我国优秀F11级三级跳远运动员李端助跑最后一步的运动学分析
2011-10-24 03:49:06代宝奇宫方洪张勤博
运动 2011年3期
赵 凯,代宝奇,宫方洪,张勤博
(1.山东省昌乐二中体育组,山东 潍坊 262400;2.营口大学体育部,辽宁 营口 115000)
我国优秀F11级三级跳远运动员李端助跑最后一步的运动学分析
赵 凯1,代宝奇2,宫方洪1,张勤博1
(1.山东省昌乐二中体育组,山东 潍坊 262400;2.营口大学体育部,辽宁 营口 115000)
通过对李端助跑最后一步的运动学分析,获得李端助跑最后一步的运动学参数,并与国内外优秀运动员的数据进行比较,寻找异同并对其合理性进行探讨,为训练提供参考意见。
F11;三级跳远 ;助跑;最后一步;运动学
1 研究对象与方法
1.1 研究对象
本文选定李端2007年参加的第七届全国残疾人运动会男子F11级三级跳远比赛的两次试跳的技术录像为研究对象。
1.2 研究方法
1.2.1 文献资料法 查阅收集了大量国内外有关三级跳远技术运动学分析和残疾人运动的有关资料。
1.2.2 录像解析法
(1)录像拍摄。采用两台SONY摄像机在比赛现场同步进行单点扫描拍摄,录像拍摄布置如图1。摄像机位于助跑道方向左侧距离运动平面得距离15.37m,两台摄像机之间的距离8.90m,摄像机主光轴垂直于助跑道。机高1.30m,以50帧/秒的频率对李端三级跳远比赛全程进行不停机的拍摄。其中,A机拍摄了助跑最后5米到跨步跳腾空阶段的录像;B机拍摄了跨步跳腾空到落地阶段的录像,两台机器完整记录了李端的两次试跳情况,并在拍摄前后拍摄了置于运动平面的比例尺。其现场拍摄结果见表1。
(2)解析过程。运用美国艾里尔解析系统对以上选取对象的拍摄图像进行解析。在解析过程中,确定X轴为运动员的跑进方向,Y轴为垂直地面方向。采用美国Dempster人体模型,通过该模型获得有关运动学参数,并采用数据平滑法对原始数据进行平滑处理。
1.2.3 数理统计法 用Excel获得各项指标的平均数。
1.2.4 对比分析法 把经过统计处理的运动学参数和优秀三级跳远运动员进行比较,结合专项理论分析其存在的原因和不足,并且提出相应的建议和参考。
2 结果与分析
2.1助跑最后一步上板速度参数的运动学分析
在众多因素中助跑速度无疑是决定三级跳远成绩的最主要因素,有了较好的助跑速度就为创造好成绩提供了可能性,运动员还应该将助跑与起跳完美结合起来,以便获得较大的腾起初速度和适宜的腾起角。助跑最后一步是助跑与起跳衔接的关键,盲人运动员助跑是在引导员帮助下完成的,想要获得快速的助跑并且与起跳很好的结合困难可想而知,这也是制约盲人运动员成绩的重要因素之一。

图1 F11级三级跳远比赛现场拍摄示意图

表1 F11级三级跳远李端助跑最后一步速度参数(m/s)
有研究表明,助跑中损失0.1m/s的速度,成绩就会损失30到35厘米。从表1我们可以看到,李端助跑速度的最大值8.842 m/s,这与高水平运动员相比差距很大,当然不能脱离运动员本身的条件而只看数据,李端这样的运动员取得残奥会冠军就说明在F11这个级别中他的速度已经很高。但是从李端的各项身体素质来看李端的助跑速度还有提高的空间。助跑距离短的情况下应该提高李端利用速度的能力尽量减少水平速度的损失。
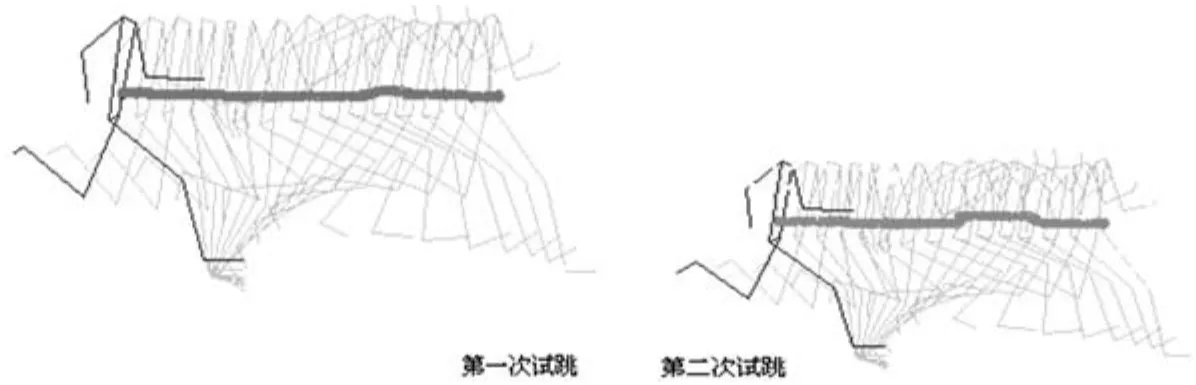
图2 李端两次试跳助跑最后一步棍图叠加图

