用于快速块运动估计的多方向钻石搜索算法*
2011-08-09 08:07:30阴法明
电子器件 2011年6期
阴法明
(南京信息职业技术学院,南京 210013)
由于视频序列的相邻帧间具有很高的时间相关性,视频编码系统可以通过降低时间冗余度而获得高压缩率。帧间编码利用前面的帧(或参考帧)预测当前帧,降低连续帧间的时间冗余度。运动估计是帧间编码的核心技术。相比于其他运动估计算法,块匹配技术因为其简单性与易于实现性,而被广泛应用于许多视频编码标准中,如MPEG2、H.26x。在块匹配技术中,每帧都被划分成块,每块都对应一个运动矢量。运动预测通过搜索为当前帧的每个块产生一个运动矢量,它指向参考帧中的最佳匹配块。该最佳匹配块作为当前块的预测值。
全搜索(Full Search,FS)块匹配算法是最简单的,并且性能最好。其缺点是计算复杂度大。它搜索参考帧搜索范围内的所有点,从而产生最佳匹配点。如果搜索窗在水平与垂直方向上的最大运动分量为±W,每块需要搜索的点数为(2W+1)2。为了降低计算复杂度,快速搜索算法成为人们研究的重点。现在,典型的快速算法有3 步搜索(TSS)[1]、新3 步搜索(NTSS)[2]、4 步搜索(FSS)[3]、基于块的梯度下降搜索(BBGDS)[4]、钻石搜索(DS)[5]、1 次1 步搜索法(One-at-a-time Search,OTS)[6]等。
TSS 由3 步组成,每步包含均匀空间分布的9个点。并且每步之后,点之间的距离都会变小,前1步的最佳备选点作为当前的中心点。TSS 第1 步采用大搜索模板,使得其在搜索小运动量块时显得低效。这与现实视频序列的运动矢量的中心偏置特性相矛盾[2]。NTSS 通过在TSS 第1 步的中心点周围添加8个点,解决了这一问题。同时NTSS 允许在第1、第2 步后提前中止搜索,所以其搜索速度比TSS 要快,并且具有较好的搜索质量。但对于拥有大量较大运动矢量的序列,NTSS 的计算量要比TSS的大。FSS 搜索质量与NTSS 相仿,并优于TSS。
本文第1 部分,讲解视频编码中块匹配运动估计算法的基本原理。DS、OTS 两种快速搜索算法将在第2 部分中进行介绍。第3 部分提出多方向钻石搜索(MDDS)算法。第4 部分进行试验。最后,第五部分对实验结果进行分析。
1 基于块的运动估计基本原理
块匹配运动估计就是将图像划分成许多互不重叠的子块,并假定子块内的所有象素具有运动一致性,且只作平移运动,然后对当前帧图像的每一子块(也即宏块),在参考帧的一定范围内按照一定的匹配准则进行匹配,搜索与当前子块最相似的块,即最佳匹配块,由最佳匹配块与当前子块的相对位置的偏移量,即为当前子块的运动矢量,如图1所示。
