模糊PID算法在双闭环温控系统中的应用
2011-05-03 09:11程玉华张羽丰
中国测试 2011年4期
苟 轩,谢 华,程玉华,张羽丰
(1.电子科技大学自动化工程学院,四川 成都 611731;2.中国自动化控制系统总公司,北京 100026)
0 引 言
该文研究对象是被动元件生产厂家的元件烧结钟罩窑炉,系统目标是设计一个精度高、动态性能好、工作稳定可靠的温度控制系统。系统以硅钼棒为加热元件,而硅钼棒加热炉是一类具有较大滞后性、非线性、参数时变性的控制对象[1],因此采用了双闭环控制系统。即上层是基于PLC的温度采集、跟踪的外层闭环系统;下层是基于DSP的电流采集、跟踪内层闭环系统。这种控制系统的优点是仅外层的温度控制环节是有滞后的,而内层的电流控制环节响应速度是毫秒级的可以近似认为是没有滞后的,提高了系统控制品质,使系统等效响应时间减小,大大增强了系统抗二次干扰的能力[2]。但由于温控系统具有滞后特性,如果上层系统的输出在动态上不稳定,可能引起下层系统的震荡,从而造成整个系统不稳定。这就要求上层系统具有优良的动态性能,超调小,性能稳定,因此选择使用模糊自适应整定PID算法用于上层系统的控制策略。
1 系统结构
系统的总体结构框图如图1所示。从系统结构框图中可以清楚地看到系统的双闭环结构。
(1)外层系统利用铂铑热电偶为测温元件得到测量值,同时把温度设定曲线对应时刻的值送入PLC模块,通过模糊PID控制策略处理以后输出内层系统所需要的电流设定信号(工业标准4~20mA电流环信号,其他2个送入DSP模块的采样信号相同)。
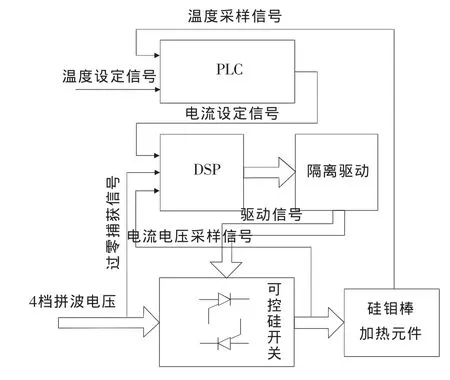
图1 系统总体结构框图
(2)内层系统是通过把流过硅钼棒的电流信号采样值和外层给的电流设定信号采样值送入DSP模块,通过常规PI控制策略处理后,计算出合理的拼波电压档位和拼波角度,可控硅控制信号通过光纤隔离后送入驱动板得到直接能驱动可控硅的开关信号。可控硅在一定通断条件下产生不同大小的拼波电压,对于阻性负载直接对应于该时刻流过硅钼棒的电流。
