基于组态建模的航天器姿轨控数学仿真系统*
2011-11-24 06:39胡海霞涂俊峰曾海波李明群王大轶
空间控制技术与应用 2011年1期
胡海霞,涂俊峰,曾海波,李明群,王大轶
(1.北京控制工程研究所,北京100190;2.空间智能控制技术重点实验室,北京100190)
基于组态建模的航天器姿轨控数学仿真系统*
胡海霞1,2,涂俊峰1,2,曾海波1,2,李明群1,2,王大轶1,2
(1.北京控制工程研究所,北京100190;2.空间智能控制技术重点实验室,北京100190)
数学仿真是研究航天器姿态轨道控制系统常用的手段,目前常用人工编程的方式建模,花费时间长且软件的可读性、可维护性较差.提出一套基于组态建模的航天器姿态轨道控制仿真系统,该系统通用性强、可支持自动建模及代码生成.仿真实例表明,该系统模块化、自动化程度较高,大大提高了研究人员的工作效率.
航天器;组态建模;姿态轨道控制;仿真系统
航天器姿态轨道控制系统非常复杂,需要对航天器对象动力学、姿态测量部件、执行机构部件以及控制器算法等进行建模和仿真[1-3].传统上研究人员采用人工编程的建模方式,利用程序语言(如Fortran、Matlab、C/C++等)进行编程实现和仿真.这种方式对研究人员的个人能力依赖性较高,往往需要花费大量的人力、物力和较长的时间才能完成一个系统的建模工作,并且软件的可读性、可维护性都较差.随着航天技术的迅速发展,航天器的性能要求逐步提高、结构与构型日益复杂化、研制周期也大为缩短,原有人工建模的方式已经不能满足需要.军用仿真技术发展趋势是网络化、提高模型表达的权威性、标准化、人机界面的多媒体化等.国内外航天部门的经验表明,为了得到符合工程实际的仿真结果必须努力建立自己的仿真环境[4-5].
正是在这种背景下,本文提出开发一套功能齐全、通用性强的航天器姿态轨道控制设计仿真系统,该集成环境采用标准化的仿真模型、支持组态建模、仿真分析和演示验证等整个仿真生命周期.此仿真系统的建立将为航天器姿态轨道控制系统方案设计和仿真提供良好的技术支持.
1 功能设计
航天器姿态轨道控制设计仿真系统的目标是建立起基于可靠模型、网络环境、软件资源共享的开发环境,主要由仿真模型库、可视化组态建模仿真平台和演示验证软件等三部分组成.
航天器姿态轨道控制系统由动力学、敏感器、控制器和执行机构四部分组成,因此也决定了仿真系统可以分为动力学模型(含姿态动力学模型、轨道动力学模型、外干扰力和力矩模型)、敏感器模型、控制器模型(星上算法)和执行机构模型等,控制系统的闭环反馈结构如图1所示.
1.1 仿真模型库的建立和管理
航天器仿真的核心是仿真对象的数学模型,包括姿态动力学模型、轨道动力学模型、敏感器模型、执行机构模型、控制器模型、空间环境模型、常用基础算法模型等.所有应用于航天器控制系统仿真的模型都必须是经过充分验证的、可靠的模型,这些仿真模型是完成一个具体算法或者操作的是不可再分的执行单元.

图1 航天器姿态轨道控制系统结构
在姿态轨道控制仿真系统中,仿真模型表现为C/C++语言编写的具体的可执行文件或者动态链接库文件及其相关信息与文档的集合,仿真模型库则指的是上述仿真模型的集合.
仿真模型库需要实现对模型的多种管理功能,因此需要建立模型库管理系统,以便实现模型的规范化管理和使用、订立统一的模型使用标准.
模型库管理首先实现模型规范化入库功能.根据实际规范对入库模型的内容进行统一标准要求,规范模型的输入输出接口.除了模型的入库功能外,还应具备模型的修改、删除、使用、查询和检索等功能,为不同目的系统仿真提供服务.在模型库的浏览上,可采用类似W indows浏览器的方式,方便设计人员选取和使用.