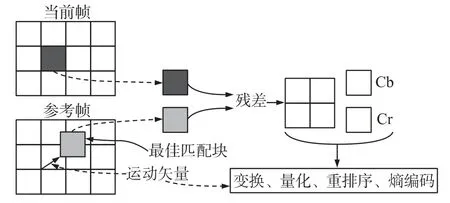
图1 基于块的运动估计基本原理
为了判定最佳匹配块,首先定义块误差准则(Block Distortion Measure,BDM)。本文选择绝对误差和(Sum of Absolute Difference,SAD)作为BDM。其定义如下:
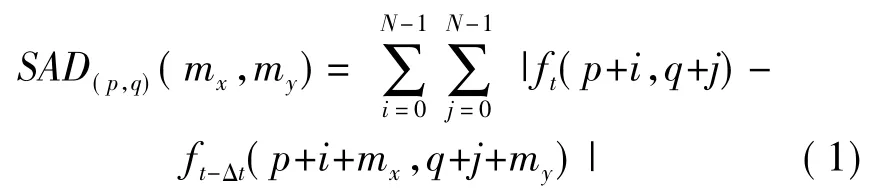
其中,-W≤mx,my≤+W。每个N×N 块的左上角在当前帧ft中的坐标为(p,q),它通过运动矢量(mx,my)在重建帧ft-Δt中得到同样大小块的预测值。
2 基础算法简介
2.1 钻石搜索算法
DS 算法使用两种搜索模板:大钻石搜索模板(Large Diamond Search Pattern,LDSP)与小钻石搜索模板(Small Diamond Search Pattern,SDSP),如图2所示。
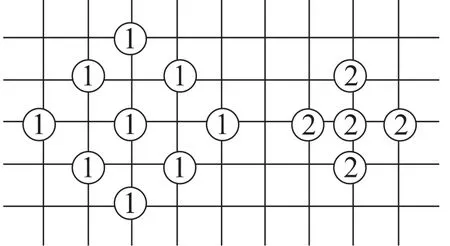
图2 大钻石搜索模板(LDSP)与小钻石搜索模板(SDSP)
大钻石搜索模板由9个点组成,小钻石搜索模板则为5个。该算法步骤如下:
第1 步:将LDSP 放在搜索窗口的中心,计算模板上每个点的SAD。如果最小SAD点在LDSP 的中心(c,c),则跳至第3 步。否则进入第2 步。
第2 步:如果上一步的最小SAD点在LDSP 的顶点,如(c-2,c)、(c+2,c)、(c,c-2)或(c,c+2),则将进行顶点搜索。如果上一步的最小SAD点在LDSP 的边上,如(c-1,c+1)、(c-1,c-1)、(c+1,c+1)或(c+1,c-1),则进行面搜索。
顶点搜索:以上一步的最小SAD点为新的LDSP 的中心,更新中心点(c,c),并计算新增五个点的SAD。例如最小SAD点在(c,c+2),新的LDSP位置如图3(a)所示。
面搜索:以上一步的最小SAD点为新的LDSP的中心,更新中心点(c,c),并计算新增三个点的SAD。例如最小点在(c+1,c+1),新的LDSP 位置如图3(b)所示。
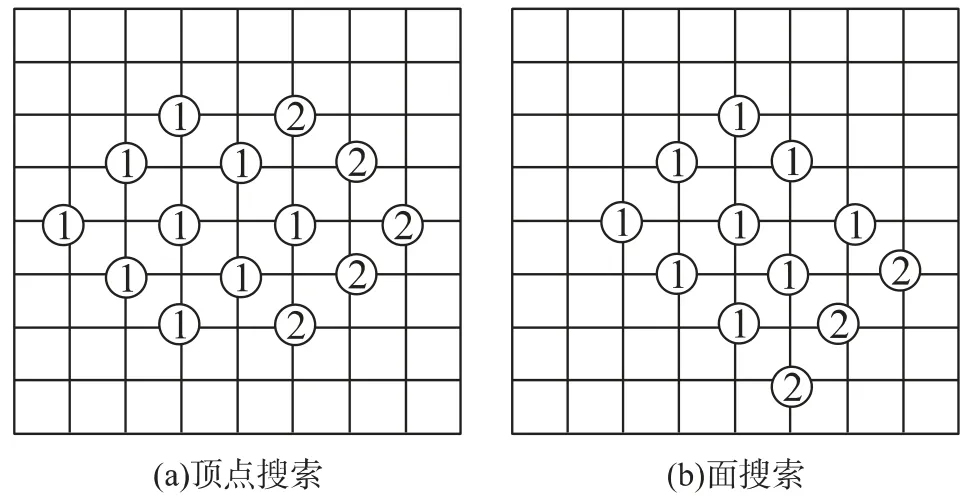
图3
如果模板覆盖的点超出搜索窗的边界则忽略。当新的最小SAD点出现在(c,c),跳至第3 步。否则,循环执行第2 步。
第3 步:在点(c,c)使用SDSP,计算最后一个大钻石搜索模板内部四个点的SAD。类似,如果备选点超出搜索窗边界,则忽略。最小的SAD点对应的运动矢量作为预测块的最终运动矢量。当前块的搜索过程完成,可以进行下一块的搜索。
2.2 一次一步搜索算法
