二次雷达S模式询问信号的解调译码实现
2011-05-03 09:10韩晓霞田书林
中国测试 2011年4期
韩晓霞,田书林,李 力
(电子科技大学自动化工程学院,四川 成都 611731)
0 引 言
二次雷达也称空管雷达信标系统(air traffic control radar beacon system,ATCRBS),其信号分为询问信号和应答信号2种,频率分别为1030MHz和1 090MHz,将发送信息通过特定的调制方式进行处理后发送。典型的信号模式与调制方式对应关系如图1所示。
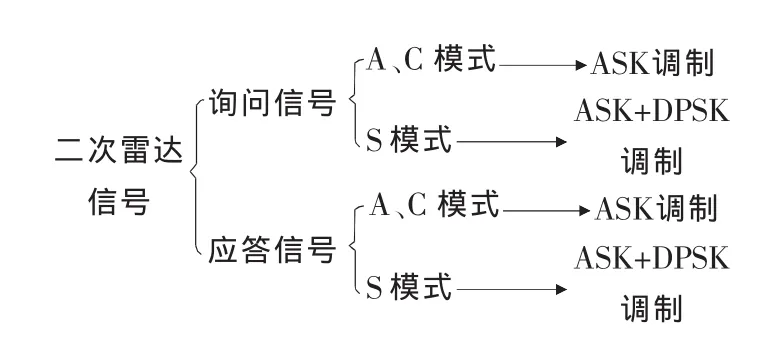
图1 二次雷达信号调制方式
二次雷达信号解码过程可根据其信号特点对应实现。其中A、C询问模式可经过脉冲幅度解调,然后根据解译脉冲的间隔实现译码;A、C应答模式在脉冲幅度解调基础上结合其脉冲框架形状和特殊的码元分布位置实现译码;S模式应答信号的解调译码与A、C模式相似,只是在应答数据部分采用脉位调制方式,1个码元信号分为正反两部分,根据其位置是01或者10的不同来判断码元为0或1。以上3种模式的译码实现均可直接在脉冲幅度阶调的基础上进行,实现方式较为简单。S模式询问信号同时采用了脉冲幅度调制和相位调制2种方式,解译过程中需要通过其脉冲幅度调制信息获得信号框架,而传输的有用信息则需要从相位调制信息中进行提取,解译过程相对比较复杂。该文针对S模式询问信号进行软件译码分析,最终实现信息的恢复,包括信号模式与码元信息[1]。
1 正交解调的原理
调制信号的数学表达式为

式中:ωc——载波角频率。
调制信号分别“寄生”于已调信号的振幅、频率和相位中,相应的调制就是调幅、调频及调相3种调制方式。将式(1)分解,得

其中

式(3)和式(4)分别为调制信号中同相和正交的I、Q分量,它们包含了调制信号的幅度和相位信息。通过对两分量的处理,可以实现对二次雷达信号的解调。正交解调必须首先完成正交分解[2],常用的数字正交下变频法正交分解框图如图2所示[3]。
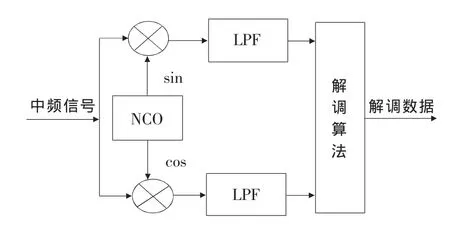