1.2 可视化组态建模仿真平台
有了接口统一、规范的仿真模型库,航天器姿态轨道控制系统仿真中必备的各项单元要素就具备了.但为了方便快捷地提取模型、搭建航天器专用的仿真程序,还有必要建立一个组态建模仿真平台.具体而言,该平台可实现以下功能:
(1)支持组态建模技术.设计人员可以根据航天器的特性和部件配置情况,从仿真模型库中选取所需的动力学模型、敏感器模型、执行机构模型的图标,通过可视化的操作将模型图标拖至建模平台上.
(2)可视化组态建模平台可以实现对所选取部件的安装和性能指标进行界面操作设置的功能.建模过程操作简便,设计参数易于调整.
(3)除了部件的搭建和参数配置外,建模平台还可以由客户端设计人员自由选择仿真运行时需要实时显示的数据和曲线.
(4)建模完成后,可利用代码生成技术自动生成代码实现对应的仿真功能模块,并按照图1所示的航天器姿态轨道控制系统结构自动搭建仿真程序框架,并预留出控制器(星上算法)接口,供设计人员增加星上程序代码、调试和仿真使用.
1.3 演示验证软件
为了直观演示数学仿真的结果,还需要演示验证软件.该软件可以在数学仿真数据的驱动下,正确直观地以三维动画的形式显示航天器入轨后的姿态轨道运动情况和航天器上光学敏感器的视场范围、太阳翼等可运动部件的运动情况、有效载荷的作用范围等.
2 系统方案设计
从系统实现角度看,航天器姿态轨道控制设计仿真系统的目标是实现一个在多用户并行操作使用环境下对数据进行存储、传输、处理和显示的软件平台.
本系统采用客户端服务器结构,客户端与服务器之间采用网络进行通信.服务器作为数据库服务器,负责数据存储,存放各种航天器模型以及各个用户的用户信息.客户端指系统建模仿真人员所使用的计算机,作为用户搭建系统模型的平台,提供用户使用人机交互界面,并完成整个数学仿真与演示过程.另外系统中存在多台客户端,可满足多个建模仿真人员同时进行系统建模与仿真工作.
整个系统由4大部分软件组成,即数据库软件、数据库与客户端连接(即 CS中间件,以下均称为CS中间件)、可视化组态建模仿真平台、演示验证软件.本系统的数据流向示意见图2,其中数据库软件及CS中间件运行在数据库服务器,完成数据服务与系统管理等功能.可视化组态建模仿真平台、自动生成的仿真程序以及演示验证软件运行在客户端计算机中,完成系统建模、仿真与演示等功能.
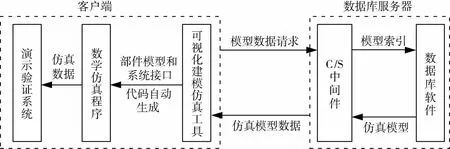
图2 系统数据流向图
2.1 数据库软件
数据库软件作为系统资源的提供者,存放各类仿真模型信息、用户信息(包括登陆信息和权限信息)、仿真流程信息和仿真运行数据等.整个系统的所有数据原则上都是存储在数据库中,系统在运行过程中根据需要和权限从数据库中读入需要的数据,根据系统定义的逻辑设计仿真的数据结构,通过人机交互界面展现给用户.
用户对数据进行操作后,数据将最终存放回数据库.对于系统中长期不变的、变动量小的、以及变动时效性要求低且总量比较大的,同时不涉及到用户权限管理的部分数据,可以根据实际情况确定选择存储在数据库中、或者直接存储在客户端以避免不必要的网络负荷.
2.2 CS中间件
CS中间件的作用是增强数据库中存放的模型以及用户信息的安全性,增强系统的可扩展性.增加了CS中间件,用来接收客户端请求,并由其对数据库进行操作,将结果返回客户端.
由于CS中间件运行在数据库服务器上,其对数据库的操作均为本地操作,是系统中唯一能够获取数据库安全信息的节点,且客户端访问数据库均由CS中间件进行合法性判断,因此该方法大大提高了系统的安全性.
2.3 可视化组态建模仿真平台
可视化组态建模仿真平台是整个系统的核心部分,主要用来完成可视化的系统建模,并自动生成仿真程序.