基于块的运动估计算法OTS 是由R.Srinivasan和K.R.Rao 在1985年首次提出[6],在水平和垂直方向上先后应用OTS 搜索策略。一个OTS 搜索路径的例子如图3所示。首先,搜索窗中心及其水平方向上相邻的两个点先被搜索,即(0,0)、(-1,0)、(1,0)三个点。如果最小SAD点是搜索窗中心的左边点(-1,0),则OTS 向搜索窗左边执行;如果最小SAD点搜索窗中心的右边点(1,0),则OTS 向搜索窗右边执行。当最小SAD点出现在水平方向3点的中间时,OTS停止执行。该点被看作搜索窗中心水平方向上的最小SAD点,假设为(s,0)。垂直方向的OTS 于此类似,首先搜索(s,1)、(s,-1)两点。比较垂直方向上相邻3点的SAD,如果最小SAD点为(s,1),OTS 则沿着(s,1)向上执行;如果最小SAD点为(s,-1),OTS 则沿(s,-1)向下执行。垂直方向上OTS 终止条件与水平方向上的相同。此时得到的最小SAD点对应的MV 便是当前块的最终预测MV。简而言之,OTS 算法在误差平面上进行两次一维的梯度下降搜索。虽然与其他搜索算法相比,只需要搜索很少的点,但搜索的质量很低。因为一维梯度下降搜索算法不能有效搜索到全局最佳匹配点的位置。
如图4所示,一个用OTS 算法搜索的路径例子,最终得到的最佳匹配点为⑦。
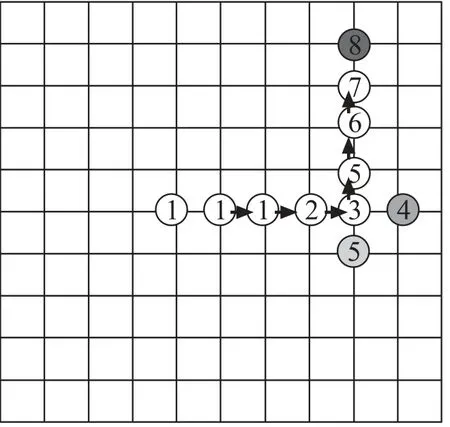
图4 OTS 算法实例
3 多方向钻石搜索算法
DS 算法只考虑块误差梯度下降最大的方向,从而降低了得到最佳匹配点为全局最优的概率,本文提出了多方向钻石搜索法。该方法为了考虑到SAD 可能下降的每个方向,在钻石搜索法的第1 步之后,对LDSP 外围8个点中小于中心点SAD 的方向上执行OTS。
MDDS 算法中,LDSP 对应的8个方向如图5所示。
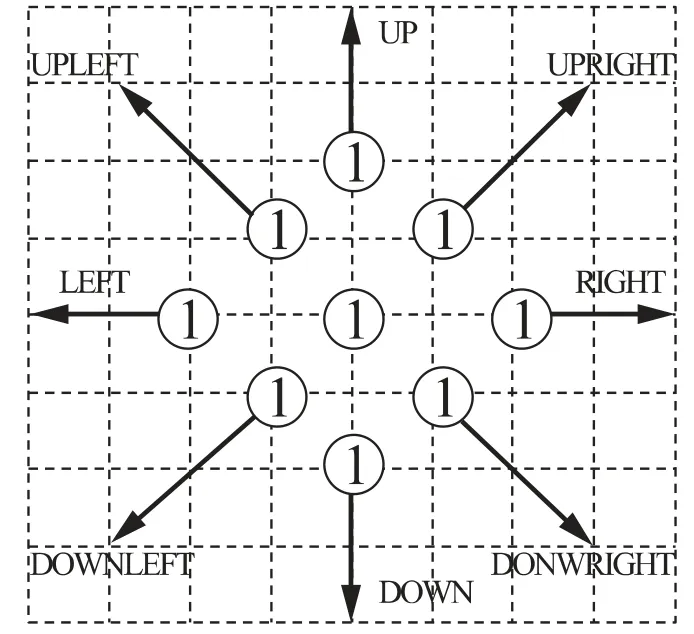
图5 LDSP 对应的八个方向
MDDS 算法的运行步骤如下:
开始 以搜索窗的中心为起点,开始使用模板LDSP。先计算LDSP 中心点的SAD,并用中心点信息初始化临时最佳匹配点的位置与SAD。
第1 步 计算LDSP 其它8个点的SAD。如果有点的SAD 小于中心点的SAD,则在该方向上执行OTS。将OTS 后的最小BMD 与临时最佳匹配点的SAD 比较,如果小,则更新临时最佳匹配点的位置信息与SAD值。如果中心点为最小SAD点,则跳至第3 步。否则进行第2 步。
第2 步 以上一步得到的临时最佳匹配点为中心,重复执行第1 步。
第3 步 使用SDSP,搜索LDSP 内部剩余的4个点,得到的最小SAD点作为最佳匹配点。
一个用MDDS 算法搜索的路径如图6所示。其中虚线表示检测过的SAD 可能下降的方向,实线表示所选择的SAD 下降的方向,即每一步得到的最小SAD点。
