基于GIS的飞行器定位中的匹配方法*
2011-11-24 06:39王丽娜高晓颖郭海涛张江水
空间控制技术与应用 2011年1期
王丽娜,高晓颖,郭海涛,张江水
(1.宇航智能控制技术国家级重点实验室,北京100854;2.北京航天自动控制研究所,北京 100854;3.信息工程大学测绘学院,郑州450052)
基于GIS的飞行器定位中的匹配方法*
王丽娜1,2,高晓颖1,2,郭海涛3,张江水3
(1.宇航智能控制技术国家级重点实验室,北京100854;2.北京航天自动控制研究所,北京 100854;3.信息工程大学测绘学院,郑州450052)
介绍了基于GIS的飞行器定位系统的基本原理,研究了一种数字影像与GIS矢量数据的匹配方法.该方法采用局部最优与整体匹配相结合的匹配策略,利用数字影像上提取的线特征作为匹配的共轭实体,以线特征的角度、线特征的长度、相交线特征之间的夹角等作为匹配的匹配实体,通过计算匹配实体间的相似性测度实现共轭实体间的精确匹配.
飞行器导航;地理信息系统;匹配方法;线特征
地理信息是有关地理实体的性质、特征和运动状态的表征及一切有用知识的信息,它具有区域性、多维结构特性和动态变化的特性.地理信息系统(GIS,geographic information system)是以地理空间数据库为基础,在计算机软硬件的支持下,对空间相关数据进行采集、管理、操作、模拟和显示,并采用地理模型分析方法,适时提供多种空间的和动态的地理信息,为地理研究和地理决策服务的计算机技术系统[1].
利用GIS能够实现快速、精确、综合地对复杂环境下的飞行器进行空间定位,且具有定位精度高、自主性强、可靠性高,不受飞行距离的影响等优点.将GIS与惯性导航系统(INS)结合,可以实现 INS和GIS间的互补,充分发挥它们各自的优点,有利于对飞行器进行高速度、高精度的自主定位.
GIS矢量数据与数字图像的精确匹配技术是基于GIS的飞行器定位系统中的关键技术之一,匹配的精度、速度和正确性直接影响着飞行器定位系统的精度、实时性和可靠性等性能指标,并决定着该定位系统的可用性.
1 基于G IS的飞行器定位系统
基于GIS的飞行器定位系统的基本结构如图1所示.其中导引系统的功能是利用匹配定位得到的精确的位置信息和惯性测量装置输出的状态信息,计算出飞行器的精确的状态参数,并按照预定的制导规律进行计算,形成导引指令,送往控制系统[2].
飞行器导引系统包括基于GIS的匹配定位子系统和导引指令形成子系统两部分.基于GIS的匹配定位子系统由飞行器遥感装置、GIS数据存储器和图像相关计算机组成.其中,图像相关计算机的主要功能是通过对飞行器遥感装置获取的实时图(数字影像)进行特征提取,并和预先存储的GIS数据进行相关处理等,获得飞行器当前的位置等状态信息.本文主要针对由图像相关计算机完成的GIS数据与数字影像的匹配进行研究.
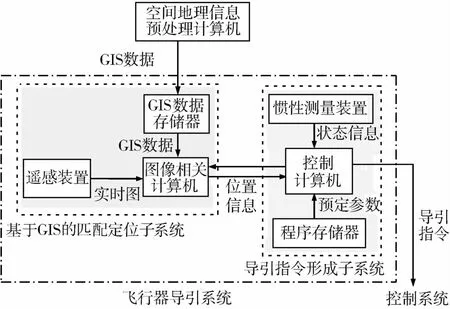
图1 基于GIS的飞行器定位系统结构示意图
2 GIS数据与数字影像的匹配
在本文的研究中,选择了数字影像中的各种线或面特征作为地理目标,所需的地理数据包括所选地理目标的几何特征信息、位置信息和相应的属性信息等.其中需要包括大量的地理目标的几何特征信息,如线段的长度、线段的方向、拐点的信息等[3].在地理信息的预处理阶段需要对地理信息进行合理的精化和压缩,并将所需的地理目标的几何特征信息等提取出来.
通过将GIS中的地理目标与数字影像进行匹配可以在二者之间建立一种数据对应关系,为后续的飞行器定位提供依据.其核心内容主要包括共轭实体、匹配实体、相似性测度的选取,搜索策略以及匹配策略的确定等.
2.1 局部最优与整体匹配结合的匹配方法
根据GIS数据和数字影像的特点、飞行器定位系统的需求等,GIS地理目标与数字影像的匹配采用了局部最优和整体匹配相结合的匹配策略.利用从数字影像上提取的线特征作为匹配的共轭实体,以线特征的角度、线特征的长度、相交线特征之间的夹角等作为匹配的匹配实体,通过计算匹配实体间的相似性测度实现共轭实体间的精确匹配.具体实现过程如下.
(1)以从数字影像中提取出的某个线特征上的一个拐角参量为准,遍历一条GIS数据坐标链上的每一个拐角信息,分别计算提取出的拐角与GIS数据坐标链上的每个拐角的相似性度量,该相似性度量是由拐角大小和组成拐角的两条线段中的一条线段的方向角构成的函数,记为