2.3.1 组态建模模块
系统的组态建模模块使用Windows标准的列表控件作为用户搭建仿真程序的主视图.提供连接数据库服务器上仿真模型库的接口,通过与模型库的连接,客户端可以完成模型库的浏览,使用标准鼠标拖放操作,将模型从模型库窗口拖放到主视图中.效果如图3和图4所示.
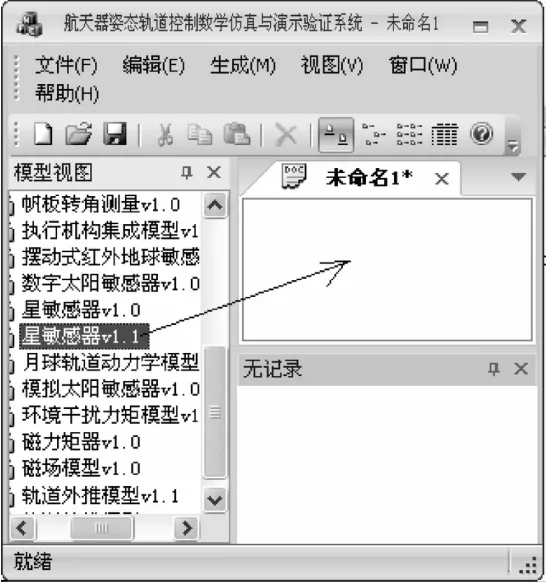
图3 组态建模——模型拖放示意图
组态建模模块可以获取被拖放模型的服务器路径,将模型的描述文件下载到本地临时目录,然后解析描述文件,创建一个列表的item表示模型的一个新实例.
在XP或更高版本的 W indows系统中,标准列表控件支持新的Group风格,支持将模型自动分为四类,即动力学、敏感器、执行器、通用与共享组件,分别对应模型的类别.比如图4中,拖放的两个星敏感器模型被自动分类到敏感器类下面.
由此可见,客户端的设计人员可以根据航天器的特性和实际的部件配置情况,从仿真模型库中选取所需的动力学模型、敏感器模型、执行机构模型,一一拖至建模平台的主视图上,可以直观地看到所配置的航天器具备哪些星上部件.
2.3.2 模型配置模块
在完成航天器的部件组态建模之后,需要完成轨道参数的设置、所选各敏感器的安装和性能指标的配置等.航天器的轨道动力学、姿态动力学特性不同,敏感器安装不同,这些均可通过界面进行设置.以数字太阳敏感器为例,图5给出了模型配置示意图.
每个模型都有自身独特的可配置参数,例如对于星敏感器模型,配置参数包括安装矩阵、噪声特性、视场范围等,而对于推力器模型,则需配置推力方向、推力大小等.
除了上述参数外,模型配置模块还可针对不同模型的解算周期进行设定.
2.3.3 仿真变量及曲线实时显示模块
为了实时监控仿真运行情况,仿真平台提供仿真数据显示功能.仿真人员可以根据航天器的特点,选择任意感兴趣的状态变量,通过数据显示和图形曲线绘制进行实时显示.图6给出了监视变量选择示意图,设计人员可以从所有的系统变量中选择需要监视的变量,同样可以选择需要实时曲线显示的变量.
2.3.4 代码自动生成模块
代码自动生成模块的功能是将数学建模仿真工具目录下的仿真程序模板复制到用户指定的任务文件存放目录下,根据生成的任务文件中的描述,将图形化建模的系统模型转换为VC代码,生成仿真程序.
生成的VC++仿真程序中预留有控制器(星上算法)的接口,客户端设计人员可以在此程序上加入星上算法,并可以进行跟踪调试.
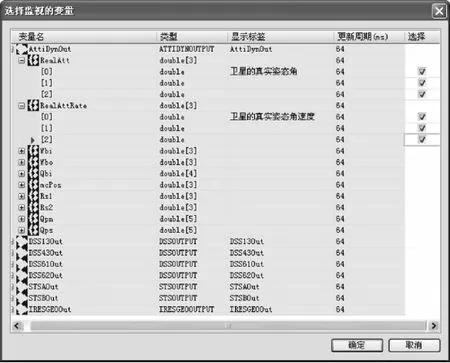
图6 组态建模——需要进行监视的仿真变量选择
2.4 演示验证软件
演示验证软件在仿真数据的驱动下,对航天器的姿态和轨道控制过程进行可视化演示验证.
