
舰船电力推进系统的矢量控制及其仿真*
2011-04-10 10:42付立军叶志浩吴世君马海鑫
武汉理工大学学报(交通科学与工程版) 2011年2期
纪 锋 付立军 叶志浩 吴世君 王 刚 马海鑫
(海军工程大学舰船综合电力技术国防科技重点实验室1) 武汉 430033)
(海军92337部队舰艇质量验收部2) 大连 116023)
舰船电力系统区别于传统陆地电力系统,属于独立发电供电系统,是舰船正常航行与工作的基础保证,具有单机容量大,负载功率与装机功率可比,负载相对集中,运行工况复杂,故障传播速度快、范围大等特点,而采用电力推进的综合电力系统更包含了高功率密度电机和多种功率等级电力电子装置及其集成技术,智能化高,代表了当今舰船电力系统的发展趋势.由于针对舰船电力系统的物理试验具有一定风险和不可重复性,有必要通过计算机仿真手段对系统的稳态和暂态运行情况进行分析.文献[1-3]探讨了SVPWM 的简化控制算法并给出等效调制函数,文献[4-5]分析并模拟了舰船螺旋桨机械特性,本文在此基础上构建基于矢量控制的电力推进系统仿真模型并搭建试验平台,通过仿真和试验两种方法对比研究电力推进系统中电机运行规律,对比结果证明仿真模型正确,控制方法可行.
1 感应电机矢量控制
在异步电机矢量控制中,定子电流的磁场分量ids设为定值即恒磁通,定子电流的转矩分量

式中:Lr为定子自感;Lm为定转子互感;Te为电磁转矩;pn为极对数;ψdr=ψr=|Ψr|,Ψr为电机转子磁链,且有

其中:Tr=Lr/Rr为转子回路时间常数;p为微分算子.
转差频率

由此可得同步旋转坐标系与静止坐标系之间的相位角

式中:ωe为同步转速;ωr为转子角速度.综合式(1)~(4)可得矢量控制原理[6]如图1所示.
图1中SVPWM模块即空间矢量脉宽调制环节[7],为避免频繁判断空间矢量的扇区并简化控制,采用等效调制函数法,其A相电压调制函数为


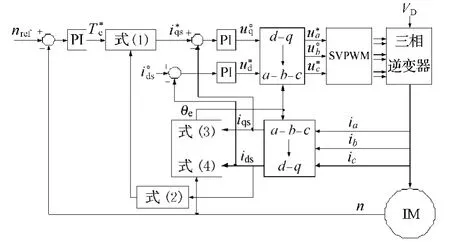
图1 矢量控制原理框图
B相和C相电压有同样结论,只是在结果上相对A相相位分别延迟2π/3和4π/3.
2 系统仿真
基于矢量控制的系统仿真模型按比例模拟船用电力推进系统,包括电源、移相变压、变频、负载和控制五部分.
2.1 系统组成
电源部分包括3台同型号同步发电机,额定功率40kW,额定线电压390V,额定线电流74 A,额定频率50Hz.发电机各经相同长度的电缆连接至母线,由于有功率均分装置,各发电机的相位角一致,潮流相等.
移相变压部分包括2组4个三相变压器,其中一组2个变压器分别产生-7.5°和22.5°移相,另一组2个变压器分别产生7.5°和-22.5°移相,组内变压器相差30°,消除5次和7次谐波,组间变压器相差15°,对称运行时消除11次和13次谐波.两个移相变压器一次侧额定电压均为390V,二次侧额定电压亦为390V,根据电压矢量图(见图2),由正弦定理可得,产生7.5°移相变压器副边两个绕组额定电压分别为412.0V和67.4V;产生22.5°移相变压器副边两个绕组额定电压分别为316.1V和198.2V.

图2 变压器矢量图
负载包括2台异步电动机及其所带负荷,模拟舰船推进电机.每台电动机额定功率22kW,额定线电压380V,额定线电流42.5A,额定频率50Hz,额定转速1 480r/min,实验室模拟电动机J=0.4s.采用前文所述的矢量控制,电机转速和三相电流作为反馈变量送到控制模块,经过图1所示矢量控制环节得到三相参考电压,送至逆变器,再经过SVPWM得到三相输出电压并对推进电机进行供电.
2.2 螺旋桨负载特性
舰船航行时推进电机的工况由螺旋桨工况决定.由于水的阻尼和舰船自身的惯性都较大,推进电机的调速相对舰船调速而言独立进行,从而在不同工况下调速特性不尽相同,负载转矩也因此而有所不同.在自由航行工况,转矩-转速特性近似为二次曲线

式中:My为负载转矩;n为转速;Ky为常系数.侧推电机和正常工况下的主推电机均符合该特性.
在舰船倒车时,螺旋桨进入反转特性,在开始倒车阶段,螺旋桨已经调速至反转,但舰船因惯性作用仍保持正速行使,制动转矩为负值,螺旋桨在水压作用下保持原转向,如图3所示.

