麦克风阵数字助听器实验平台研究与设计*
2011-08-09 08:07:26戴红霞
电子器件 2011年6期
戴红霞 ,王 剑,赵 力*
(1.江苏信息职业技术学院 电子信息工程系,江苏 无锡 214153;2.东南大学 信息科学与工程学院,南京 210096)
随着社会的老龄化及先天因素,很多人都有不同程度的听力障碍。助听器(hearing aid)一切有助于听力残疾者改善听觉障碍,进而提高与他人会话交际能力的工具、设备、装置和仪器等。但是,现实中,许多种类的噪声影响了声音质量,造成助听效果的下降。麦克风阵列在选择性增强感兴趣的语音信号并同时压制噪声和干扰有相当重要的实用价值[1]。
传统的基于传感器阵列的声源定位技术分为基于最大输出功率的可控波束形成法[2]、高分辨率谱估计法[3]和到达时间差(Time Difference Of Arrival,TDOA)[4]的声源定位法。基于最大可控响应功率的波束形成方法是早期的一种定位方法,但是其理论和实际的性能差异很大,而且依赖于声源信号的频谱特性。基于子空间技术的声源定位算法来源于现代高分辨谱估计技术,具有较高的空间分辨率,但是在噪声和混响严重的情况下,定位效果不佳。基于时延估计的方法运算量相对较小,实时性较好,但用于多声源定位时,性能严重下降。当在阵列间距足够大,阵元足够多的情况下,不同麦克风阵元接收到的信号差异大,定位的参数(如TDOA)比较容易获得,上述传统方法都容易达到较高的定位精度。可是,实际应用中,麦克风阵列的尺寸有严格的限制,如智能的听力设备[5]。由于声源传播的物理特性本身的限制,阵元间间隔越小,有效的定位参数越小,对于间隔1 mm 的阵元,如果要获得8 位分辨率的TDOA,就要求采样频率至少为100 MHz。采样频率越高意味着要实时处理的数据越多,实时性越差,而且频率越高,功耗越大,也越容易受电路噪声影响。而且语音是宽带信号,以往的窄带信号算法都不再适用。另外,语音的混响和有色噪声的存在,都是影响语音质量和算法性能的很重要的因素,必须予以相当的重视,考虑解决办法。
麦克风阵列的应用能够提高助听器的效果。在这样的应用背景和目的下,本文对助听器算法开发平台及相关算法进行了设计。现在适于音频应用开发的硬件器件种类很多,关于语音和麦克风阵列也有很多效果显著的算法,但在助听器应用背景下,结合实时性的特殊要求和限制,不得不对硬件的搭配以及算法进行合理的取舍。在综合考虑功耗限制,算法复杂度,数据处理能力,多路音频输入及接口限制等等因素后,选择了以TI 公司的TMS320C6747DSP 芯片及TLV320AIC32 立体声音频编解码器作为主要部件,搭建了助听器算法开发平台。并且在该平台上,本文对声源定位算法做了详细研究,提出了提高语音质量的方法。
1 系统说明
系统框图如图1所示。
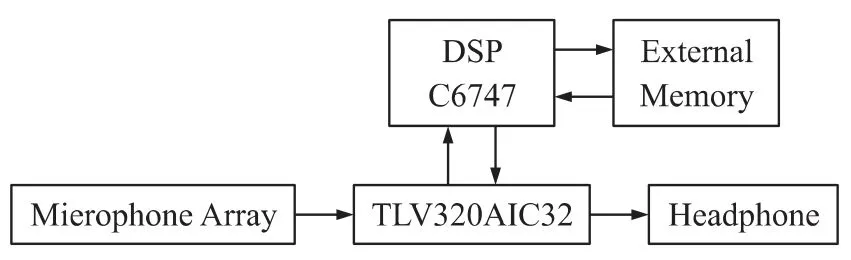
图1 麦克风阵数字助听器系统框图
系统主要包括DSP模块(TMS320C6747 芯片),音频采集模块(TLV320AIC32),外部存储模块(External Memory),麦克风阵列(Microphone Array)与耳机(Headphone)。麦克风阵列,可尝试采取不同的拓扑结构,但由于是用于助听器,尺寸大小必然是受到限制的,而不论采用将阵列佩戴在胸前,或者置于眼镜架的方式,都不可能过大。
本方案选择TI 公司的高性能浮点DSP 芯片TMS320C6747 作为信号处理核心,考虑如下:(1)助听器系统对实时性的要求很高,算法所涉及到的运算比较复杂,且随着麦克风数量的调整及其拓扑结构的变化,算法的复杂度可能增加。控制优化类DSP 系列TMS320C2000 芯片和低功耗DSP 系列TMS320C5000 系列都不能满足实时处理的要求。(2)C674X 系列DSP 芯片为浮点型DSP,可实现算法高精度和信号大动态范围。(3)助听器属于便携式产品,且为了延长其单次使用时间,应尽量降低其功耗,与其他C6000 系列DSP 相比,TMS320C6747芯片有突出的低功耗的优点。
低功耗立体声音频编解码器TLV320AIC32[6],这款TI 公司的低功耗立体声具有6 路音频输入引脚,适于麦克风阵列的应用。DSP 与音频编解码器的接口,根据完成的功能分为两个接口。
首先是控制接口。DSP 可以依据不同的条件和需要,对编解码器内部寄存器进行设置来灵活地配置编解码器的工作方式。音频编解码器的控制接口与DSP 的IIC 接口相连接。
其次,音频数据接口与DSP 的MCASP 接口,以IIS模式相连接。
其中,BCLK 是AIC32 的比特时钟信号,由于AIC 一般情况下工作于从模式,所以该信号由DSP生成,并通过ACLKX 引脚传送给AIC32。由于DSP与AIC32 的通信是相互独立的全双工通信,所以需要双向的帧同步信号以协调通信,由AFSX——LRCIN,LRCOUT——AFSR 两条 通道完 成。Serializer1——DIN 以及DOUT——Serializer2为双向数据通道。连接关系图2所示。
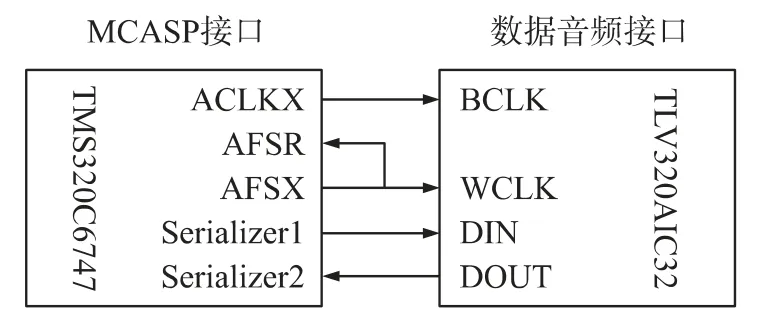
图2 DSP 与音频编解码器的音频数据接口
2 声源定位算法原理
声源定位是麦克风阵列很重要的一个功能,即判别声源相对于阵列处所处的位置。采用2种模型[7]:近场模型和远场模型。在助听器应用中,一般情况下,声源与阵列的距离远大于阵列的大小,故采用远场模型。在远场模型的条件下,同一声源传播各麦克风的路径被认为是相互平行的,因而无法或者很难借助于三角知识估计声源到麦克风阵列的距离。我们的任务是,估计声源到阵列的直接传播路径与某一参照之间的夹角,比如选择阵列中轴线作为参照。
本文所设计的平台最多可接纳6 路麦克风输入,由于不同的麦克风拓扑结构有显著的复杂度差异以及时延估计方法。
基本原理:利用麦克风阵列进行声源定位,等同于对麦克风信号的时延估计(TDE,即Time Delay Estimation)[7]。假设我们使用的麦克风阵为N个麦克风的线性排列,声源为s(k),经过声音传播路径到达第n个麦克风时为xn(k),第n个麦克风在k 时刻接收到的信号为yn(k),噪声为vn,为了表示出实际情况中的混响[8],我们假设声源到第n个麦克风之间的信道的信道冲激响应为gn,并且假设在短时间内该信道冲激响应是恒定不变的,可用一个长度为L 有限长滤波器(FIR)来表示为gn=[gn,1gn,2… gn,L]T。这样,信号模型应该为