(3)由于在内层系统选用的单向可控硅,交流正弦电压的正半周和负半周导通的可控硅需要单独的驱动信号,因此引入了过零捕获信号[3],用以告诉系统控制对应的正负半周,并且为拼波角度的计算提供时间基准。
(4)系统还引入了硅钼棒负载的电压采样信号,此信号是用以和电流采样信号一起计算硅钼棒当前时刻的电阻值。用这个电阻值可以先发一个(90%×电流设定值×当前电阻值)的拼波电压,这使得电流设定值有较大波动时电流跟踪速度大大提高。
2 控制策略的选择
硅钼棒加热钟罩窑炉温控系统从总体特性上表现出以下特点:
(1)大滞后大惯性。所有温控系统都会表现出这个特性。
(2)升温单向性。钟罩炉升温和保温是靠加热硅钼棒,降温则是靠自然冷却,因此温度一旦超调以后很难用控制手段使其迅速降温。
(3)特性参数非常数。硅钼棒在室温下电阻值较低,但随着温度升高电阻值急剧增大。
(4)具有一些不可测量的参数。该系统是个复杂的受控对象,很多参数都不容易测量,因此不能建立一个准确的数学模型。
综合上述特点,内层的电流控制系统主要是克服随温度变化电阻值的变化,是一个随动控制系统,一般要求响应快速,允许有余差,因此采用常规的PI控制策略。
而外层温度控制系统是一个定值控制系统,一般要求系统没有静差。因此采用阀值控制与模糊自适应整定PID控制相结合的控制策略[4-5]。为了保护系统和提高加热速度,当设定温度和炉内实际温度偏差|e|较大时,为了提高加热速度,采用阀值控制实现粗调;当偏差|e|较小时,为了防止产生超调,提高控制精度,采用模糊自适应PID控制。
该文主要讨论外层系统的模糊自适应PID控制策略。
3 模糊PID控制策略的实施
根据系统要求和现在模糊PID算法的应用现状,选用二维模糊控制器和PID控制器构成模糊自适应整定PID控制器,如图2所示。