图2 数字正交解调原理图
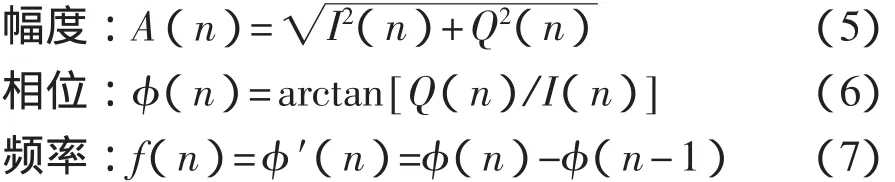
经过数字正交下变频和低通滤波后形成I、Q 2路基带信号,可通过I、Q 2路正交信号计算出信号的幅度和相位等参数,具体算法为[4]
2 软件解调算法及实现
2.1 信号分析
信号分析如图3所示。
(1)S 模式询问信号由 P1、P2、P5、P6等脉冲组成。
(2)其中P1、P2为等幅前导脉冲,为ASK调制信号。
(3)P5是在P6差动相移键控询问信号上覆盖的旁瓣抑制信号,如果同步倒相位置被P5所覆盖,S模式应答机将不会在P6的同步倒相位置中拾到信号,因而S模式应答机将不会对旁瓣信号作回答。
(4)P6前 1.25μs信号为等幅脉波,与 P1、P2同为ASK调制,1.25μs后等幅波的相位倒相180°,此后信号为DPSK信号。之后0.5μs的倒相等幅波作为第1码元前的起始基准相位。串行的“码元”中把信息存在P6之内,第1码元开始产生在同步倒相(SPR)之后的0.5μs处。
(5)DPSK调制信号即是利用前后码元的相对载波相位值传送数据信息。由前面可知DPSK信号位于P6脉冲中,包含“起始基准”、“码元信息”和“保护间隔”3部分,进行最终译码的为“码元信息”。信号如图4所示。
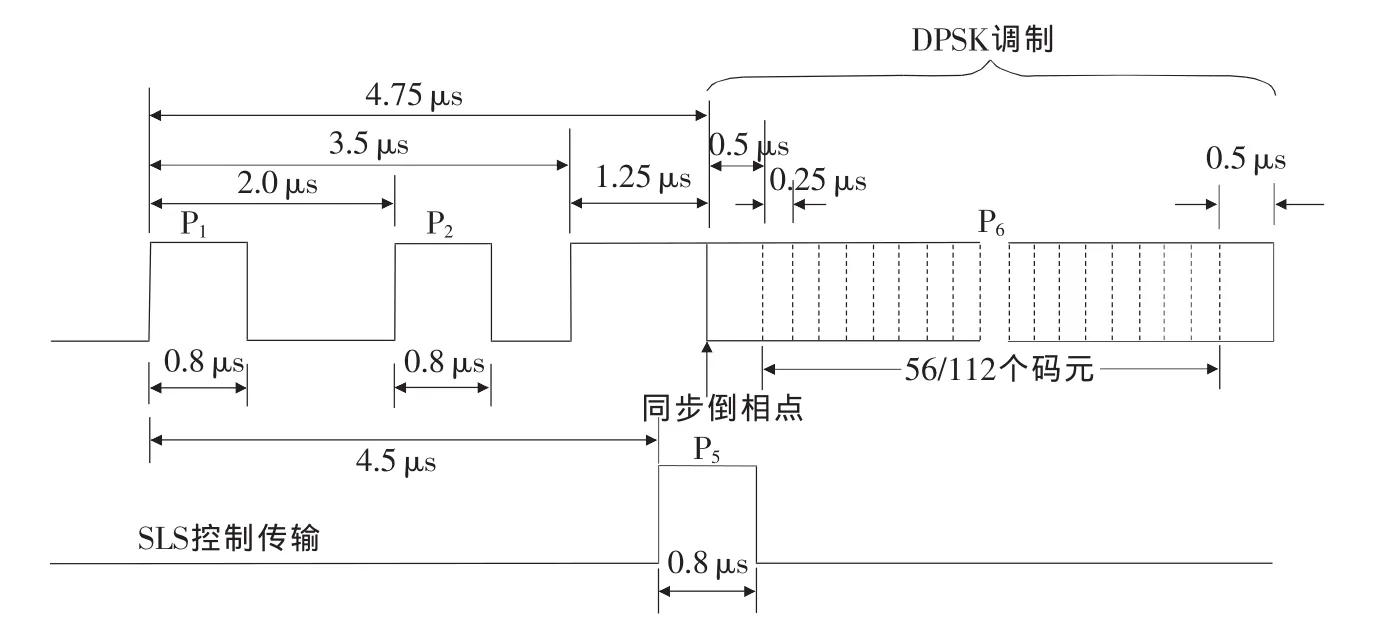
图3 S模式询问信号(ASK+DPSK调制)
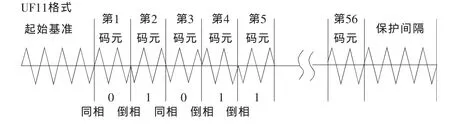
图4 S模式DPSK信号
(6)S模式询问信号分为短码、长码2种。短码有 0,4,5,11 号格式;长码有 16,20,21,24 号格式。
2.2 传统的载波恢复方法
传统的对S模式询问信号进行解调的方法是采用载波恢复的方式。
2.2.1 载波峰值恢复
处理方法:将中频采集数据进行由小至大排序,然后舍弃最大的n个点(剔除毛刺产生的坏点影响),取第n+1个最大点为参考最大值点V1,之后取符合条件|Xi-V1|<δ的第(n+1)~(n+m)共 m 个点作平均得到最大值Vmax,最后用类似方法求得最小值点Vmin,计算得到峰值 Vp=Vmax-Vmin。