先讨论不受噪声影响的情况,即假设Vn=0。
那么,在没有噪声时有

若另外定义第n个麦克风受到按时间的降序排列的信号向量

则可用向量的乘法等效替代式(1)中的卷积运算[9]得到

定义
但以上的基本方法只考虑了无噪声,当然也可以容易的推导至白噪声的情况。但实际应用中,有色噪声的情况是常见的。利用广义特征值分解进一步推广,可以提高算法在存在有色噪声,且信噪比不高的情况下时延估计的精确性。
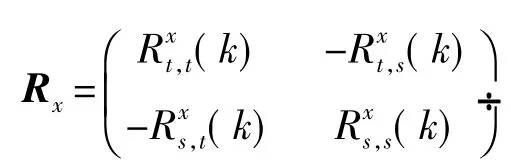
在存在有色噪声的情况下,则接受信号的自相关阵为
根据上述原理,通过自适应算法,我们可以求得信道的实验估计。
3 仿真结果
仿真中所用的信道响应采用的模型借鉴了Stephen G.McGovern 的方法[10],简单的说,即是假设在一个矩形的房间内,声源位置与阵列位置固定,忽略其他物品对声音的反射,仅考虑前后左右上下六面墙壁对声音的多次反射,反射系数恒定,且可人为设定。在该模型下,在一个长宽高分别为4 m、5 m、3 m 的房间内,在某一位置,单一声源到2个相距13 cm 的麦克风的信道响应分别为g0和g1,如图3所示。