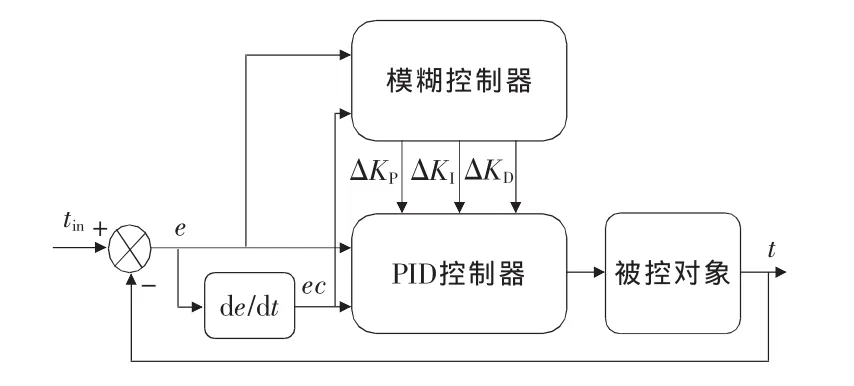
图2 模糊PID控制器示意图
3.1 变量模糊化
根据对精确度的要求和系统特点,将误差e和误差变化率ec的模糊语言E和EC都分为7个语言变量等级,输出变量ΔKP、ΔKI和ΔKD的模糊语言变量用 KP′、KI′和 KD′表示,KP′、KI′和 KD′也分为 7 个语言变量等级,则有

NB,NM,NS,Z,PS,PM,PB 分别代表模糊语言负大,负中,负小,零,正小,正中,正大,相应定义它们的模糊论域为

3.2 选取隶属度函数
考虑到运算简便等因素,选择了三角形隶属度函数。应用Matlab的模糊推理系统编辑器汇出各个隶属度函数曲线[6-7],如图3所示。
3.3 模糊控制规则的确立
模糊自适应整定PID控制参数的基本依据是根据操作者的实践经验和 E、EC 同 KP′、KI′、KD′之间的逻辑关系确定的[8]。
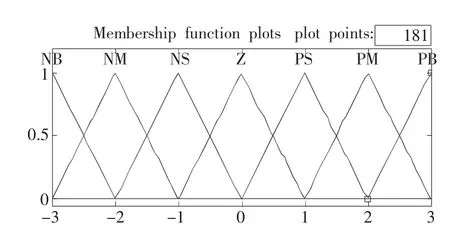
图3 E,EC,K′P,K′I,K′D的隶属度函数曲线
(1)比例环节的主要作用是提高系统响应速度。当偏差e较小时,KP应取较小值,以防止超调量的出现并使系统尽快稳定;同时应考虑偏差变化率ec对KP的影响,当e和ec同号时,即表示输出有偏离稳定值的趋势,这时应该适当增大KP,反之应该适当减小KP。KP的参数调整规则如表1。
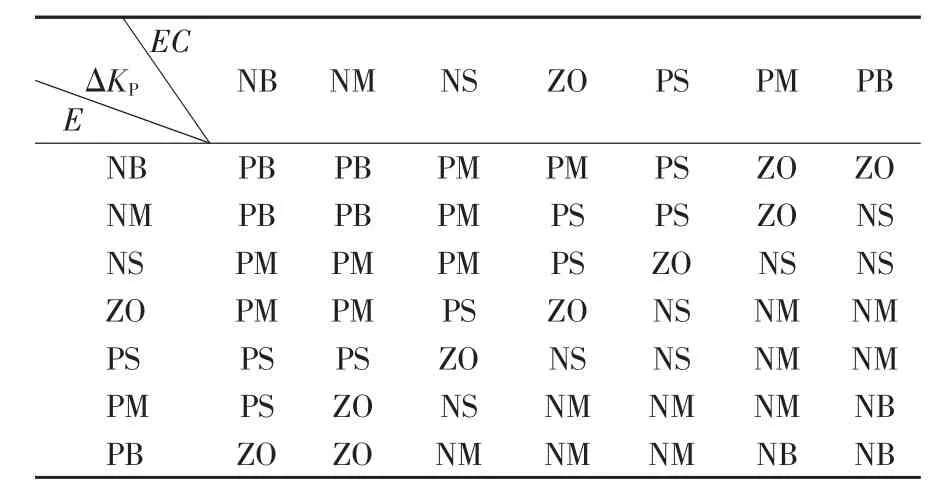
表1 ΔK P的模糊规则控制表
(2)积分环节主要用来消除稳态误差。当偏差e的绝对值较大时,KI取零值或者较小值以避免系统超调后出现震荡;当偏差e的绝对值较小时,积分环节开始有效,KI值应加大以满足稳态使系统对积分的要求,尽快消除静差,KI的参数调整规则如表2。
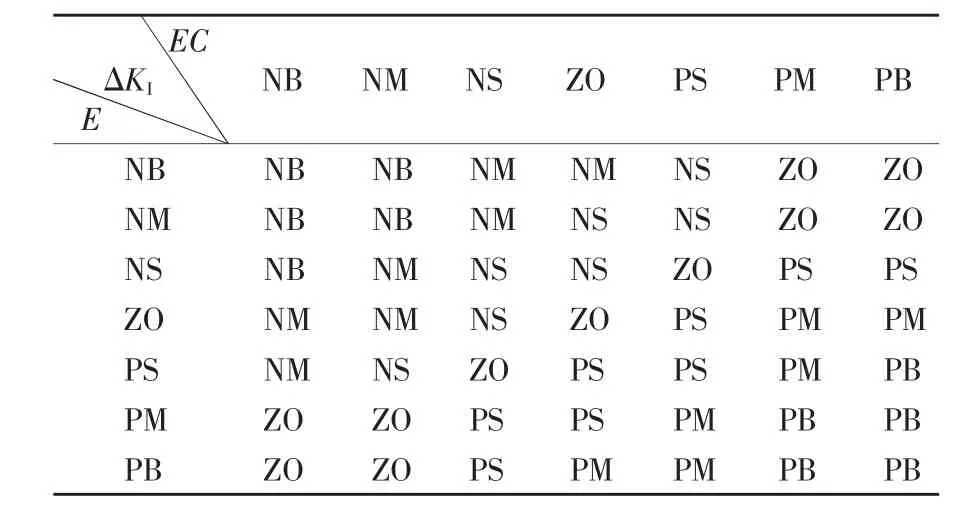