存在的问题:当采样数据在一个周期内采样点数比较少时,不能保证采样到峰值数据,有一定的缺陷。
2.2.2 载波相位恢复
处理方法:在已知峰值数据Vp的情况下,由于f(t)=Vp·cos(ωt+ph),可根据任意点的采样值求解得到对应的载波相位ph=arccos(f(t)/x)-ωt。
存在的问题:由于载波频率的影响,可能设定载波频率误差允许范围过宽,则在恢复载波相位时使用误差较大的频率值,导致恢复出的波形上显示与实际载波相位误差明显过大。
2.2.3 载波频率恢复
处理方法:可以考虑为模拟中连续波形的情况,假设以某一点的值L为参考值,在整个波形中寻找这样的点,并对这样的点进行计数(计数值为count)。已知从第1个值为L的点到最后1个点所跨越Ln的时间T_wide,载波周期T=T_wide/(count-1),载频f=(count-1)/T_wide,由于误差的存在,并且实际处理的数字信号一般不可能在每个周期中都找到等于参考值的点,因此需要运用“穿越次数”的思想来对“满足条件”的点进行计数。所谓“穿越次数”,即是以1个固定的值为参考标准值,以在上升沿每穿越1次,进行1次计数,即可以表示在本周期内找到1个“参考值”。
存在的问题:由于采样率和载波频率的影响,不能保证计数终点到计数起点间所跨越的时间为载波周期的整数倍而在最后计算载波频率时产生误差[5-7]。
2.3 信号解调实现
由于传统的采用载波恢复的方法产生的误差较大,需要找到一种正确率更高的方法。在详细分析所要研究的S模式询问信号特点后,可以得出幅度和相位信息是正确译码的关键[8]。已知In,Qn为正交解调n时刻的2路采样值,则:
信号幅度平方(利用信号幅度,找出脉冲)为

信号相位信息:设In-1,Qn-1为n-1时刻I路与Q路的采样值,则

分别为前后2个数据采样点的相位差的正弦、余弦值,分别称之为点积、叉积。由于相位差要么为0(同相),要么为π(反向),因此通过点积值大小或符号可判决相差大小,获取相位信息[9]。