式中,θt为所选的从数字影像中提取出的拐角的大小,θg为对应的GIS数据中的拐角的大小,αt为组成提取出的拐角的两线段中的一条线段的方向角;αg为对应的GIS数据中组成拐角的两线段中的一条线段的方向角;p1、p2为相应的权值.为相似性度量设定一个阈值,记录相似性度量阈值范围内对应的GIS数据的拐角信息,该拐角是不唯一的,而所选的提取出的拐角信息是唯一的.这一步对GIS数据的拐角信息进行了筛选,获得了局部的最优解.
(2)分别以(1)中使用的提取出的线特征上的其它拐角为准,进行类似于式(1)中的计算.
(3)计算该提取出的线特征与对应的GIS数据坐标链的整体的相似性度量,相似性度量记为

设存在 m种情况,则可以分别计算出 ρ1,ρ2,…,ρm,取 f(j)=m in{ρ1,ρ2,…,ρm}.其中, dti为两个相邻角点之间的距离,dgi为对应的GIS数据中两个相邻角点之间的距离,dgi可能不唯一,αti是两个相邻角点之间连线的方向角,αgi是对应的GIS数据中两个相邻角点之间连线的方向角,p1、p2为相应的权值,φ根据GIS数据的精度确定.
(4)对其余的GIS数据坐标链进行上述(1)~(3)步的计算.
(5)求出 m in(f(j)),获得折线数据整体匹配的最优解,并记录对应的GIS数据中的地理目标的拐角信息,这时的拐角信息是唯一的.
(6)对从数字影像中提取出的其它线特征进行(1)~(5)步的处理.
通过上述计算,可以得到从数字影像中提取出的线特征与GIS数据中的地理目标的对应关系.
2.2 基于Hough变换的检测和匹配
在求解飞行器的位置信息时,需要利用至少三对不在同一条直线上的匹配点的信息.而为了能够精确的计算出位置信息,一般需要四对或四对以上的匹配点,并且在数字影像的四角附近应该都有匹配点.如果利用2.1中的匹配方法,得到的匹配点的个数和分布不能满足这一要求,或者匹配的精度不高,则需要进行进一步处理,以得到满足要求的GIS数据控制点及其对应的像点.
由于Hough变换[4-5]对噪声不敏感、抗干扰能力强,对断裂有免疫性,且检测结果为目标的描述参数,能够满足本文的需求,因此本文采用该变换进行后续的检测和匹配.这一方法要求所求得的GIS数据在数字影像上的像点坐标的精度较高,而由飞行器的惯性导航系统提供的位置、姿态等信息解得的像点坐标常常不能满足该精度要求,因此,在检测前,需要利用已经得到的GIS数据控制点及其对应像点的坐标解得一组匹配参数,对GIS数据对应的像点进行修正,以确保基于Hough变换的检测和匹配能够顺利进行.
利用Hough变换进行检测和匹配时,检测直线位置的可靠性、相似性测度定义的科学性以及搜索策略的合理性尤为关键,直接决定着检测和匹配结果的准确性、可靠性和匹配速度等.本文以修正后的GIS数据中折线段的影像空间长度和对应的参数空间θ为约束条件.在每个线段周围开设一个窗口,利用Hough变换检测直线,并分别对相邻窗口检测到的两条直线求交点,以获得一条折线,再计算该折线与GIS数据中折线的相似性测度.而后,按照设定的搜索步长和搜索范围,改变搜索位置,即每个窗口的位置,重复以上步骤,得到在每个搜索位置的相似性测度.相似性测度数值最小时对应的位置即为最佳的匹配位置,相应的检测出的直线和坐标即为最佳的匹配结果.如图2所示,具体计算过程如下.

图2 基于Hough变换检测和匹配的流程示意图
(1)根据通过匹配得到的GIS数据中的控制点及其对应的数字影像的像点坐标,对GIS数据中的地理目标在数字影像中的对应像点进行修正.
(2)将Hough变换中的参数平面 (ρ,θ)量化,设置二维累加数组 Q(ρi,θi),并将该数组初始化为零,其中 (ρ,θ)是 Hough参数空间的坐标参数,是对 θ量化值及对应的ρ值的计数.
(3)在与GIS数据中的折线对应的数字影像上的折线的每个线段周围,开设一个边长等于该线段长度的正方形的检测窗口,对该区域内的控制点,设置一个角度区间,即有权获得“投票”的角度范围,其中 θi′是 GIS数据中的折线对应的数字影像上的相应线段映射到参数空间的θ值,K为经验权值.按照参数方程 ρ=x cosθ+y sinθ,对该区间中的每个θ值计算相应的ρ值,并将相应的累加数组加1.
对二维累加数组设置一个大小为P×Li′的阈值,将“得票”数即累加数组中对应的值大于阈值的点作为备选点,其中Li′为GIS数据中的折线对应的数字影像上的线段的长度,P为经验权值,P∈(0,1).取备选点的极大值点为所需的峰值点,该点所对应的坐标即为检测直线的参数.若不能获得备选点,则说明该位置没有正确的检测结果,转至步骤(5).
根据各窗口检测直线的参数,计算相邻检测直线的交点坐标(x,y)、组成检测折线的各线段的长度Li和交点处两线段的夹角θi.
(4)计算上述检测窗口内的GIS数据中的折线数据和检测到的数字影像上折线数据的相似性测度,记为:

其中θi′为检测出的数字影像上的折线的各个拐点的夹角,θi为GIS数据中相应的夹角,L′i为检测出的折线的各个线段的长度,Li为GIS数据中相应的线段长度,p1、p2为经验权值.当F最小时,检测出的结果即为GIS数据中对应像点的精确位置.
(5)按照预先设定的每次窗口移动的长度,改变检测窗口的位置,进行步骤(3)、(4)中的计算,直至遍历完所有的搜索位置.
(6)选择相似性测度F最小时的位置作为最佳匹配位置,相应检测的直线段和坐标即为最佳匹配结果.
由此可以得到满足要求的GIS数据控制点及其对应的像点,为后续的飞行器位置的精确求解提供依据.
2.3 实 验
选取广东某丘陵地区的航空影像和该地区的部分GIS数据为实验数据,对上述方法进行验证,该地区的地形较为复杂,地物丰富.实验中,选用的数字影像的像元大小为0.06mm,主距为156mm,摄影高度约为1700m.所用的GIS数据是利用立体摄影测量的方法获取的,其平面中误差约为2m,高程中误差约为1m.
通过对该数字影像和GIS数据进行相关的处理及特征提取等,可以获取能够用于匹配的线特征,如图3所示.利用上述算法对数字影像与GIS数据进行匹配.实验结果证明,虽然GIS数据和数字影像的特征之间存在平移、旋转和尺度变化,但所设计的局部最优与整体匹配相结合的匹配策略能够实现二者的快速匹配,且在本次实验中达到了100%的正确率,匹配结果是令人满意的.然而,由于条件所限,本次实验尚不充分,参与匹配的GIS数据和线特征数量不多,后续将根据条件和需求进一步开展实验.

图3 线特征示意图
3 结 论
将GIS引入飞行器的控制系统中,利用GIS中蕴含的丰富的信息,为飞行器的实时定位提供了一条快速、可靠的途径,有利于研究出高性能的飞行器定位系统.实验证明,本文提出的利用局部最优和整体匹配相结合的匹配策略能够有效的应用于GIS地理目标与数字影像的匹配中,而利用基于hough变换的检测和匹配方式能够保证快速、精确的得到满足要求的GIS数据控制点及其对应的像点坐标,为精确求解飞行器的位置信息提供依据.在后续的研究中,可以对上述算法进行有针对性的改进和优化,以降低软件运行的时空开销,为将此方法应用于高速、高精度的飞行器创造条件.
[1]朱恩利,李健辉.地理信息系统基础及应用教程[M].北京:机械工业出版社,2004
[2]徐延万.弹道导弹运载火箭控制系统设计与分析[M].北京:宇航出版社,1999
[3]李传广,郭海涛,张江水,等.一种基于动态规划的遥感影像与GIS矢量数据匹配方法[J].测绘科学技术学报,2010,27(4):270-274
[4]张祖勋.数字摄影测量学[M].武汉:武汉大学出版社,1997
[5]谢凤英.Visual C++数字图像处理[M].北京:电子工业出版社,2008
A GIS-Based M atching M ethod for Vehicle Navigation
WANG Lina1,2,GAO Xiaoying1,2,GUO Haitao3,ZHANG Jiangshui3
(1.National Key Laboratory of Science and Technology on Aerospace Intelligent Control, Beijing 100854, China; 2.Beijing Aerospace Automatic Control Institute,Beijing 100854, China;3.Institute of Surveying and Mapping; Information Engineering University, Zhengzhou 450052,China)
The principle of vehicle navigation based on GIS is introduced.In this paper a matching method of image and GIS data is put forward.Thismethod adopts a matching strategy of local optimum and global matching combined.The line features extracted from the image are taken as conjugate entities,and angles and lengths of line features asmatching entities.The accurate matching of conjugate entities is realized by calculating sim ilarity measures ofmatching entities.
vehicle navigation; GIS; matching; line features
V4
A
1674-1579(2011)01-0033-03
10.3969/j.issn.1674-1579.2011.01.007
*国家自然科学基金(60874094)资助项目.
2010-06-10
王丽娜(1979—),女,山东人,工程师,研究方向为数字图像处理(e-mail:violina@126.com).
猜你喜欢
社会科学战线(2022年3期)2022-06-15
中学数学研究(广东)(2022年7期)2022-05-07
太原科技大学学报(2022年1期)2022-02-24
考试与评价·七年级版(2020年4期)2020-10-23
艺术大观(2019年17期)2019-10-09
青年文学家(2017年20期)2017-07-29
三联生活周刊(2017年26期)2017-06-29
美文(2017年4期)2017-02-23
小雪花·初中高分作文(2016年5期)2016-05-14
人间(2015年21期)2015-03-11