图3 信道幅度响应
可以看到2个信道响应中,除了各自的直接路径响应外(第一个非零点),还存在许多混响,这符合室内语音传播的实际情况。同时,混响也是在室内影响和制约各种语音信号算法的最重要因素。我们的目标就是估计出2 条直接路径间的时延差。
仿真算法采用了GEVD 的自适应算法。利用上面的信道响应,在16 kHz 采样率下,假设存在有色噪声,且初始信噪比约为10 dB。算法得到的时延估计收敛到真实值的时间如图4所示。横坐标单位为采样点数。
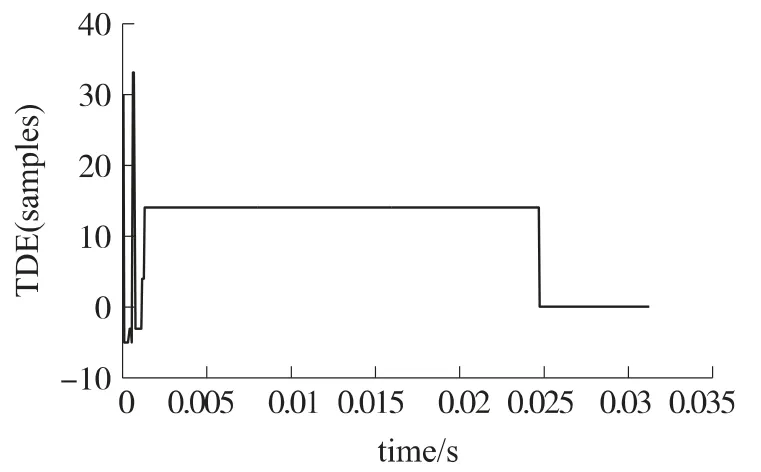
图4 时延估计收敛时间
经过大量实验,可以看到使用一帧数据后,收敛时间在20 ms~30 ms 之间波动,基本上满足助听器的实时性需要。但在这样的收敛速率下,16 ksample/s的采样率是必须的,采用更高的采样率则收敛速率将更快,倘若更低,将无法满足估计时延所需的数据量要求。
4 结论与讨论
麦克风阵列的应用能够提高助听器的效果。在这样的应用背景和目的下,本文对助听器算法开发平台及相关算法进行了设计。现在适于音频应用开发的硬件器件种类很多,关于语音和麦克风阵列也有很多效果显著的算法,但在助听器应用背景下,结合实时性的特殊要求和限制,不得不对硬件的搭配以及算法进行合理的取舍。在综合考虑功耗限制,算法复杂度,数据处理能力,多路音频输入及接口限制等等因素后,选择了以TI 公司的TMS320C6747DSP 芯片及TLV320AIC32 立体声音频编解码器作为主要部件,搭建了助听器算法开发平台。
[1]杜江,朱柯.智能麦克风阵列语音分离和说话人跟踪技术研究[J].电子学报,2005,33(2):382-384.
[2]Shao L,Yang DG,Li B,et al.Development of Acoustic Vidicon Based on Binocular Vision and Microphone Array[J].Chinese Journal of Scientific Instrument,2009,30(4):823-827.
[3]Sarradj E.A Fast Signal Subspace Approach for the Determination of Absolute Levels from Phased Microphone Array Measurements[J].Journal of Sound and Vibration,2010,329(9):1553-1569.
[4]Cai W Q,Wang S K,Wu Z Y.Accelerated Steered Response Power Method for Sound Source Localization Using Orthogonal Linear Array[J].Applied Acoustics,2010,71(2):134-139.
[5]Miles R N,Hoy R R.The Development of a Biologically-Inspired Directional Microphone for Hearing Aids[J].Audiology and Neuro-Otology,2006,11(2):86-94.
[6]白桦,冯立杰,杜宇,等.基于DM6446 的嵌入式语音传输平台设计[J].微计算机信息,2009,25(10-2):44,72-73.
[7]Benesty J,Chen J,Huang Y,et al.Microphone Array Signal Processing[J].The Journal of the Acoustical Society of America,2009,125(6):4097-4098
[8]Champagne B,Bedard S,Stephenne A.Performance of Time-Delay Estimation in the Presence of Room Reverberation[J].Speech and Audio Processing,IEEE Transactions on,1996,4(2):148-152.
[9]Stewart G W.The Decompositional Approach to Matrix Computation[J].Computing in Science & Engineering,2000,2(1):50-59.
[10]Allen J B,Berkley D A.Image Method for Efficiently Simulating Small-Room Acoustics[J].Journal of the Acoustical Society of America,1979,65(4):943-950.
猜你喜欢
舰船科学技术(2022年11期)2022-07-15 07:54:30
中老年保健(2021年7期)2021-08-22 07:40:58
复旦学报(自然科学版)(2019年3期)2019-07-19 09:48:04
复旦学报(自然科学版)(2019年3期)2019-07-19 09:48:04
电子制作(2019年23期)2019-02-23 13:21:12
电子测试(2018年23期)2018-12-29 11:11:24
小学科学(2016年12期)2017-01-06 19:36:17
小布老虎(2016年12期)2016-12-01 05:47:08
噪声与振动控制(2016年5期)2016-11-09 09:09:47
发明与创新(2016年26期)2016-08-22 03:23:28