该软件通过加载航天器在轨飞行过程中的空间和地球背景的场景模型,可实现空间以及空间对象物的渲染;通过网络通信协议实时接收航天器数学仿真软件发送过来的姿态数据和轨道数据,能够动态演示航天器的轨道、姿态、敏感器/天线视场、天线、帆板等信息.
该软件采用模块化结构,按照功能划分为如下模块:用户界面模块、二维电子地图模块、曲线图模块、三维驱动引擎模块、驱动数据处理模块、地景数据处理模块、飞行器模型数据处理模块、网络通信模块、动画控制模块,结构图如图7所示.
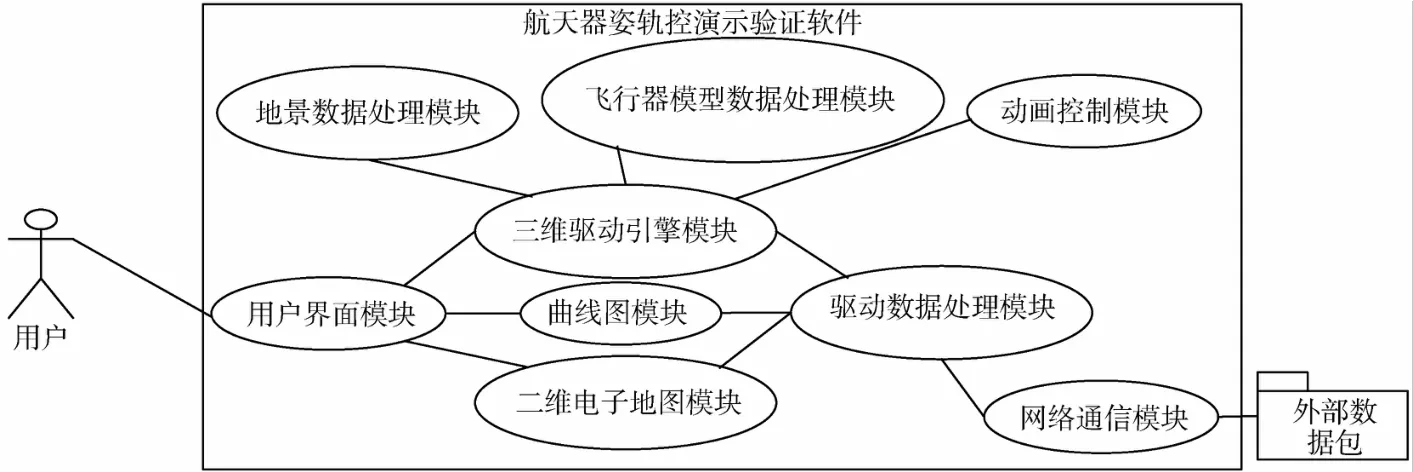
图7 航天器姿轨控演示验证软件结构图
3 仿真系统应用实例
为了验证上述总体设计思想是否可行,基于上述设计思想开发了航天器姿态轨道控制设计仿真系统.这里以某典型卫星的仿真为实例,给出基于该卫星的姿轨控数学仿真系统的配置、仿真和演示验证过程.
利用可视化组态建模仿真平台,对该卫星的系统进行建模,建模结果如图8所示.
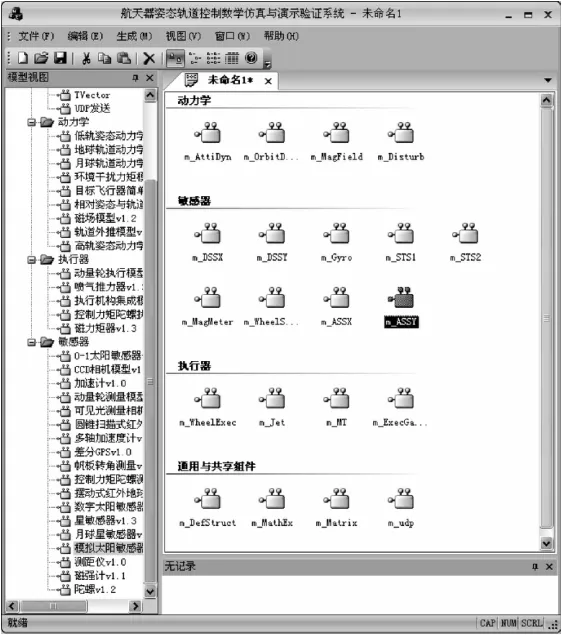
图8 某卫星系统建模视图
对每个模型进行配置、选择需要监视和实时曲线显示的变量后,即可自动生成VC++程序,设计人员增加控制器(星上算法)代码后,最可进行仿真运算.最终仿真软件及演示软件的运行情况如图9~图11所示.图9是仿真软件的运行情况,左侧实时显示了需要显示的数据,右侧以图形曲线的形式显示了仿真过程中航天器的姿态变化;图10和图11则以动画形式实时显示航天器在轨飞行的姿态,并显示了轨道坐标系、本体坐标系等.演示系统可以根据仿真条件的不同,实时直观地显示多种仿真效果.