I、Q两路解调信号频率:
式中:f——中频60MHz;
f0——试验中实际采样率200MHz。
该文分别以短码5号格式和长码16号格式为例,对S模式询问信号进行解调译码,DPSK解调实现框图如图5所示。
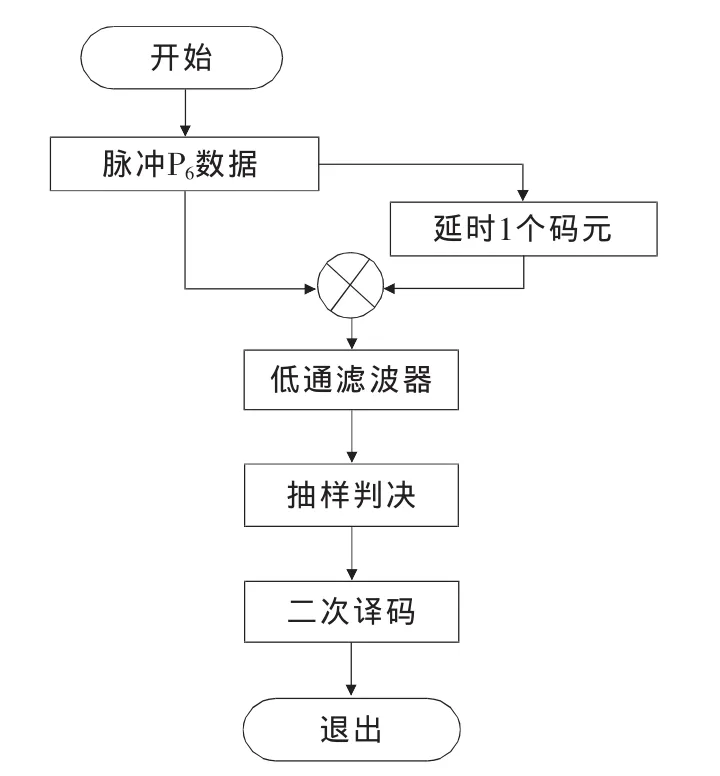
图5 S模式询问信号解调流程图
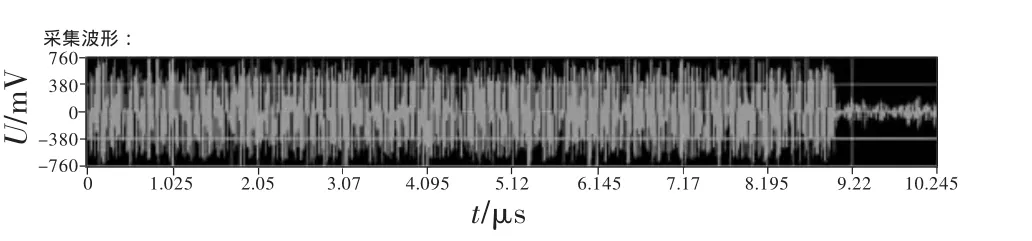
图6 5号格式询问信号中频基带信号
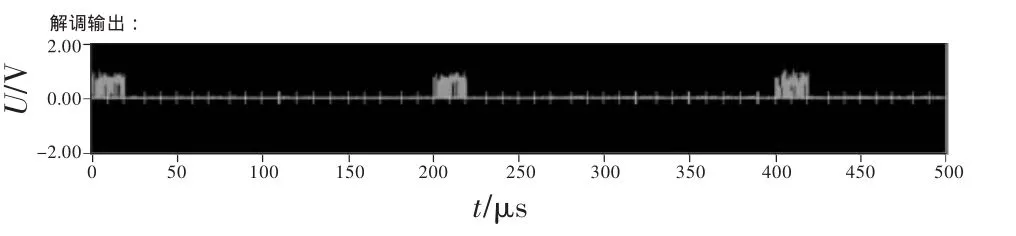
图7 5号格式询问信号解调后的信号
图6为S模式5号格式的中频信号,即接收机接到的信号。经过正交解调的方法处理后,获得信号解调后的包络信号如图7所示。
图8和图9显示的图像分别为长码16号格式中频信号及正交解调后的包络信号。
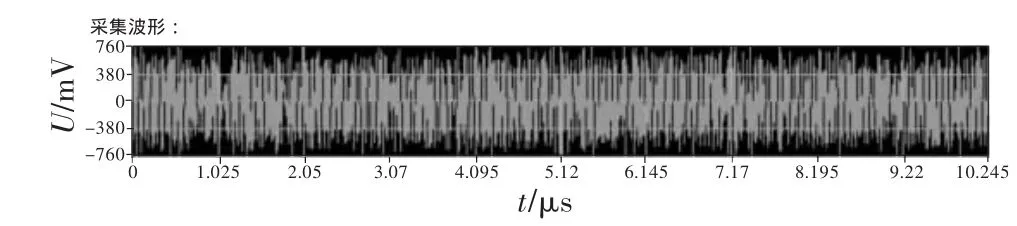
图8 16号格式询问信号中频信号
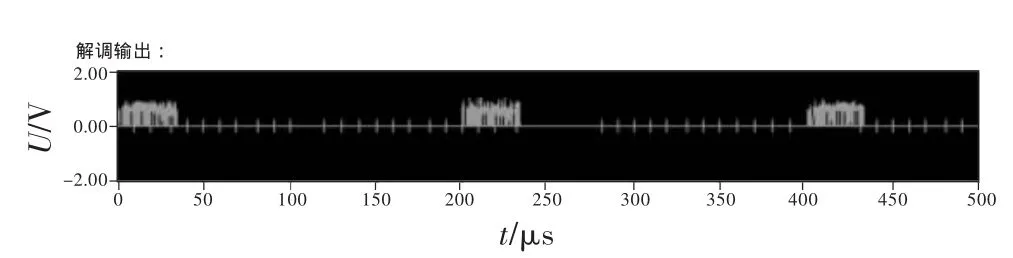
图9 16号格式询问信号解调后的信号
3 译码及结果显示
S模式询问信号DPSK相位解调原则:前后码元相位倒相为1,同相则为0。图10和图11分别为示波器截取的短码和长码DPSK解调之后的P6信号,信号为0、1组成的脉冲。通过对比图形脉冲宽度和码元宽度可以获得P6的码元组成。

图10 短码P6内部码元信息

图11 长码P6内部码元信息
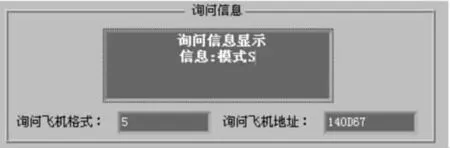
图12 S模式询问信号5号格式译码显示
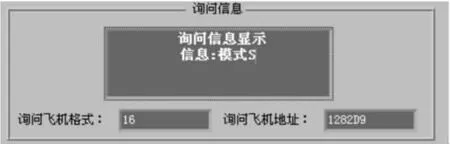
图13 S模式询问信号16号格式译码显示
按照相应的译码规则就能得到S模式询问信号所蕴含的信息[10]。以飞机格式与飞机地址为例:P6码元信号前5位表示飞机格式,最后24位为地址+奇偶校验位。
解译结果如图12和图13所示(其中软件译出的飞机地址以十六进制显示)。
4 结束语
