无刷直流电动机电枢电阻对换相转矩脉动的影响分析
2012-10-31 06:53:28侯红胜刘卫国
微特电机 2012年10期
侯红胜,刘卫国
(西北工业大学,陕西西安 710072)
0 引 言
无刷直流电动机特有的换相电磁转矩脉动问题制约了其在高精度高稳定性场合的应用,解决无刷直流电动机转矩脉动问题一直是近年来的研究热点和难点[1-11]。通过调整换相周期内 PWM的占空比、改变PWM频率、重叠换相等方法可以实现转矩脉动的减小和消除。文献[1-2]对换相期间反电势不恒定做了分析;文献[3-10]对换相期间反电势恒定时进行了分析,均忽略了电枢电阻及其压降;文献[11]考虑了电阻压降;但是换相过程采用平均电流替代实时电流进行计算。电枢电阻在电机中固有存在,在电机运行过程中其压降随着电流的变化而变化,不能忽略。
本文根据电磁转矩与反电势、相电流的关系,以保持换相期间非换相相电流恒定出发,从而消除换相期间转矩脉动。分别计算在低速和高速状态下的不同调制方式及其占空比,同时对不计电枢电阻和计电枢电阻两种情况进行对比。得到不计电枢电阻时会引起电机转矩降低,产生转矩脉动。计电枢电阻后对低速与高速区重新划分,对PWM进行调整,补偿电阻压降,消除了无刷直流电动机换相期间转矩脉动。
1 换相转矩脉动的产生
无刷直流电动机等效电路及驱动电路如图1所示。图中,Ra、Rb、Rc、La、Lb、Lc分别为定子绕组电阻和电感,UN为电机中性点电压,Udc为直流母线电压,ea、eb、ec、ia、ib、ic分别对应 A、B、C 三相反电势和电流。假设三相电路对称,则Ra=Rb=Rc=R,La=Lb=Lc=L。

图1 无刷直流电动机及其驱动电路等效图
无刷直流电动机端电压:

ua、ub、uc是 A、B、C 三相端点电压值。电机三相电流满足:

在换相过程中,电机绕组根据导通与关断状态分为开通相、关断相和非换相相。当无刷直流电动机梯形波磁场宽度大于120°电角度时,换相过程中关断相的电流下降很快,通常不考虑转速的变化,反电势保持不变。电机在运行过程中,电磁转矩Te、机械角速度ωm与相反电势、相电流之间满足:

根据式(2)、式(3)可知,换相期间电磁转矩与非换相相电流绝对值成正比,即与导通相、关断相电流之和成正比[3]。保持换相过程中非换相相电流不变即可消除转矩脉动。
在换相期间根据电机的转速不同,电磁转矩有三种不同的状态[3-10]。如图2所示,i1是关断相电流,i2是开通相电流,i3是非换相电流。由于电枢电感的存在,关断相电流不能立即降为零,同样开通相电流不能立即上升到稳定值。电机在不同的速度区间,电流下降和上升的速度不同。

图2 换相期间三相电流波形示意图
从图2可知,最理想的换相过程是关断相电流下降速度等于开通相电流上升速度。图2(a)中采用开通相施加PWM方式可以使电流上升速度下降,图2(b)中采用关断相施加PWM可以使电流下降速度减慢。所以通过改变换相过程中的PWM占空比可以消除电机在换相过程中的转矩脉动。
2 换相过程分析
无刷直流电动机逆变电路调制方式主要有全桥调制、开通相调制、关断相调制,上桥臂调制、下桥臂调制等。通过分析可知,全桥调制时上桥臂换相和下桥臂换相情况一致,而其他四种情况则需要分别考虑上桥臂换相和下桥臂换相。所以为了简化计算量,采用全桥调制方式。以从A相到B相上桥臂换相为例分析相电流变化。换相时刻前有ia=-ic=I,ib=0。当电机的转动惯量足够大时可以忽略换相期间转矩变化对于电机转速的影响,即反电势满足ea=eb=E,ec= -E。
在低速情况下,需要对T2和T3同时进行PWM调制,减慢B相电流上升速度。当PWM达到100%时,进入高速区,此时保持T2和T3全开,并对T1进行PWM调制,以降低A相电流下降速度。低速时端电压方程为式(4)、式(6):


此时中性点电压:

此时中性点电压:

高速时当PWM=OFF,端电压方程和中性点电压同式(4)、式(5),PWM=ON时端电压方程:

此时中性点电压:

2.1 不计电枢电阻
(1)低速区相电流分析
从式(4)~式(7)可以得到相电流的变化率:

由前述分析可知,当保持C相的电流不发生变化时,可以保证转矩脉动为零。C相在一个PWM周期内的平均值:

令其等于零,得到:

将其代入到式(10)、式(11),得到一个PWM周期内A、B相电流的变化率,两者变化速度相等。

(2)高速区相电流分析
由式(4)、式(5)、式(8)、式(9)可知,在高速区时当PWM=OFF时相电流变化率为同式(10),当PWM=ON时,相电流变化率:

此时,C相电流PWM周期内的变化率:

令其等于零,得到:

将其代入到式(10)、式(14),得到一个PWM周期内A、B相电流的变化率,两者变化速度相等。

2.2 考虑电阻时情况
(1)低速区相电流分析
由式(4)~式(7)可以得到相电流的变化率:

C相在一个PWM周期内的平均值:

令其等于零,得到:

将其代入到式(17)、式(18),得到一个PWM周期A、B相电流的变化率,两者变化速度相等:

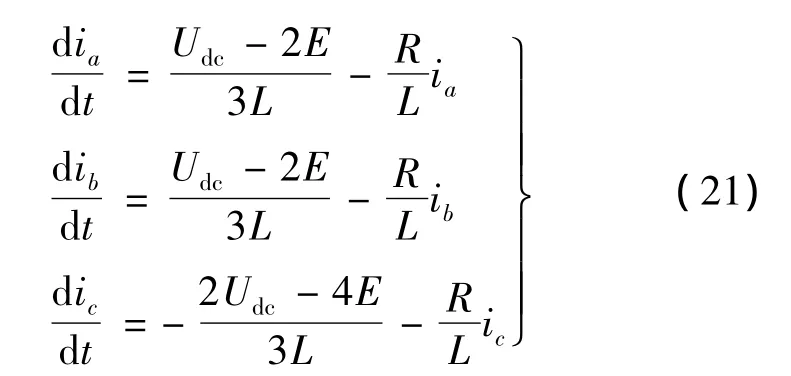
(2)高速情况
由式(4)、式(5)、式(8)、式(9)可知,在高速区时当PWM=OFF时相电流变化率为同式(17),当PWM=ON时,相电流变化率:
C相电流PWM周期内的变化率:

令其等于零,得到:

将其代入到式(17)、式(21),得到一个PWM周期A、B相电流的变化率,两者变化速度相等。

图3是当转速变化时,开关管占空比的变化规律。图3(a)中4E=Udc是高、低速的分界点值,当4E<Udc为低速区,当4E>Udc为高速区。图3(b)中4E<Udc-3RI为低速区,4E>Udc-3RI为高速区。在相同转速下,图3(b)的占空比图3(a)值大。
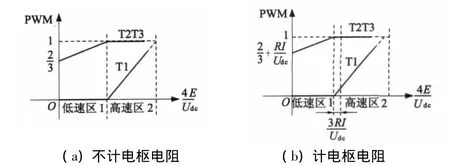
图3 开关管占空比随转速变化规律
2.3 不计电枢电阻引起的转矩波动
从上述分析可知,当输出负载不变时,不计电枢电阻和计电枢电阻在低速区和高速区其占空比分别相差一个常数。当不计电阻时,输出转速相同时,占空比相比计电枢电阻时要小,从而会引起转矩波动。
在低速时,由式(17)、式(18)可知,A相电流变化率:

得到A相电流随时间变化:

当ia=0,得到A相电流下降时间:

对于B相电流变化率,有:

得到B相电流随时间变化:

将tf代入式(28)得到低速时A相电流降为零时B相电流值:

同样可以求得高速时A相电流降为零时B相电流值:

从式(29)、式(30)可知,不论在低速还是高速状态,当A相电流降为零时,B相电流没有上升到稳态值,电磁转矩在换相过程中出现下降。图4为忽略电枢电阻引起电磁转矩脉动随转速变化的情况。在低速区随着转速增加转矩脉动减小,在高速区随着转速增加转矩脉动增加,当速度非常高时,即使电枢电阻压降较小,由其带来的转矩脉动也会很大。

图4 不计电枢电阻带来的转矩脉动随转速关系
3 仿真和分析
通过建立无刷直流电动机及其控制系统模型,调节输出转速,对不计电枢电阻和计电枢电阻两种情况进行仿真。电机主要参数:PN=90 W,Udc=48 V,IN=0.786 A,nN=5330 r/min,TN=0.0512 N·m,R=6.75 Ω,L=0.555 mH。带额定负载运行。
图5是输出转速为2300r/min时相电流波形。此时反电势E=8.0 V,电压、反电势满足条件:4E=Udc-3RI。
图6是输出转速为3000 r/min时相电流波形。此时反电势E=10.5 V,此时电压、反电势关系:Udc-3RI<4E<Udc。

