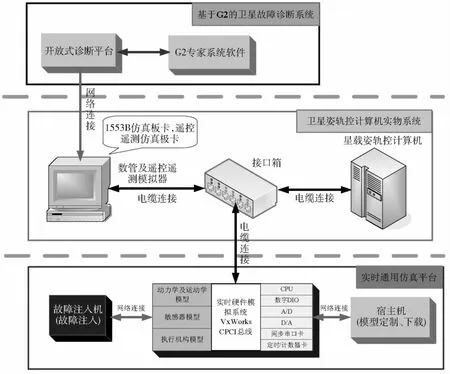
图1 系统构成
(1)实时通用仿真平台
实时通用仿真平台包括:实时硬件模拟系统、宿主机和故障注入机.
实时硬件模拟系统由高速运算的处理器和各种I/O接口组成,采用 CPCI总线结构,运行在 Vx-Works实时操作系统环境下,它能够模拟卫星动力学与运动学、敏感器、执行机构等部件.
宿主机是实时硬件模拟系统的管理机,其安装有Matlab/Simulink软件和应用软件开发框架.Matlab/Simulink用于实时接口建模和代码生成;应用软件开发框架在仿真实验过程中作为上层应用程序与实时硬件模拟系统之间通信的桥梁,引导用户完成从数学建模到实时仿真的全过程,具有实时代码下载、数据监视、仿真参数在线修改、仿真结果存储等功能.
故障注入机由一台装有故障注入软件的PC机和服务器组成,其中装载了卫星控制系统故障模型库,它能在仿真过程中向实时硬件模拟系统实时注入各种敏感器和执行机构故障.故障注入方式包括手动注入、程序预设注入和用户DLL方式注入.手动注入是指仿真过程中,用户通过键盘或鼠标手动修改所需注入故障的模型参数值来实现故障注入;程序预设方式是指在仿真开始前,通过人机交互的方式预先设置某些参数的变化方式,在仿真过程中,按照这种变化方式来改变相应变量的值以实现故障注入;用户DLL方式是指在故障注入软件里通过外挂用户函数的形式,根据环境变化或故障模拟程序反馈信息自动注入故障.
(2)星载姿轨控计算机实物系统
卫星姿轨控计算机实物系统包括:星载姿轨控计算机、数管与遥控遥测模拟器和专用接口箱.
星载姿轨控计算机完成姿态信息的采集、遥控数据指令的接收、数据处理和计算、输出控制信号驱动执行机构和输出遥测数据等功能.
数管与遥控遥测模拟器是两台配备了各种仿真板卡的工业控制计算机,用于模拟星上数管计算机及星地之间的遥控遥测功能,对星载计算机的遥测输出信息进行接收和显示,也是遥控信号输入的唯一通道.
专用接口箱的功能是实现星载计算机与实时硬件模拟系统、数管及遥控遥测模拟器之间信号匹配连接,并为星载计算机提供电源.
(3)基于G2的卫星故障诊断系统
基于G2的卫星故障诊断系统包括基于G2的故障诊断专家系统和开放式诊断平台.
基于G2的故障诊断专家系统(简称G2专家系统)是利用G2提供的知识库管理模式、知识表达方式、推理机制等功能建立的可对卫星控制系统故障进行诊断的专家系统.通过开发知识库管理模式实现卫星控制系统数据采集、诊断、界面显示等多个层次的管理;在知识库中装载了用类自然语言编写的卫星控制系统故障诊断的专家知识,借助G2提供的推理机制对来自遥控遥测模拟器的数据进行实时处理.
开放式诊断平台是G2专家系统的扩展平台,它具有两个主要功能:一是G2软件平台和外围数据源的数据交换接口,通过它可使G2专家系统实时接收遥测数据;二是运行其他多种故障诊断算法的平台,它能够运行用户以Matlab或C语言编写的诊断算法,支持有关技术人员进行故障诊断方法的开放性研究.
2 基于G2的卫星故障诊断系统开发
G2集成了专家系统技术、软件技术和网络技术,形成了功能强大的开发和运行平台.在G2上开发卫星实时故障诊断系统具有以下优点:1)方便为卫星本体及其部件建立相关类,能够实现实时数据的有效管理;2)能够使用自然语言编写程序、规则等;3)知识的入库、编辑等操作方便;4)规则、知识能够动态推理,并能动态给出决策行为;5)兼容性强,能够与数据库、C语言程序等外部系统实时交换数据.下面介绍基于G2的卫星控制系统故障诊断系统的开发过程,主要包括基于G2的故障诊断专家系统建立及开放式诊断平台的设计.