表2 ΔK I的模糊规则控制表
(3)微分环节的主要作用是用来改善系统的动态性能。在偏差量较大的控制过程初期,KD取值不宜过大,为零或较小值;在偏差较小的时候,结合系统的抗干扰能力和系统的响应速度,应使KD取值适当。KD的参数调整规则如表3。
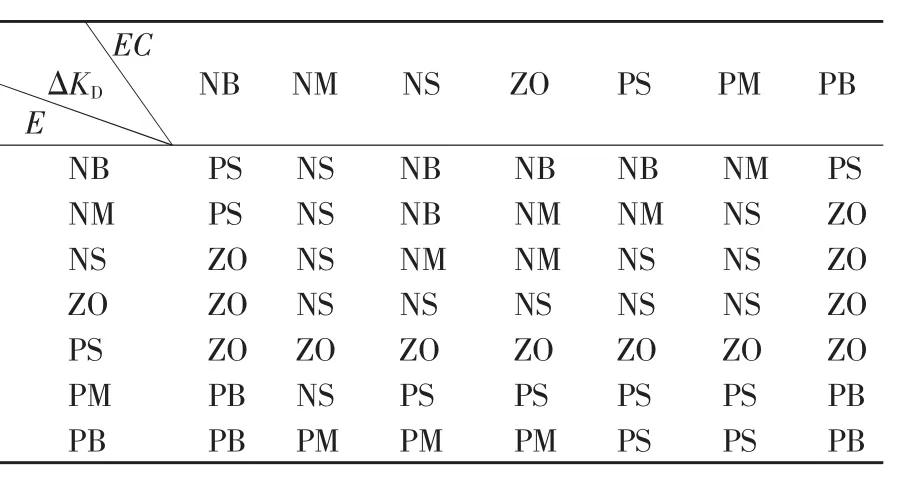
表3 K D的模糊规则控制表
3.4 输出量的清晰化
选择面积重心法求出模糊集合隶属函数曲线和横坐标包围区域面积的重心,选取这个重心对应的横坐标的数值作为这个模糊集合的代表值[9]。该方法的计算表达式为
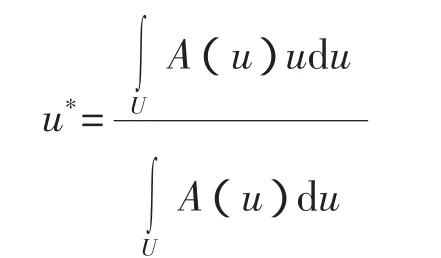
式中:A(u)——模糊集合的隶属度函数;
U——论域;
u*——面积重心横坐标。
借助Matlab工具箱,可以得到精度较高的清晰量,其计算结果如图4所示。
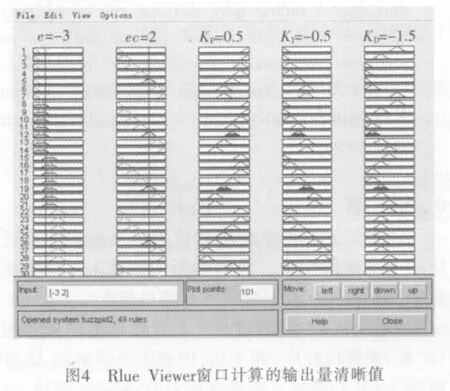
通过 Rlue Viewer窗口对 ΔKP、ΔKI、ΔKD进行清晰量的计算,不断调整E和EC在基本论域的取值,就可以得到对应 ΔKP、ΔKI、ΔKD的清晰值,进而即可得到PID调整参数的清晰值查询表。
4 实验结果
利用西门子公司的PCS7开发套件,采集了实际系统运行时PLC输出的设定电流值,如图5所示。
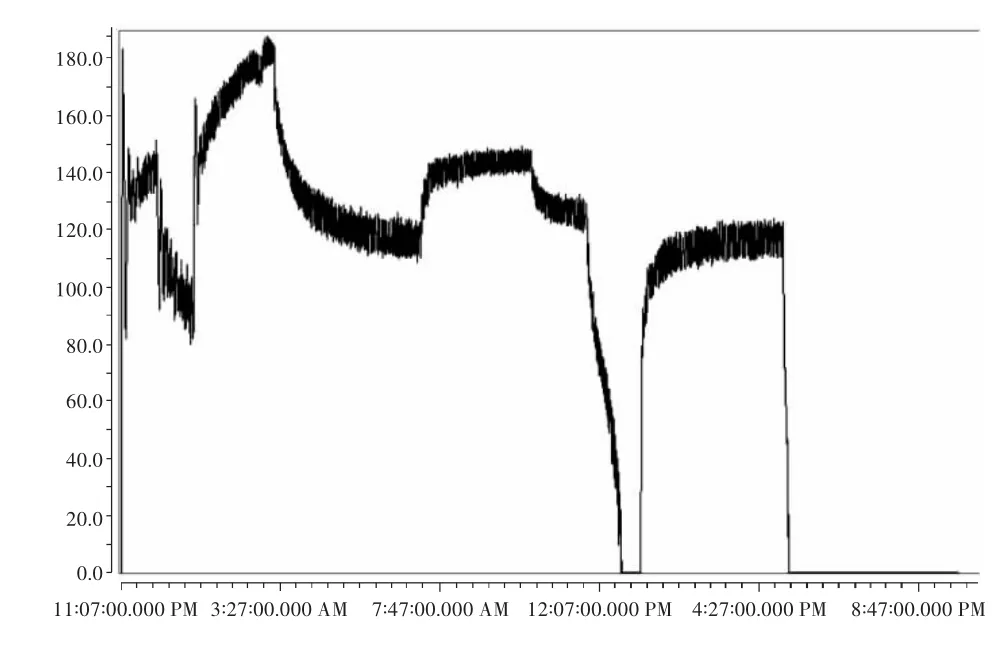
图5 系统运行时PLC输出的设定电流
从图5中可以看出,PLC输出电流比较稳定,震荡较小,只有±5A,而内层的电流控制系统是无滞后系统,且允许有余差,所以能够满足系统要求。这充分肯定了系统选择双闭环系统,上层系统选用模糊自整定PID控制策略的可行性和有效性。
5 结束语
该文介绍了一种工业环境中温控钟罩炉的结构、特性和控制要求,提出了温度-电流双闭环控制结构,并详细阐述了其外层控制策略模糊自适应整定PID控制的实施方案和步骤,得到了良好的控制效果并达到了系统要求。