给出了基于正交解调的二次雷达S模式询问信号的软件译码实现,简要介绍了载波恢复方法及注意事项和正交解调DPSK信号的方法。在实际应用中,需要对所研究的信号进行详细的分析,最终选用简单高效的途径。实验证明,该文所介绍的软件译码方式能成功解译接收机所接收信号,误码率较小。
[1]黎延璋.空中交通管制机载应答机[M].北京:中国民航出版社,1992.
[2]曹志刚,饯亚生.现代通信原理[M].北京:清华大学出版社,1992.
[3]赫建华,江修富,许斌.正交调制解调算法在软件无线电中的应用[J].航空电子技术,2005,36(2):6-9.
[4]Diniz P S R,Silva E A B,Netto S L.数字信号处理系统分析与设计[M].北京:电子工业出版社,2005.
[5]杨小牛.软件无线电原理与应用[M].北京:电子工业出版社,2001.
[6]罗吉.数字调制信号识别算法研究[D].成都:电子科技大学,2005:25-32.
[7]吴丹.通信信号调制方式分类识别算法研究[D].成都:电子与信息技术研究院,2007:37-49.
[8]钱晀.IFF信号的分析与识别研究[D].南京:南京信息工程大学,2008:27-33.
[9]赵星.通信信号调制样式识别技术[D].成都:电子科技大学,2006:12-13.
[10]陈长龄,田书林,师奕兵,等.自动测试及接口技术[M].北京:机械工业出版社,2005.
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
通信技术(2021年12期)2022-01-25
沈阳工业大学学报(2021年6期)2021-11-29
导航定位与授时(2021年2期)2021-04-16
现代电子技术(2021年7期)2021-04-08
现代计算机(2021年36期)2021-03-14
河北北方学院学报(自然科学版)(2021年1期)2021-02-25
雷达与对抗(2020年2期)2020-12-25
中国惯性技术学报(2020年2期)2020-07-24
雷达学报(2018年5期)2018-12-05