2.1 基于G2的卫星控制系统故障诊断专家系统的建立
以一个典型的卫星控制系统为对象,建立基于G2的故障诊断专家系统,该系统主要由五部分组成,即模型管理模块、状态输入参数库、部件库、规则与程序库和故障显示界面.
1)模型管理模块:是系统的管理界面,通过该模块可进入其他模块修改和查看相关内容.如图2所示,点击带倒三角的按钮,即可分别进入相应的显示界面.
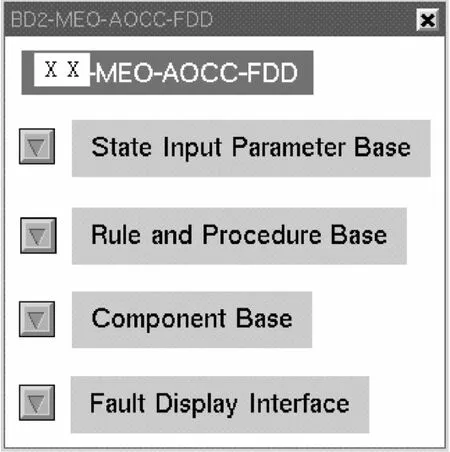
图2 模型管理模块显示界面
2)状态输入参数库:显示数据处理端传送来的各遥测数据,可以是原始变量数据、数据组合、特征提取、诊断分析和警告标志.如图3所示,来自数据处理端的数据包括:数字式太阳敏感器(DSS)的测量值、10N推力器的开关信号、陀螺测量的角速度、陀螺积分、三轴姿态角、控制计算机输出等.
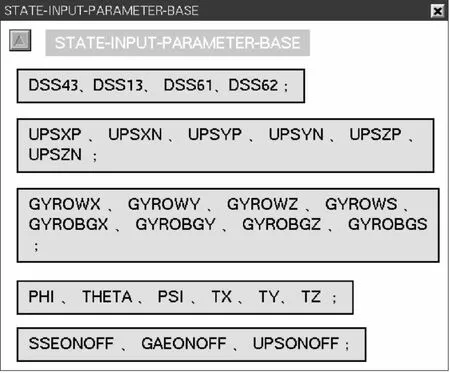
图3 定义接收变量库显示界面
3)部件库:存储管理与星上各部件相关的属性及变量.如图4所示,部件库中定义了4类:数字太阳敏感器 SSE、推力器 UPS、陀螺 GYRO及星本体SATELLITE.由于SSE、UPS和GYRO都有主份和备份之分,因此每一类下又分别派生了两个对象,如SSE-A表示主份数字太阳敏感器,SSE-B表示备份数字太阳敏感器.每个对象都具有相应的属性,如SSE-A对应的属性包括主份数字太阳敏感器DSS43,DSS13、DSS61、DSS62 的测量值及开关信号Sseonoff.
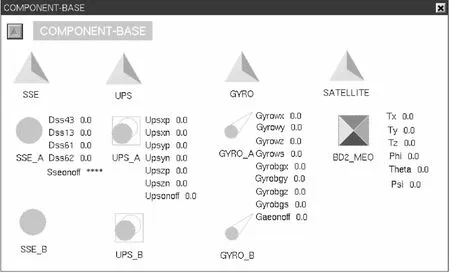
图4 部件库显示界面
4)规则与程序库:是诊断系统的核心模块,包括故障诊断规则及相关程序、管理故障运行程序、故障警告显示程序及规则.图5为规则库中部分故障诊断规则的显示界面.
5)故障显示界面:包括故障文本显示说明、颜色报警、曲线显示(将用户关心的变量用曲线显示出来),如图6所示.
2.2 开放式诊断平台设计
关于与外部数据的接口,一方面,G2专家系统可以直接通过Gateway/Bridges与外部网络进行数据通信;另一方面,可以通过开放式诊断平台实现与外部系统的数据传递,如图7所示.与前者相比,由于在软件底层对Gateway/Bridges进行了设计,开放式诊断平台更具有操作简单、可视化效果好的优点.该平台作为G2专家系统的扩展平台,采取了面向对象的模块化设计方案,并具有一系列数据预处理、保存、显示等标准模块库.G2专家系统与外部网络数据的传递通过其中的G2接口模块来实现:遥测数据以TCP协议发送到开放式诊断平台,在平台中进行相应设置(见图8)后,G2专家系统就能实时接收这些数据并进行诊断处理.