[1]陈进,王粟.硅钼炉温度控制[J].电子与自动化,1998,27(3):26-29.
[2]李国平.大温度系数负载双闭环全自动控制系统的实现[J].济南大学学报,2003,17(4):351-352.
[3]王志刚,蔡龙喜.新型实用过零触发调功器[J].电子应用技术,1996,15(8):20-21.
[4]荣莉,柴天佑.加热炉过程控制技术的新策略——智能控制[J].控制与决策,2000,15(3):269-273.
[5]蒋芳芳,郑颖.基于模糊PID算法的电阻炉温度控制系统设计[J].电子设计工程,2009,17(6):123-125.
[6]刘金琨.先进PID控制及其Matlab仿真[M].北京:电子工业出版社,2003:63-82.
[7]王沫然.Matlab与科学计算[M].北京:电子工业出版社,2004:98-101.
[8]诸静.模糊控制理论与系统原理[M].北京:机械工业出版社,2005:22-47,106-190.
[9]张国良,曾静,柯熙政,等.模糊控制及其Matlab应用[M].西安:西安交通大学出版社,2002:70-79.
猜你喜欢
中国交通信息化(2020年4期)2021-01-14
中国特种设备安全(2019年9期)2019-12-03
中国惯性技术学报(2019年3期)2019-10-15
学苑创造·B版(2019年2期)2019-02-19
考试周刊(2017年77期)2018-01-30
课程教育研究(2017年28期)2017-08-29
农家科技中旬版(2017年6期)2017-08-15
中小企业管理与科技·上旬刊(2016年12期)2017-01-05
三联生活周刊(2015年26期)2015-06-26
浙江理工大学学报(自然科学版)(2015年4期)2015-03-01