图3 螺旋桨反转特性曲线
由于倒车过程中船速不断下降,转矩将随着船速的降低而不断从图3下方曲线过渡到上方曲线.在较短时间内认为船速不变,根据实际工况参数得到近似反转特性曲线表达式为

2.3 仿真结果
1)工况一 单机启动 2台发电机并联运行,1台主推电机带100%负载,另1台电动机起动.发电机电流、功角波形如图4所示.

图4 工况一仿真结果波形
由于谐波影响,功角有脉动,其基波摆动很小,约为10°,经过约2°的超调稳定在22°左右,超调量9%.系统有较大功角稳定裕量,在起动结束后随即进入稳态.
2)工况二 电动机反转
3台发电机工作,2台主推电机满载,船速为0.8pu,第6s时同时调节2台推进电机的速度使其反转至-0.35pu,推进电机与螺旋桨的惯性时间常数为15s.
推进电机的机械转矩与转速对照曲线、推进电机相电流如图5所示.

图5 工况二仿真结果波形
仿真结果符合螺旋桨反转特性,反转过程中电机电流经历频率先降后升过程,与转速变化规律一致.
3 试验比较
实验室模拟实际系统的结构及其各部分参数与仿真模型一致,对工况一进行验证.
调速时推进电机相电流如图6所示.调速结束后电流幅频趋于稳定,系统进入稳态运行.

图6 调速时推进电机相电流波形
起动初期,电流幅值和频率都较小,随着转速上升,幅频均增大,如图7~8所示.

图7 调速初期推进电机相电流波形

图8 调速末期推进电机相电流波形
对比可见,仿真结果与试验结果能够较好地吻合,误差不超过5%,从而验证了系统模型及计算方法的正确性,其数学模型及数值计算方法可以用来对舰船电力系统进行仿真.
4 结束语
电力推进系统包含大功率电机和电力电子装置,远比常规舰船电力系统复杂,并且需要考虑螺旋桨负载特性.采用矢量控制,能够实现同直流电机一样的励磁和转矩解耦控制[8-10],拥有良好的控制特性和动态性能,并可借由SVPWM等效调制函数的引入进一步简化控制算法.
由文中分析可知,仿真效果良好,与实际结果相符合,因此该矢量控制方法可以在实际工程项目中进行运用.
[1]Lee K B,Blaabjerg F.Improved sensorless vector control for Induction motor drives fed by a matrix converter using nonlinear modeling and disturbance observer[J].IEEE,2006,21(1):52-59.
[2]周卫平,吴正国,唐劲松.SVPWM的等效算法及SVPWM与SPWM的本质联系[J].中国电机工程学报,2006,26(2):133-137.
[3]郑 征,陶海军.快速空间矢量PWM控制算法的研究[J].电气应用,2006,25(8):38-40.
[4]魏永清,张晓锋,沈建清.螺旋桨负载特性的仿真研究[J].电机与控制应用.2006,33(6):28-31.
[5]刘 勇,丛 望.螺旋桨负载特性动态仿真实验的研究[J].船电技术,2002(4):22-25.
[6]周德佳,王善铭,柴建云.基于 Matlab-Simulink的舰船综合电力推进系统仿真[J].清华大学学报:自然科学版,2006,46(4):460-464.
[7]叶 斌.电力电子应用技术[M].北京:清华大学出版社,2006.
[8]曹建荣,虞 烈,谢友柏.感应电动机的解耦控制与矢量控制的解耦性质[J].西安交通大学学报,2000,34(6):71-75.
[9]刘长樵.交流电动机磁场定向控制的解耦性分析.电机与控制学报[J].1998,2(1):27-30.
[10]揭贵生,马伟明.电动汽车永磁同步电机驱动系统的制动研究[J].武汉理工大学学报:交通科学与工程版,2007,31(1):133-136.
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
重庆理工大学学报(自然科学)(2022年5期)2022-06-18
微电机(2022年1期)2022-03-21
舰船科学技术(2021年12期)2021-03-29
航空发动机(2020年3期)2020-07-24
兰台世界(2017年10期)2017-06-01
舰船科学技术(2016年1期)2016-02-27
客车技术与研究(2015年3期)2015-08-24
中国舰船研究(2014年1期)2014-05-14
微特电机(2012年10期)2012-10-31