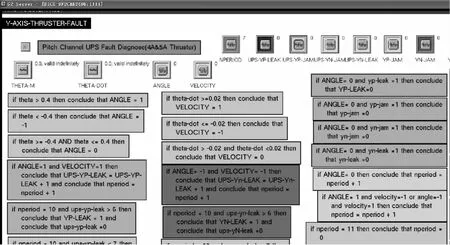
图5 规则程序库显示界面
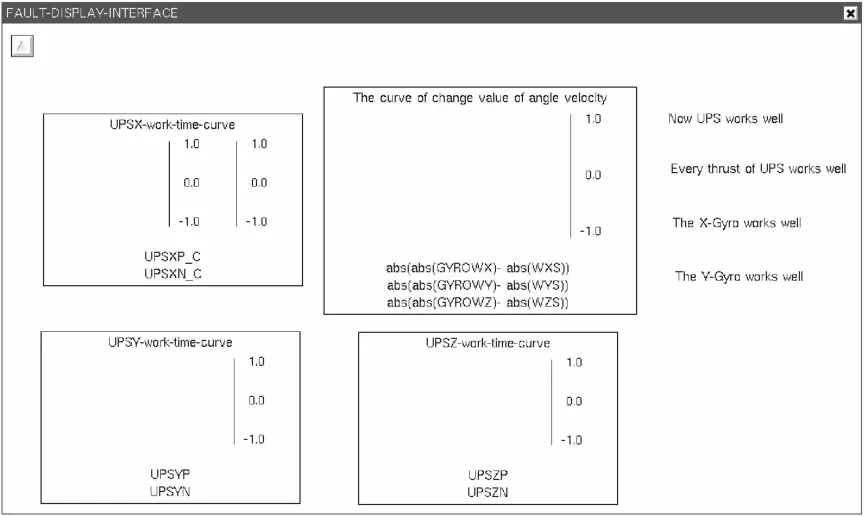
图6 显示模块
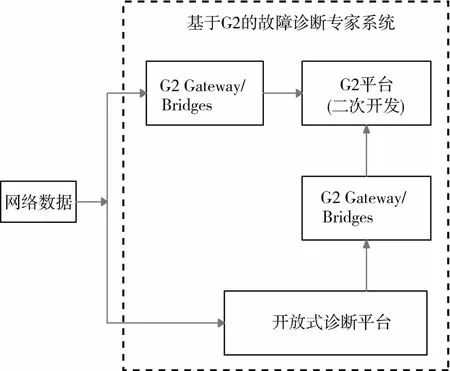
图7 G2与外部系统接口示意图
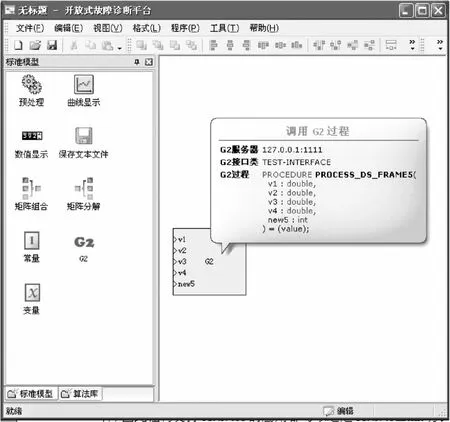
图8 开放式诊断平台显示界面
另外,作为故障诊断专家系统的有效补充,开放式诊断平台还能够运行用户以Matlab或C语言编写的其他形式的诊断算法,如神经网络诊断算法、基于小波的诊断算法等,大大提高了诊断系统的扩展性和开放性.
3 演示验证
以卫星太阳捕获模式下的巡航过程为例,利用图1所示的半物理仿真系统,针对陀螺故障(包括陀螺卡死、输出饱和及漂移增大等)、推力器故障(包括推力器的泄漏和堵塞)、太阳敏感器失效等故障进行诊断演示验证.
首先,将Matlab/Simukink下建立的星体动力学运动学模型、数字式太阳敏感器模型、3+1S陀螺模型、10N推力器模型及相应的硬件接口模块进行编译生成实时代码,通过应用软件开发框架下载到实时硬件模拟系统.然后,将部件故障模型导入故障注入机中,运行仿真平台进行仿真.