由上述应用实例可以看出,该系统在模型建立、连接搭建仿真系统、运行仿真程序并分析结果、实时动画演示仿真过程等各个环节,均以可视化技术实现,操作简单,应用方便.

图9 仿真软件运行情况

图10 演示验证软件运行情况——正常运行

图11 演示验证软件运行情况——推力器调姿
4 结 论
未来的航天器工程将朝着复杂挠性多体、数量大、研制周期短的方向发展,本文通过对航天器姿态轨道控制设计和仿真需求的分析,给出了包括规范化的仿真模型库的建立和管理、可视化组态建模仿真平台和可视化演示验证等多种功能为一体的航天器姿轨控制数学仿真系统.该系统可以在保证质量的前提下,大大提高设计和仿真人员的工作效率.
基于组态建模的航天器姿轨控数学仿真系统对航天器的姿态轨道控制的数学仿真和验证有着十分重要的意义.
[1]刘良栋.航天器控制系统仿真技术[M].北京:宇航出版社,2003
[2]张新邦,林来兴,索旭华.航天器控制系统仿真技术[J].计算机仿真,2000,17(2):57-59
[3]屠善澄.航天器姿态动力学与控制[M].北京:宇航出版社,2001
[4]涂俊峰,李智斌,邢琰.航天器姿态控制故障诊断与系统重构仿真框架[J].控制工程,2003,10(增刊):40-42
[5]张银,索旭华,郭明姝.基于混合编程技术的 AOCC应用软件快速仿真平台[J].空间控制技术与应用,2010,36(1):56-62
A Con figuration M odeling-Based M athem atic Sim u lation System for Spacecraft A ttitude and O rbit Control
HU Haixia1,2,TU Junfeng1,2,ZENG Haibo1,2,LIMingqun1,2,WANG Dayi1,2
(1.Beijing Institute of Control Engineering, Beijing 100190,China;2.Science and Technology on Space Intelligent Control Laboratory,Beijing 100190,China)
Mathematic simulation is a usefulmethod in the design of spacecraft attitude and orbit control system.Traditionally, researchers establish mathematical model by manual work, which is time-consum ing and of low readability and maintainability.A kind of spacecraft attitude and orbit control simulation system based on configuration modeling is proposed in this paper.This system has a high expansibility and usability,and supports automatic modeling and coding.Simulation indicates that the system achieves a high degree ofmodularization and automatization,and helps researchers to improve efficiency greatly.
spacecraft; configuration modeling; attitude and orbit control;simulation system

V44
A
1674-1579(2011)01-0011-05
10.3969/j.issn.1674-1579.2011.01.003
*预先研究仿真课题(513040301)资助项目.
2010-09-16
胡海霞(1977—),女,河南人,高级工程师,研究方向为航天器控制与仿真技术 (e-mail:jwhhx502@sina.com).
猜你喜欢
国际太空(2022年7期)2022-08-16
科学与财富(2022年6期)2022-07-04
中原商报·科教研究(2021年4期)2021-03-03
河北农机(2020年10期)2020-12-14
国际太空(2019年9期)2019-10-23
物理学报(2019年6期)2019-04-10
国际太空(2018年12期)2019-01-28
国际太空(2018年9期)2018-10-18
电脑知识与技术(2018年8期)2018-05-07
中国科技纵横(2017年1期)2017-03-10