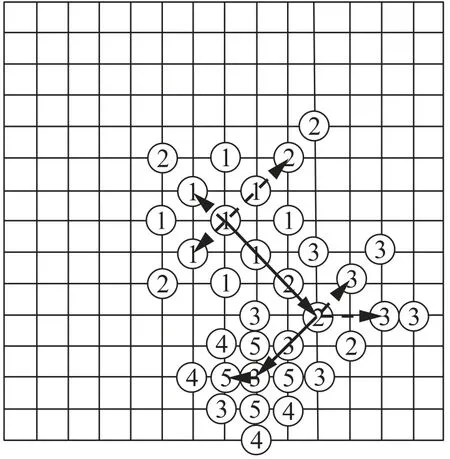
图6 MDDS 算法实例
4 测试结果
本文选取的测试模型为JM,版本为15.1,测试序列为CIF4:2:0 格式,其中Football、Ice 具有高度空间细节与大量运动;Soccer 具有中度空间细节和中量运动;Silent、Coastguard 具有中度空间细节和少量运动;Flower 具有低度空间细节和少量运动。W 取16,序列长度为100 帧,帧率为30 帧/秒,采用5个参考帧。序列编码方式为IPPP…,即第1 帧为I 编码,剩余99帧采用P 编码。I 帧的QP(量化参数)设为36,P 帧的QP为38。帧间编码只采用16×16 的宏块。熵编码方法为基于上下文的二进制算术编码。相互比较的搜索算法有:FS、NTSS、FSS、BBGDS、DS 与本文提出的MDDS。性能比较的参数为PSNR 与平均搜索点数(Average Number of Searched Points,ANSP)。实验结果如表1所示。
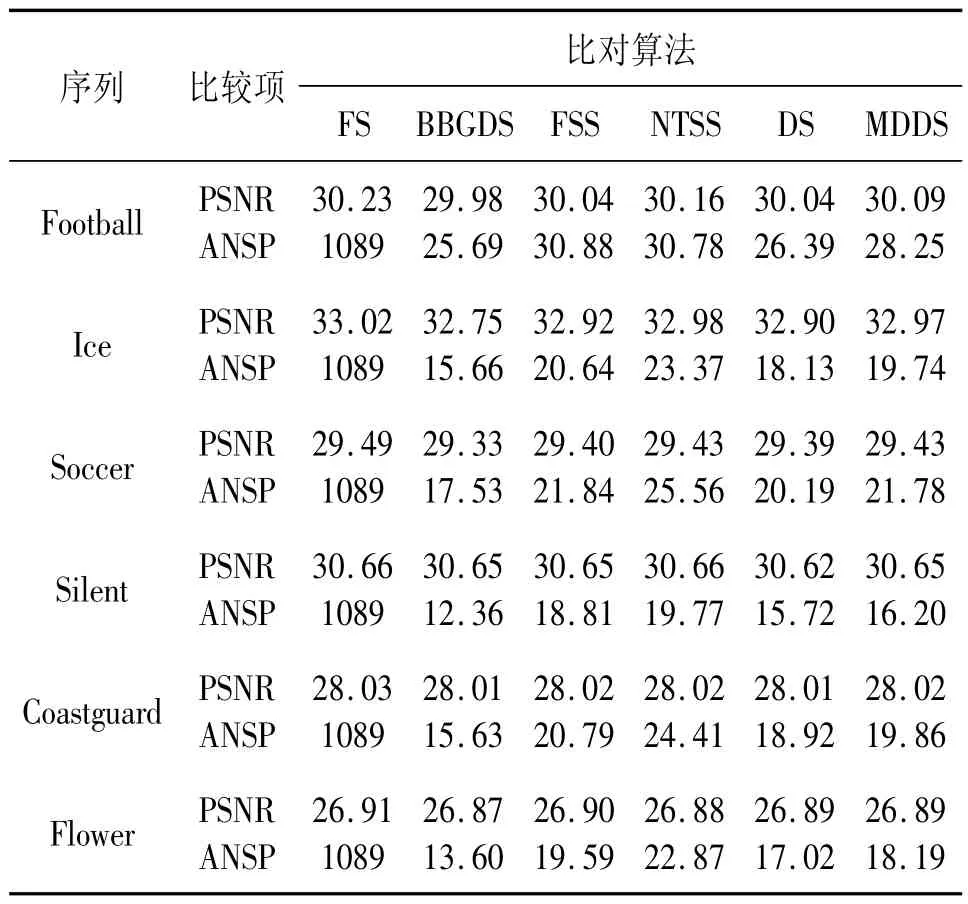
表1 MDDS 算法与FS、NTSS、FSS、BBGDS、DS 算法测试结果 单位:dB
5 小结
从表1 可以看出,FS 能够取的最好的搜索质量,但其计算复杂度太大。快速搜索算法在提高搜索速度的同时,很小程度的降低了搜索质量。总体来说,前四个快速搜索算法中,BBGDS 搜索速度最快,但质量也是最差的;FSS 算法搜索速度比较慢,对于帧间图像含有少量运动的序列性能最好;NTSS 搜索速度最慢,但搜索质量最佳,尤其是帧间图像具有大量运动和丰富空间细节的序列,对于帧间图像具有少量运动的序列性能一般。DS 算法搜索速度仅次于BBGDS 算法,但性能不如FSS 算法与NTSS 算法。

表2 MDDS 算法与DS 性能比较 单位:dB
如表2所示,本文提出的MDDS 搜索速度略低于DS,每个16×16 宏块平均多出0.48~1.86个搜索点,性能有很大提升,PSNR 最多提高了0.07 dB。序列帧间图像的运动量越大,空间细节信息越丰富,性能相对提高的越多。对于帧间图像含有中量与大量运动的序列,其性能略次于NTSS 算法;对于帧间图像含有少量运动的序列,性能持平或好于NTSS 算法。因此,该算法在搜索速度与性能上都具有一定的竞争优势。
[1]Koga T,Iinnma K,Hirano A,et al.Motion-Compensated Interframe Coding for Video Conferencing[C]//Nut.Telecommun.Con,pp.G5.3.145.G5(3).145-153.1981.