仿真开始时,敏感器和执行机构均正常,待控制系统达到稳定后,由故障注入机注入故障;数管与遥控遥测模拟器实时采集星载计算机的遥测信息,在开放式诊断平台内按照用户需求重组或整理这些数据,并实时传递给 G2 Server,由2.1节开发的卫星故障诊断专家系统进行故障诊断.
本例中故障注入机在680~780s期间注入滚动通道的推力器7A(X轴负向)泄漏故障,2000~2150s间注入X轴陀螺卡死故障(见图9).图10是注入7A推力器泄漏故障后,G2专家系统经诊断得到的诊断结果:“Some X-axis thruster of UPS do not work normally.The7 th thruster is leaking.”.图 11是注入X轴陀螺卡死故障后得到的诊断结果:“They X direction Gyro becomes wrong, it is stuffed!”.图12给出了遥控遥测模拟器下传的三轴姿态角和姿态角速度随时间(0~2000s)变化曲线,从图中可以看出,注入推力器故障后,卫星的滚动和俯仰方向的姿态角及角速度迅速发生变化,推力器恢复正常后,卫星姿态也逐渐恢复正常.
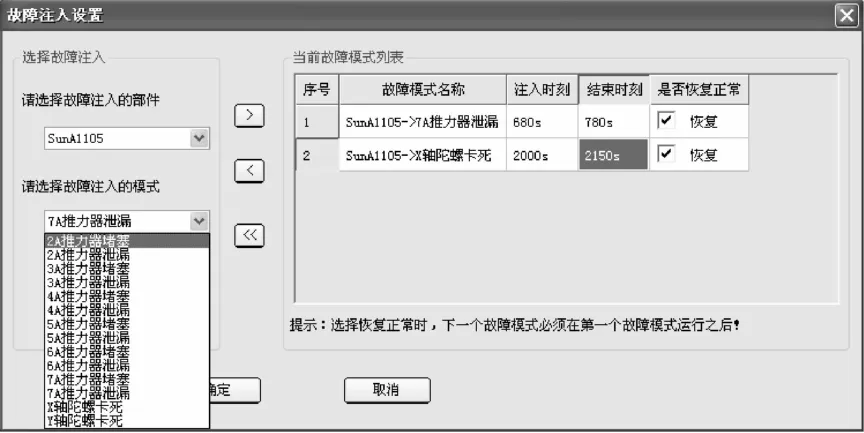
图9 故障注入界面
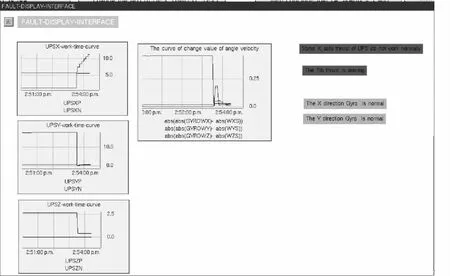
图107A推力器泄漏故障诊断结果显示
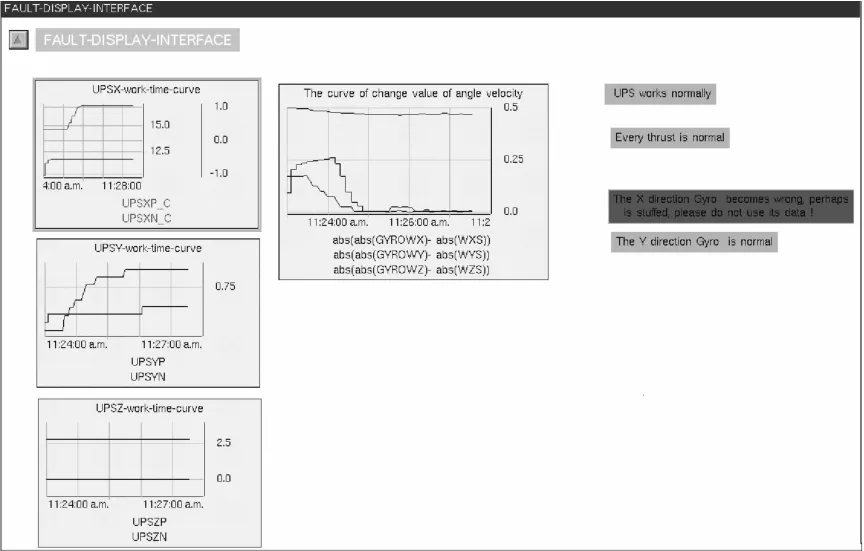
图11 X轴陀螺卡死故障诊断结果显示
由图10和图11的诊断结果可以看出,虽然有时陀螺故障和推力器故障对星体姿态影响的表现形式比较相似,但是基于G2的故障诊断专家系统能够准确的对推力器和陀螺的多种故障模式进行诊断.