图5 输出转速2300 r/min时相电流波形

图6 输出转速3000 r/min时相电流波形
图5、图6说明考虑电枢电阻后电机转速高低区域发生了变化,转速分界点值下降。
图7~图9是输出转速1600 r/min和4400 r/min时相电流波形图,两种转速分别处于低速区和高速区。图7是换相期间无PWM时相电流波形。图8是不计电枢电阻时对逆变电路进行PWM斩波时相电流波形。图9是计电枢电阻后并对PWM进行了补偿后相电流波形。



由图7~图9可知,当换相期间无PWM调制时,低速时电磁转矩增加,高速时转矩减小。忽略电枢电阻对逆变电流进行PWM调制时,在低速和高速情况下转矩均减小,引起转矩脉动。计电枢电阻后,并对PWM进行补偿,转矩脉动消除。
4 结 语
本文分析了无刷直流电动机换相转矩脉动消除的方法,对不计电枢电阻和计电枢电阻两种情况相电流的变化进行了计算和仿真。通过分析可知:
(1)忽略电枢电阻在换相过程中会引起电磁转矩下降,从而带来转矩脉动。电阻压降越大,转速越高,转矩脉动越大。
(2)通过在低速区和高速区增加占空比,用于补偿电阻压降,能够消除电机换相转矩脉动;
(3)电枢电阻会造成电机运行的低速区和高速区分界点值降低。
[1]Lu H F,Zhang L,Qu W L.A new torque control method for torque ripple minimization of BLDC motor with un - ideal back EMF[J].IEEE Trans.Power Electronics,2008,23(2):950 -958.
[2]Kang Byoung - Hee,Kim Choel- ju,Mok Hyung - Su,et al.Analysis of torque ripple in BLDC motor with commutation time[J].IEEE International Symposium on Industrial Electronics,2001:1044-1048.
[3]Carlson R,Lajoie - Mazenc M,Fagundes J C d S.Analysis of torque ripple due to phase commutation in brushless DC machines[J].IEEE Transactions on Industry Applications,1992,28(3):631-638.
[4]Shi Tingna,Guo Yuntao,Song Peng,et al.A new approach of minimizing commutation torque ripple for brushless DC motor based on DC - DC converter[J].IEEE Trans.on Industrial Electronics,2010,57(10):3483 - 3490.
[5]Song Joong - Ho,Choy Ick.Commutation torque ripple reduction in brushless DC motor drives using a single DC current sensor[J].IEEE Trans.Power Electronics,2004,19(2):312 -319.
[6]Zhang Xiaofeng,Lu Zhengyu.A new BLDC motor drives method based on BUCK converter for torque ripple reduction[C]//The 5th International Power Electronics and Motion Control Conference.Shanghai,China,2006:1 -4.
[7]王淑红,熊光煜.无刷直流电机换相转矩脉动减小及动态仿真[J].电机与控制学报,2008,12(2):169 -173.
[8]宋飞,周波,吴小婧.抑制无刷直流电机换相转矩脉动的新型补偿策略[J].电工技术学报,2008,23(11):28 -33.
[9]林平,韦鲲,张仲超.新型无刷直流电机换相转矩脉动的抑制控制方法[J].中国电机工程学报,2005,26(3):153 -158.
[10]Lin Yong - Kai,Lai Yen - Shin.Pulsewidth modulation technique for BLDCM drives to reduce commutation torque ripple without calculation of commutation time[J].IEEE Trans.Industry Application,2011,47(4):1786 -1793.
[11]Jun - Ho Kim,Jin - Sik Park,Myung- Joong Youn,et al.Torque ripple reduction technique with commutation time control for brushless DC motor[C]//IEEE 8th International conference on Power Electronics- ECCE Asia.2011:1386-1391.
猜你喜欢
防爆电机(2023年6期)2023-11-30 03:05:28
火力与指挥控制(2022年5期)2022-07-25 03:50:10
新型工业化(2021年8期)2021-10-23 10:27:10
电子与封装(2021年7期)2021-07-29 10:58:48
防爆电机(2020年4期)2020-12-14 03:11:02
弹箭与制导学报(2020年1期)2020-07-09 10:52:00
弹箭与制导学报(2019年6期)2019-06-24 08:40:20
电测与仪表(2014年21期)2014-04-04 12:32:08
电工电能新技术(2012年2期)2012-07-02 10:10:04
新高考·高一物理(2012年5期)2012-04-29 20:27:57