[2]Li R,Zeng B,Liou M L.A New Three-Step Search Algorithm for Block Motion Estimation[J].IEEE Trans.Circuits Syst.Video Technol.,1994,4:438-442.
[3]Po L M,Ma W C.A Novel Four-Step Search Algorithm for Fast Block Motion Estimation[J].IEEE Trans.Circuits Syst.Video Technol.,1996,6:313-317.
[4]Liu L K,Feig E.A Block-Based Gradient Descent Search Algorithm for Block Motion Estimation in Video Coding[J].IEEE Trans.on Circuits and Systems for Video Technology,1996,6:419-422.
[5]Tham J Y,Ranganath S,Ranganath M,et al.A Novel Unrestricted Center-Biased Diamond Search Algorithm for Block Motion Estimation[J].IEEE Trans.on Circuits and Systems for Video Technology,1998,8:369-377.
[6]Srinivasan R,Rao K R.Predictive Coding Based on Efficient Motion Estimation[J].IEEE Trans.Commun.,1985,COM-33:888-896.
猜你喜欢
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19 08:38:42
电脑报(2020年12期)2020-06-30 19:56:42
电脑报(2019年4期)2019-09-10 07:22:44
少儿美术·书法版(2016年1期)2016-02-06 00:59:39
大众摄影(2015年9期)2015-09-06 17:05:41
电测与仪表(2015年15期)2015-04-12 00:43:48
河北科技大学学报(2015年5期)2015-03-11 16:16:37
中央民族大学学报(自然科学版)(2014年1期)2014-06-11 01:28:38