通过给出的诊断演示实例表明,基于G2的卫星控制故障系统诊断半物理仿真系统具有较强实时性、可扩展性、可靠性,能够方便用户或研究人员使用.
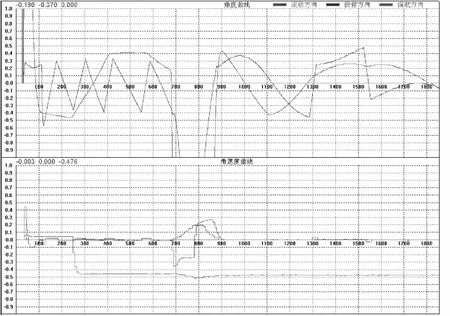
图12 姿态角与姿态角速度曲线
4 结 论
本文采用实时通用平台与星载实物相结合的半物理仿真方式,利用国际一流的专家系统开发工具G2,形成了集科学研究与工程应用于一体的通用、开放综合型故障处理仿真验证系统.通过对一个典型的卫星在太阳捕获阶段的全过程半物理仿真演示验证表明,该系统具有较强实时性、可扩展性及可靠性,且便于科研人员或用户利用该系统模拟星上真实运行情况,复现星上故障,实现快速故障定位;另外,该系统还能够验证新型故障诊断方法的有效性,为进一步开发适合于星上计算机使用的故障诊断方法奠定了基础.
[1]李智斌,郝永波,涂俊峰,王星.基于嵌入式仿真的卫星姿控系统故障模拟平台[J].山东大学学报(工学版),2005,35(3):88-92
[2]邹志云,冯文强.实时智能系统开发软件G2的应用现状与展望[J].现代化工,2004,24(Z2):166-174
[3]Gensym Corporation.Getting started with G2 tutorials[M].Version 5.0.Cambridge: Gensym Corporation,2005
[4]Gensym Corporation.G2 developer's guide[M].Version 5.0.Cambridge: Gensym Corporation,2005
[5]Gensym Corporation.G2 gateway[M].Version 5.0.Cambridge:Gensym Corporation, 2005
[6]Nan C,Khan F,Iqbal M T.Abnormal process condition prediction(fault diagnosis)using G2 expert system[C].Canadian Conference on Electrical and Computer Engineering, Vancouver, BC, 2007
G2 Based Hardware-in-Loop System for Fault Diagnosis of Satellite Control System
ZHANG Yunxiang1,2, WU Yunli1,2,LIZhibin ,TU Junfeng1,2
(1.Beijing Institute of Control Engineering, Beijing 100190, China;2.Science and Technology on Space Intelligent Control Laboratory, Beijing 100190, China)
A hardware-in-loop simulation platform based on G2 is introduced.This platform ismade up of real-time hardware simulation system based on VxWorks, onboard attitude and orbit control computer,onboard data handling simulator, command and telemetry simulator, and special interface testing system etc.The functions include fault injection,fault simulation and fault diagnosis.A fault diagnosis expert system of one kind of typical G2 based satellite attitude control fault diagnosis is designed.And at the same time, the G2 interface is developed.Lastly, taking a typical satellite attitude control system for example,a demonstration experiment is carried out on the simulation platform.
satellite control system; fault diagnosis;G2
TP391,V448.12
A
1674-1579(2011)01-0016-05
10.3969/j.issn.1674-1579.2011.01.004
*国家自然科学基金(60804016)资助项目.
2010-10-12
张芸香(1978—),女,广西人,工程师,研究方向为飞行器控制与仿真(e-mail:zhangyx502@yahoo.com.cn).
猜你喜欢
军民两用技术与产品(2022年4期)2022-06-28
科技与创新(2022年7期)2022-04-12
遥测遥控(2022年1期)2022-02-11
空间控制技术与应用(2021年1期)2021-04-25
军民两用技术与产品(2021年10期)2021-03-16
民用飞机设计与研究(2019年2期)2019-08-05
民用飞机设计与研究(2019年2期)2019-08-05
电子制作(2019年11期)2019-07-04
弹箭与制导学报(2018年2期)2018-12-21
计算机测量与控制(2018年2期)2018-03-08