图3 李端两次试跳摆动腿蹬离地面瞬间分腿角的棍图
2.2 助跑最后一步李端身体重心高度变化的运动学分析
助跑最后一步身体重心高度的变化,能反应运动员有无提前准备做起跳动作的意识,从表2可以看出,李端从摆动腿蹬离地面瞬间到起跳腿着地瞬间身体重心变化不大,身体重心上下起伏不大助跑水平速度就不会损失太大。大部分运动员水平速度在起跳前的损失都是由于重心变化造成的。
图2更加直观的反映出李端在助跑最后一步身体重心变化情况,棍图叠加图说明李端在助跑与起跳的衔接阶段重心几乎没有起伏,表明李端助跑最后一步重心平稳,也许这与李端是全盲运动员有直接关系,因为李端的助跑他看不见起跳区依靠固定的助跑步数来完成起跳。李端这一技术特点在以后的训练当中应加以利用,对成绩的提高会有帮助。

表3 F11级三级跳远李端助跑最后一步摆动腿离地瞬间分腿角(°)
2.3助跑最后一步摆动腿离地瞬间分腿角的运动学分析
分腿角指两大腿之间的夹角有时称两大腿的分开角或两大腿的并拢角。分腿角的大小能表明运动员下肢的动作幅度。运动员经过前段的助跑到最后一步理论上这时的水平速度应该最大,但是很难要求全盲运动员全速准备起跳。在最后一步摆动腿离地瞬间摆动腿与起跳腿之间的分腿角大小反映摆动腿的摆动效果和幅度。从图3、表3可以看出,研究对象李端在摆动腿离地瞬间分腿角最大值仅为89.95°,说明李端的摆动腿的摆动幅度较小,这样给单足跳阶段良好的起跳增加了难度。
这种现象的原因是因为李端视力残疾,造成其助跑没有做到技术要求的步幅开阔富有弹性。而自身的本体感觉不好对身体空间位置的判断力较差。虽然经过长时间的练习李端的助跑已经改善很多但是助跑放不开,不敢全力发挥自己的助跑速度,以及髋关节的灵活性和协调性较差已成为制约李端成绩提高的重要因素。
3 结 论
3.1 李端的各项身体素质说明李端的助跑速度还有提高的空间,助跑距离短的情况下应该提高李端利用速度的能力尽量减少水平速度的损失。
3.2 李端的助跑与起跳衔接阶段重心几乎没有起伏,表明李端助跑最后一步重心平稳,这与李端是全盲运动员有直接关系,李端的助跑依靠固定的助跑步数来完成起跳。
3.3 李端在摆动腿离地瞬间分腿角最大值仅为89.95°,李端的摆动腿的摆动幅度较小,这样给单足跳阶段良好的起跳增加了难度。
[ 1 ] 北京残奥会知识读本[ M ].北京:华夏出版社,2006.
[ 2 ] 和平,王健,孟凡林.三级跳远训练理论与实践研究[ M ].天津:大津科学技术出版社,1999.
[ 3 ] 郭卫,贾勇,谭涌.残疾人体育[ M ].北京:北京体育大学出版社,2007.
[ 4 ] 肖丽琴,谢丽娜,张永鹃.残疾人体育[ M ].北京:人民体育出版社,2008.
[ 5 ] 王瑞元.运动生理学[ M ].北京:人民体育出版社,2002.
G823.4
A
1674-151X(2011)03-012-02
10.3969/j.issn.1674-151x.2011.03.005
投稿日期:2010-12-02
赵凯(1985 ~),硕士。研究方向:体育教育训练学。
猜你喜欢
中学生数理化·高一版(2021年4期)2021-07-19 09:00:56
河北省科学院学报(2020年1期)2020-05-25 06:57:18
武汉船舶职业技术学院学报(2019年2期)2019-12-27 02:26:37
制造技术与机床(2018年11期)2018-11-23 01:07:50
语文世界(小学版)(2018年3期)2018-03-22 17:50:54
商周刊(2017年12期)2017-06-22 12:02:01
摄影之友(影像视觉)(2016年2期)2016-08-16 06:43:16
海军航空大学学报(2015年1期)2015-11-11 17:18:37
机械制造与自动化(2014年1期)2014-03-01 04:22:01
中华介入放射学电子杂志(2014年1期)2014-02-02 05:24:17